【人工智能笔记】第十六节 目标检测算法mAP分数计算方式,及代码实现
现在各个目标检测比赛中,都采用mAP分数来作为评分标准。下面我们分析一下mAP计算涉及到哪些数据,以及如何计算的。
首先说一下TP(True Positive)计算,对应目标结果,有4种情况:True Positive (TP)、False Positive (FP)、False Negative (FN)、True Negative (TN),如下面:
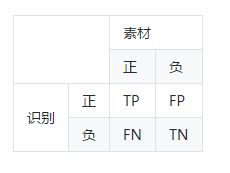
计算预测框与实际框(Groud Truth)的IoU(Intersection over Union)值,对应每个实际框选,IoU大于阈值(通常为0.5),同时IoU最大的预测框为TP,其余框为FP。遍历所有测试集图片组成一个TP列表,列表记录了每个预测框是否TP。
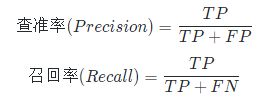
然后计算查准率(Precision)与召回率(Recall),将TP列表按分类分数进行排序,循环遍历所有值,组成Precision列表和Recall列表。下面是Precision和Recall的计算公式:
最后是计算单类AP值,从后往前循环遍历Precision列表,进行两两比较,取最大值,使列表连续递减。取Recall每次变化为区间,计算 AP = 区间内最大Precision * 区间长度。计算各个类的AP值,求平均就是最终的mAP值。
实现代码如下:
import numpy as np
def Get_TPFP(data, class_id, thresh=0.5):
'''
计算TPFP
data:[{
'image_path': '*.jpg',
'groud_truth': [[x1,y1,x2,y2,class_id], ...],
'prediction': [[x1,y1,x2,y2,class_id,score], ...],
}]
return
tp:[[tp,score], ...]
'''
tp = []
groud_truth_num = 0
for d in data:
# (1, groud_truth_num, 6)
groud_truth = np.array(d['groud_truth'], dtype=np.float)
groud_truth = groud_truth[groud_truth[..., 4]==class_id]
groud_truth = np.expand_dims(groud_truth, axis=0)
groud_truth_num += groud_truth.shape[1]
# print('groud_truth:', groud_truth.shape, groud_truth)
# (prediction_num, 1, 6)
prediction = np.array(d['prediction'], dtype=np.float)
prediction = prediction[prediction[..., 4]==class_id]
prediction = np.expand_dims(prediction, axis=1)
# print('prediction:', prediction.shape, prediction)
if groud_truth.shape[1] == 0 or prediction.shape[0] == 0:
continue
# 计算IOU
groud_truth_mins = groud_truth[..., 0:2]
groud_truth_maxes = groud_truth[..., 2:4]
groud_truth_wh = groud_truth_maxes - groud_truth_mins
prediction_mins = prediction[..., 0:2]
prediction_maxes = prediction[..., 2:4]
prediction_wh = prediction_maxes - prediction_mins
intersect_mins = np.maximum(groud_truth_mins, prediction_mins)
intersect_maxes = np.minimum(groud_truth_maxes, prediction_maxes)
intersect_wh = np.maximum(intersect_maxes - intersect_mins, 0.)
intersect_area = intersect_wh[..., 0] * intersect_wh[..., 1]
groud_truth_area = groud_truth_wh[..., 0] * groud_truth_wh[..., 1]
prediction_area = prediction_wh[..., 0] * prediction_wh[..., 1]
# (prediction_num, groud_truth_num)
iou = intersect_area / (groud_truth_area + prediction_area - intersect_area)
# print('iou:', iou.shape, iou)
# print('iou:', iou>=thresh)
# print('iou:', np.argmax(iou, axis=0))
# print('iou:', np.argmax(iou, axis=1))
tp_one = np.zeros((prediction.shape[0],))
# 按groud_truth查找最大iou的prediction下标
iou_max = np.argmax(iou, axis=0)
for i in range(iou_max.shape[0]):
if iou[iou_max[i],i]>=thresh:
tp_one[iou_max[i]] = 1
tp_one = np.expand_dims(tp_one, axis=-1)
tp_one = np.concatenate([tp_one, prediction[:, 0,5:6]], axis=-1)
# print('tp_one:', tp_one)
tp.append(tp_one)
tp = np.array(tp)
tp = tp.reshape((-1, 2))
# 排序
tp = tp[np.argsort(tp[:, 1])[::-1], :]
# print('tp:', tp.shape)
# print('tp:', tp)
# print('groud_truth_num:', groud_truth_num)
return tp, groud_truth_num
def Get_AP(data, class_id, thresh=0.5):
'''计算AP'''
# 计算TP
tp, groud_truth_num = Get_TPFP(data, class_id=class_id, thresh=thresh)
# 计算precision和recall
precision_list = []
recall_list = []
tp_sum = 0.0
for i in range(tp.shape[0]):
if tp[i][0] == 1:
tp_sum += 1.0
precision = tp_sum / (i+1)
precision_list.append(precision)
recall = tp_sum / groud_truth_num
recall_list.append(recall)
# print('tp_sum:', tp_sum)
# print('precision_list:', precision_list)
# print('recall_list:', recall_list)
# 计算AP
mrec = np.concatenate(([0.], precision_list, [1.]))
mpre = np.concatenate(([0.], recall_list, [0.]))
# print(mpre)
# compute the precision envelope
# 使precision一直下降,去掉波动
for i in range(mpre.size - 1, 0, -1):
mpre[i - 1] = np.maximum(mpre[i - 1], mpre[i])
# to calculate area under PR curve, look for points
# where X axis (recall) changes value
i = np.where(mrec[1:] != mrec[:-1])[0]
ap = np.sum((mrec[i + 1] - mrec[i]) * mpre[i + 1])
# print('ap:', ap)
return ap
def Get_mAP(data, class_num, thresh=0.5):
'''计算mAP'''
ap_sum = 0.0
for class_id in range(class_num):
# print('class_id:', class_id)
ap = Get_AP(data, class_id, thresh=thresh)
ap_sum += ap
return ap_sum / class_num
def main():
data = [
{
'image_path': '*.jpg',
'groud_truth': [[1,1,2,2,1], [1,1,2,2,2], [1,1.3,2.4,2,1], [3,1,4,2,2]],
'prediction': [[1.1,1,2.1,2.2,1,0.8], [1.2,1.2,2.2,2.2,2,0.7], [1.1,1.3,2.4,2.1,1,0.6], [1.1,1.1,2.1,2.1,1,0.9]],
},
{
'image_path': '*.jpg',
'groud_truth': [[1,1,2,2,1], [1,1,2,2,2], [1,1.3,2.4,2,1], [3,1,4,2,2], [3,1,4,2,0]],
'prediction': [[1.1,1,2.1,2.2,1,0.8], [1.2,1.2,2.2,2.2,2,0.7], [1.1,1.3,2.4,2.1,1,0.7], [1.1,1.1,2.1,2.1,1,0.6]],
}
]
mAP = Get_mAP(data, class_num=3, thresh=0.5)
print('mAP:', mAP)
if __name__ == '__main__':
main()参考资料:https://blog.csdn.net/qq_35916487/article/details/89076570