【论文笔记】Affine Formation Maneuver Control of Multiagent Systems
【期刊】:IEEE Trans on Automatic Control
【作者】:赵世钰
【参考博客】:参考了CSDN博主「东南坼」的原创文章,文章链接:https://blog.csdn.net/u010038790/article/details/108816612。
该论文研究基于仿射变换的编队控制,重点集中于如何通过控制leader实现maneuver。
摘要:多机编队控制任务通常由两个子任务组成。第一个任务是为了使agent形成所需的几何图案,第二是实现所需的集体动作,使得编队的质心,方向,规模和其他几何参数可以连续地改变。本文提出了一种新颖的仿射编队机动控制方法,同时实现两个子任务。所提出的方法依赖于应力矩阵(stress matrices),其可以被视为同时具有正和负边权重的广义图拉普拉斯矩阵。提出的控制律可以跟踪任何目标编队,这是一个标称队形的时变的仿射变换。质心,方向,在不同方向上缩放,甚至可以连续改变编队的几何图案。所需的编队机动仅被少量的leader-agent所知,并且其余的follower-agent只需要跟随leader。如果可以在每个agent的本地参考系中测量所需的测量值,所提出的控制法是全局稳定的,并且不需要全局参考系。
1.引言
多智能体编队控制任务通常由两个子任务组成。第一种是队形控制,即在给定任何初始队形的情况下,引导一组移动agent形成所需的几何图案。第二种是编队机动控制,即引导移动agent作为一个整体进行机动,以使编队的质心、方向、尺度和其他几何参数可以不断变化。编队机动控制对于编队智能体实现所需的导航任务或动态响应环境(例如避开障碍物)非常重要。
在过去的二十年里,多智能体编队控制已经通过各种方法进行了研究。早期提出的方法例如基于行为法,能处理具有各种agent动力学和约束的复杂的编队任务([1]-[4])。然而,这些方法的系统收敛难以在数学上证明[4]。从实际的角度来看,系统收敛对于多机控制系统至关重要,因为它保证了系统按预期表现。
自从一致性理论成功地应用于编队控制[5]、[6]以来,人们投入了大量的研究工作来开发保证收敛的编队控制方法(最近的研究见[7]和[8])。这些现有的编队控制方法可以根据目标编队的定义进行分类。例如,基于位移、基于距离和基于方位的方法是三种常用的方法,它们分别使用对agent间位移、距离和方位的常数约束来定义目标编队。目标编队常数约束的不变性对编队机动性有重要影响。特别是,agent间的位移约束对编队平移来说是不变的。因此,基于位移的编队控制律可用于跟踪具有时变变换的目标编队[11]、[12]。然而,这种方法很难控制编队的尺度或方向,因为改变尺度或方向需要改变位移约束。作为比较,基于距离的控制律可以用来跟踪具有时变平移和旋转的目标编队[13]、[14] ,但跟踪时变编队的尺度比较困难。基于方位的控制律可以跟踪具有时变平移和尺度的编队[9] ,[10] ,但是很难跟踪时变方向。
由于这三种方法的局限性,研究人员提出了一些改进方法,以实现期望的编队机动。例如, [15] 中的工作通过添加编队尺度估计机制来修改基于位移的编队控制方法,并且 [16] 中的工作修改基于距离的编队控制方法以允许最终编队具有未指定的尺度。然而,这些修改通常导致复杂的控制和估计问题,并且可能需要每个agent的额外的感测或通信能力。最近 [17] 提出了一种能够跟踪一般时变编队的方法。然而,在该方法中必须预先指定每个agent的期望机动。
最近,研究人员提出了一些使用新类型的常数约束来定义目标形成的方法,如局部bearing[18],重心坐标[19],复拉普拉斯 [20] 、 [21] 和应力矩阵 [22] 。由于新约束的不变性增强,这些方法很有吸引力。例如,复拉普拉斯算子对编队的平移、旋转和缩放变化是不变的。因此,基于复杂拉普拉斯算子的方法可以同时实现平移、旋转和缩放编队机动。然而,这种方法仅适用于二维编队控制。
在这些新方法中,基于应力矩阵的方法有望实现泛化的编队机动。一个编队的应力矩阵可以看作一个广义拉普拉斯图。其结构由基础图确定,但矩阵元素的值由编队队形共同确定。与传统的拉普拉斯矩阵不同,在应力矩阵中,边的权重可以是正、负或零。在 [22] 中,应力矩阵已被用于稳定目标编队的稳定性,但它们在解决编队机动控制方面的巨大潜力尚未得到探索。实际上,应力矩阵对于编队构型的任何仿射变换是不变的。仿射变换是可以对应于它们的平移、旋转、缩放、错切或者这几项的组成。因此,应力矩阵为实现各种编队机动行为提供了有力的工具。
本文采用了基于应力矩阵的leader-follower策略来解决编队机动控制问题。本文的主要贡献是三点。
第一,我们解决了领导者选择问题,引入了仿射编队可定位的概念,指示所选领导者是否可以完全控制整个编队以实现所需的仿射变换。证明了仿射可定位的必要和充分条件。
第二,我们提出了基于不同类型测量值的单积分和双积分agent的各种分布式控制律。利用所提出的控制律,不仅可以实现所需的编队模式,任何时变的仿射变换例如:旋转,缩放,甚至是编队的形状形状变形都可以跟踪。提出的控制法是全局稳定的,适用于任意维度的编队控制。
第三,我们提出了线速度和角速度饱和约束下的小车模型的控制律。在固定leader的情况下,提出的非线性控制法被证明是全局稳定的。值得一提的是,如果可以在每个agent的本地坐标系中测量所需的测量,则所提出的控制律不需要全局坐标系。
这篇文章的其余部分如下。第二部分给出了注释和预备条件。第三节描述了仿射编队控制问题,并给出了必要的结果。第四部分研究了领导选择和仿射课定位问题。第五节提出了单、双积分agent的控制律,第六节提出了unicycle agent的非线性控制律。第七节给出了控制律的实现和仿真实例。结论见第八章。
2.标注和条件
本节介绍了本文将使用的一些符号和初步结果。
A.编队项所需符号
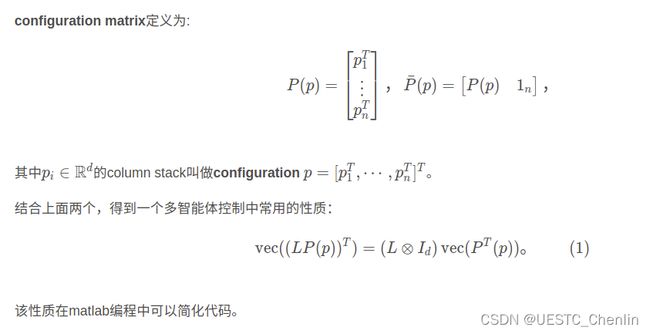
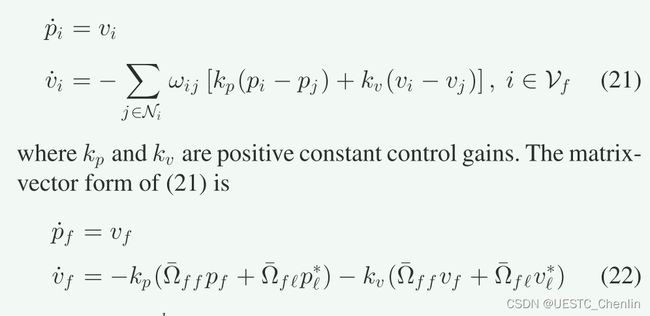
还是利用无向图来描述编队。有向图的关联矩阵H。Kronecker product克罗内克积是两个任意大小的矩阵间的运算。向量![]() 是所有矩阵列的堆叠。
是所有矩阵列的堆叠。

这两项性质在本文中非常有用。
B.仿射span和仿射相关
仿射生成集affine span

例如,两个不同点的仿射生成集是穿过这两个点的1-D线。非共线的三点的仿射生成集是穿过三点的二维平面。非共面四点的仿射生成集是三维空间。如果 被限制为非负,则仿射生成集退化为凸包。
被限制为非负,则仿射生成集退化为凸包。
给定任何仿射span,我们总是可以将其转换为包含原点以获得线性空间。所获得的线性空间的尺寸被定义为仿射span的尺寸。如果仿射span的尺寸是d,那么我们说这些点仿射span![]() 。
。

C.应力矩阵

![]()
当![]() 时,代表在边
时,代表在边 上是吸引力。当
上是吸引力。当![]() 时,是斥力。 向量
时,是斥力。 向量![]() 代表agent-j通过边向agent-i施加的力。因此上式代表其他agent施加给agent-i的力是平衡的。可以从图1中看到解释。
代表agent-j通过边向agent-i施加的力。因此上式代表其他agent施加给agent-i的力是平衡的。可以从图1中看到解释。
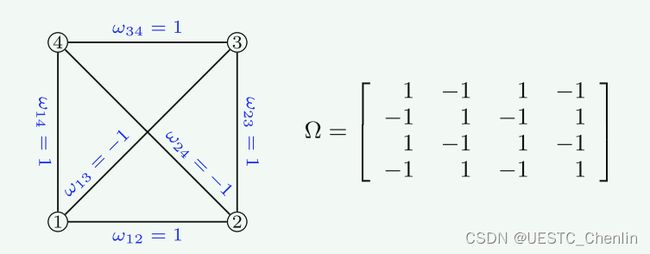
图1:举例说明平衡应力和应力矩阵。在本例中,四个点形成一个正方形,其中每条边的长度等于1,每条对角线的长度等于2。相应的应力矩阵是半正定的,其特征值为{4,0,0,0}。
上式(1)的矩阵形式为:

应力矩阵的结构与图拉普拉斯矩阵类似。不同之处在于,应力矩阵中边的权重可能为正、负或零,而拉普拉斯图中边的权重通常为正。有关应力矩阵的示例,请参见图1。
应力矩阵的性质与编队的结构刚度密切相关。接着回顾了distance rigidity理论中的一些必要概念

3.编队机动控制的问题陈述
本节首先定义了时变目标编队,然后探讨了一个被称为仿射图像的重要概念的性质。
A.时变目标编队
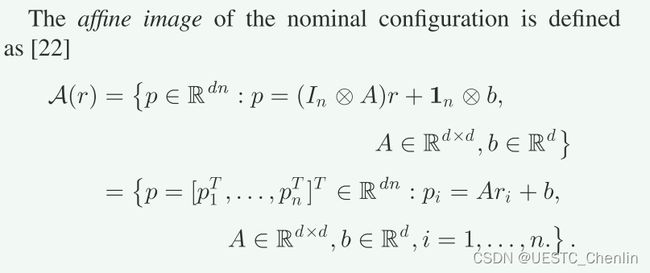
仿射编队机动控制的目标是引导一组智能体跟踪定义如下的时变目标编队。

agent-i在目标编队中的期望位置是![]()
恒定队形 表示编队形成的典型的几何图案。这里,称为标称队形,
表示编队形成的典型的几何图案。这里,称为标称队形,![]() 是标准队形。目标队形实际上是标称队形的时变仿射变换。仿射变换是一种通用线性变换,可以对应于它们的平移,旋转,缩放,剪切或者这几项的组合。注意,在不同方向上的的错切或缩放会使编队形状变形(见图2表示)。仿射变换保留直线和平面。结果,在任何仿射转换后,共线(或共面)点在任何仿射变换后保持共线(或共面)。平行线也通过仿射变换保存。
是标准队形。目标队形实际上是标称队形的时变仿射变换。仿射变换是一种通用线性变换,可以对应于它们的平移,旋转,缩放,剪切或者这几项的组合。注意,在不同方向上的的错切或缩放会使编队形状变形(见图2表示)。仿射变换保留直线和平面。结果,在任何仿射转换后,共线(或共面)点在任何仿射变换后保持共线(或共面)。平行线也通过仿射变换保存。

图2:标称队形的仿射变换说明。(b)、(c)和(d)中的编队分别通过旋转、缩放和错切(a)中的原始队形获得。通过在垂直方向上减小尺度,从(d)中获得编队(e)。四点共线的编队(f)通过将垂直方向上的刻度减至零,从(e)中获得。
利用目标编队的概念,本文中的问题是要控制一组agent去跟踪时变的目标队形,使得![]() 当
当 。解决这个问题的控制策略是让每个agent知道
。解决这个问题的控制策略是让每个agent知道![]() ,使得每个agent可以跟踪其单独的参考轨迹。该策略的缺点是它需要预先指定的所有
,使得每个agent可以跟踪其单独的参考轨迹。该策略的缺点是它需要预先指定的所有![]() 和
和![]() ,并将其存储在每个agent上,这是不切实际的,因为该编队无法动态地响应意外情况,例如弹出式障碍等意想不到的情况。
,并将其存储在每个agent上,这是不切实际的,因为该编队无法动态地响应意外情况,例如弹出式障碍等意想不到的情况。
为了以分布式方式达到目标编队,我们采用了leader-follower策略,其中期望编队机动仅需少量agent知道,称为leader,其他的称为follower,只需要遵循leader。如稍后将显示的,领导者的位置将与仿射转换![]() 有对一的对应关系。因此,整个编队的仿射变换通过控制领导者的位置来实现。由于领导者的数量通常很小,在这项工作中,我们没有特别设计领导者的协同控制律,并只是假设它们可以正确控制。在实际中,领导者可以由人类操作手或智能决策程序控制。假设每个leader的位置等于目标编队中的所需值,即对所有t而言,
有对一的对应关系。因此,整个编队的仿射变换通过控制领导者的位置来实现。由于领导者的数量通常很小,在这项工作中,我们没有特别设计领导者的协同控制律,并只是假设它们可以正确控制。在实际中,领导者可以由人类操作手或智能决策程序控制。假设每个leader的位置等于目标编队中的所需值,即对所有t而言,![]() 。然后,控制目标变为follower,使得
。然后,控制目标变为follower,使得![]() 当。为了实现控制目标,我们需要研究affine image。
当。为了实现控制目标,我们需要研究affine image。
B.标称队形的仿射图像
affine image的定义如下:
仿射图像是由标称队形的所有仿射变换组成的集合。对于所有 ,时变目标队形
,时变目标队形![]() 在
在![]() 中。仿射image
中。仿射image![]() 是一个线性子空间,因为它在加法和标量乘法下是封闭的。在下面的引理中分析了
是一个线性子空间,因为它在加法和标量乘法下是封闭的。在下面的引理中分析了![]() 的维数,这是本文后续分析的一个基本结果。
的维数,这是本文后续分析的一个基本结果。

证明:xxxx
C.Affine image as Null space
本小节探讨在什么条件下![]() 是矩阵的零空间。在本文的其余部分,我们将
是矩阵的零空间。在本文的其余部分,我们将![]() 简写为Ω,Ω总是表示标称队形的应力矩阵。
简写为Ω,Ω总是表示标称队形的应力矩阵。

证明:
因为![]() 满足式(1),
满足式(1), ![]() 也满足式(1),第一个条件成立。由式(3)知,第二个条件成立。
也满足式(1),第一个条件成立。由式(3)知,第二个条件成立。

4.仿射可定位和领导者选择
本节研究了领导者选择的问题。为了通过leader操纵整个编队,我们必须选择足够和适当的leader。首先,我们定义了一个仿射可定性的概念。
定义2(仿射可定性):标准编队![]() 是仿射可定位的,当满足
是仿射可定位的,当满足![]() ,
,![]() 可以被
可以被![]() 确定。(意思就是,只要编队所有成员的位置都处于仿射图像中,那么followers的位置能被leaders确定)。
确定。(意思就是,只要编队所有成员的位置都处于仿射图像中,那么followers的位置能被leaders确定)。
仿射可定性表明如果队形在仿射图像中,那么leaders的位置能够确定其余所有followers的位置。这是一条关键性质,确保了followers能够跟踪任何期望的仿射变换机动。下面证明仿射可定位的充分性和必要性。
仿射可定位:已知![]() ,给定leader节点
,给定leader节点![]() 可以唯一确定target configuration
可以唯一确定target configuration ![]()
.也就是说,A和b被唯一确定。

定理1表明:标准队形中的任意agent能被选为leader的条件是:仿射展开affine span![]() 。
。
然后有以下推论。


则之后的问题变成了如何构建Stress Matrix.
5.仿射编队机动控制律
在这一节,针对单积分或双积分系统提出了分布式仿射编队机动控制律。
A.单积分系统
我们首先考虑单积分系统:![]() ,
, 是控制输入。
是控制输入。
1)静止leader
最简单的情况,当leader是静止时,![]() 。在这种情况下,目标队形也是静态的,那么仿射编队控制问题可以通过以下控制律解决。
。在这种情况下,目标队形也是静态的,那么仿射编队控制问题可以通过以下控制律解决。

稳定性证明:xxx
如(13)中的误差动力学所示,如果![]() 不是单位零,它可能被视为系统的干扰,并可能导致非零跟踪误差。然而,由于控制律是线性的,如果leader速度足够小,跟踪误差也将足够小。接下来,我们将介绍另外两种控制律,它们可以消除跟踪误差,即使
不是单位零,它可能被视为系统的干扰,并可能导致非零跟踪误差。然而,由于控制律是线性的,如果leader速度足够小,跟踪误差也将足够小。接下来,我们将介绍另外两种控制律,它们可以消除跟踪误差,即使![]() 不是零。
不是零。
2)匀速运动leader
如果领导者以恒定的非零速度移动,则控制律(11)无法保证零跟踪误差。要处理这种情况,我们介绍了一个额外的积分项并提出下列PI控制律:

注意,与 (11) 相比,控制律 (14) 不需要额外的测量。通过定义积分项的新状态,可以将控制律 (14) 重写为:

稳定性证明:xxx

3)时变速度leader
当领导者的速度是时变的时,(14)中的PI控制法无法确保零跟踪误差。为了处理时变案例,我们提出了以下需要绝对速度反馈的控制法:

稳定性证明:xxx
在实际中,绝对速度测量值![]() 可以通过无线通信从agent-j传输到agent-i,或通过对位置
可以通过无线通信从agent-j传输到agent-i,或通过对位置 求导来获得。由于通信延迟,这两种方法都将导致测量误差。然而,由于系统是线性的,如果速度测量误差是有界(或足够小的),则跟踪误差也将被限定(或足够小)。请注意,由于绝对速度测量的要求,控制律(20)无法在每个agent的本地参考系中实现。
求导来获得。由于通信延迟,这两种方法都将导致测量误差。然而,由于系统是线性的,如果速度测量误差是有界(或足够小的),则跟踪误差也将被限定(或足够小)。请注意,由于绝对速度测量的要求,控制律(20)无法在每个agent的本地参考系中实现。
B.双积分系统
当agent被建模为双积分系统时,![]() ,
, 是速度,是控制输入。
是速度,是控制输入。
1)零加速度leader
我们首先考虑一个最简单的情况,即领导者的加速度为零。以下控制律可用于处理这种情况:
稳定性证明:xxx

从误差动力学 (23) 可以看出,当![]() 为非零时,将导致非零跟踪误差。在以下各小节中将提出能够消除存在非零
为非零时,将导致非零跟踪误差。在以下各小节中将提出能够消除存在非零![]() 值时的跟踪误差的控制律。
值时的跟踪误差的控制律。
2)匀加速度leader
为了处理leader在非零恒定加速度下移动的情况,我们提出了如下PI控制律:

注意,与控制律(21)相比,控制律(24)不需要额外的测量。控制律(24)的稳定性分析如下:xxxx。

3)时变加速度leader
为了处理领导者使用时变加速度移动的情况,我们提出了以下需要绝对加速度测量的以下控制律:

从误差动力学(26)可以看出,绝对加速度测量值的作用是消除包含![]() 的项。在实际中,加速度可以通过从agent-J到agent-i传输的加速度或者使用速度的微分来传输。在任何一种情况下,加速度测量值都会有误差。如果测量误差有界(或足够小),则跟踪误差将被界定(或足够小)。请注意,由于绝对速度测量的要求,控制律(25)无法在每个agent的本地参考系中实现。
的项。在实际中,加速度可以通过从agent-J到agent-i传输的加速度或者使用速度的微分来传输。在任何一种情况下,加速度测量值都会有误差。如果测量误差有界(或足够小),则跟踪误差将被界定(或足够小)。请注意,由于绝对速度测量的要求,控制律(25)无法在每个agent的本地参考系中实现。
6.仿射编队控制的约束
本节研究受非完整运动和速度饱和约束的仿射编队控制。这里,我们只考虑领导者是静止的情况。未来将研究移动领导者的情况。
A.平面上的Unicycle(小车)agent

1)没有饱和约束:
7.补充和仿真
为了实现所提出的控制律,第一步是设计满足假设1-3的标称队形。为了满足假设1,标称队形必须仿射span![]() 。为了满足假设2,可以将标称编队设计为一般通用刚性。为了满足假设3,必须至少选择在标称队形中仿射展开
。为了满足假设2,可以将标称编队设计为一般通用刚性。为了满足假设3,必须至少选择在标称队形中仿射展开![]() 的d+1个agent作为领导者。一旦设计了标称队形,下一步是计算应力矩阵。计算应力矩阵是非平凡的。文献 [22] 表明,该问题可以表述为动态规划问题。在这里,我们提出另一种方案。
的d+1个agent作为领导者。一旦设计了标称队形,下一步是计算应力矩阵。计算应力矩阵是非平凡的。文献 [22] 表明,该问题可以表述为动态规划问题。在这里,我们提出另一种方案。
A.计算平衡应力
 是标准队形的应力向量,
是标准队形的应力向量,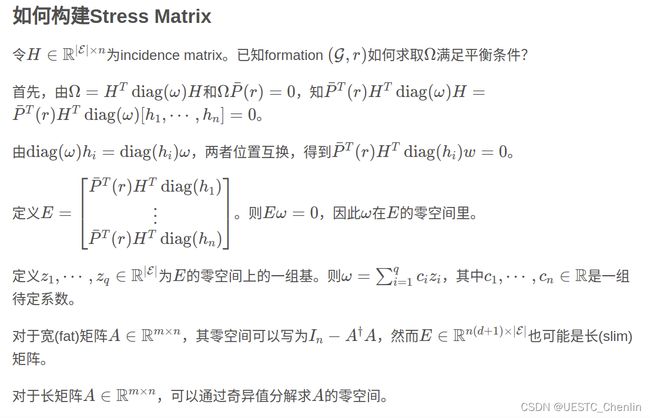

B.仿真样例
接下来我们给出两个仿真例子。两个仿真示例的标称队形如图3所示。其中前三个agent被选为leader,其余代理被选为follower。由于标称编队中的三个leader不是共线的,它们近似地affine span平面。利用命题2中提出的方法,我们计算了平衡应力,如图3所示.将平衡应力归一化,使其范数为单位1。相应的应力矩阵是正半定的,满足秩 (Ω) = n-d-1 = 4。第一个仿真示例如图4所示,在式(25) 中证明了双积分agent动力学的控制律。正如可以看到的,编队保持机动以改变其质心、方位、尺度和几何图案,以避免障碍物,通过狭窄通道等。编队机动时,跟踪误差保持为零。

图三:仿真实例中的标称队形。平衡应力绘制在每条边上。在这里,应力被标准化,使得它的范数是1。应力矩阵为半正定,特征值为{1.4432,1.3218,0.5967,0.3383,0, 0,0}。注意,标称编队的队形不是几何的,因为存在共线的agents。


图4:通过仿真示例说明双积分agent的控制律(25)。控制增益选择为Kp=0.5和Kv=2。
在仿真中,预先生成三个leader的轨迹。在实际应用中,leader可以根据环境中的任务需求和障碍实时生成合适的轨迹。此外,必须注意的是,定理1中leader的仿射span条件是关于标称队形的。当编队机动时,leader不需要满足这一条件。例如,如仿真结果中所示,leader可以变为共线,因此,不具有仿射span![]() 。最后,在仿真中,加速度反馈延迟0.001秒。在仿真中观察到,虽然跟踪误差总是有界的,但更大的延迟会导致更大的跟踪误差。
。最后,在仿真中,加速度反馈延迟0.001秒。在仿真中观察到,虽然跟踪误差总是有界的,但更大的延迟会导致更大的跟踪误差。
第二个仿真示例如图5所示。在式(31) 中证明了受速度饱和约束的小车agent的控制律。在这个例子中,leader是静止的。李亚普诺夫函数单调收敛于零。注意,在这个例子中,leader之间的相对位置不同与标准队形。因此,最终的编队是标准队形的仿射变换。结果表明,尽管最终编队的形状发生了扭曲,但共线和平行线仍保留在最终队形中。


图5:仿真示例以说明控制律(31),利用具有速度饱和约束的小车模型。
为了简单起见,在上述模拟结果中,使用无向线来表示agent之间的交互。然而,必须注意的是leader和Follower之间的交互是有向的,而不是双向(无向)的,因为领导者不需要接收追随者的信息。
8.总结
本文提出了一种新的基于应力矩阵的编队机动控制方法。提出了单积分、双积分和小车agent模型的分布式控制律,证明了该方法的全局稳定性。该控制律可以跟踪任何标称编队的时变仿射变换的目标队形。因此,编队的质心、方位、不同方向的尺度以及其他几何参数都可以连续改变。如果可以在每个agent的本地参考系中测量相对测量值,则控制律不需要通用的全局坐标系。
应力矩阵可以看作是具有负或零边权的广义拉普拉斯矩阵。本文提出的线性仿射编队控制律具有与一致性协议或包容控制律(即具有多个领导者的一致性协议)相似的表达式 [32] 、 [33] 。本文所做的工作表明,在负边权的情况下,一致型控制律具有许多新的特点。近年来,负权重网络上的共识问题受到越来越多的研究关注 [34], [35] 。未来的研究有几个重要的课题。例如,本文给出的结果可以通过考虑更复杂的Agent动力学、运动约束和有向基础图来推广。