基于图卷积网络的测量与先验知识相结合的故障诊断方法
目录
Graph Convolutional Network-Based Method for Fault Diagnosis Using a Hybrid of Measurement and Prior Knowledge
Abstract
Introduction
Preliminary
A.Graph Convolution Network
B.Main Step of Fault Diagnosis Based on GCN
GCN-SA Method
A. Method Framework
1)Overall Framework of the Proposed Method
2)Sliding-Window Method
3)Using SA Method to Prediagnose the Fault in the Dataset:
4) Constructing Association Graph Based on SA
5)Constructing Weighted GCN Structure
6)GCN-SA Training model
B. Advantages of GCN-SA Method
1) Conparison Between GCN-SA and Model Based Fault Diagnosis Method:
2)Comparison Between GCN-SA Method and GCN Method:
3)Comparison Between GCN-SA Method and GCN-Based Fault DIagnosis Method
4)Introducting of Weight Coefficient θ:
Experimental Study
A. Data Description
B. Experimental Result to verify the Effectiveness of GCN-SA Method
1)Fault Diagnosis Based on SA
2)Comparison of Several Methods:
3)Discussion on the Effect of θ
ConClusion
优点:
改进方向:
Graph Convolutional Network-Based Method for Fault Diagnosis Using a Hybrid of Measurement and Prior Knowledge
Abstract
基于深度神经网络的故障诊断方法已经得到广泛应用。兴趣系统的先验知识,有利于故障诊断 。
本文提出方法:
基于图卷积网络(GCN)的故障诊断方法,混合了可用测量和先验知识。
- 首先使用结构分析(SA)方法对故障进行与诊断,然后将预诊断结构转换为关联图。
- 将图和测量值发送到GCN模型中,其中引入权重系数来调整测量值和先验知识的影响。
- 以GCN图结构为连接点,连接基于模型的SA和基于数据的GCN
result:提出 方法结合SA和GCN的优点,比现有基于共同评价指标的方法具有更好的诊断效果。
Introduction
基于先验知识构建一个近似的物理模型或状态观测器。
图卷积网络(GCN,by Scarselli et al)通过引入关联图来获取数据之间的关系,从而加快训练速度,提高模型性能。
图数据结构中的半监督学习分类的思想引入图卷积网络的建设中。
GCN在数据分析方面的巨大优势,将此方法引入故障诊断领域:
- 采用GCN框架实现配电网故障定位,具有良好的鲁棒性。
- 应用深度GCN为滚子轴承提供基于声学的故障诊断。
基于GCN的故障诊断方法也存在局限性:
- 提取所有数据的特征,然后根据特征之间的相似度确定数据相关图,这种方式得到的关联图并不能保证准确度,必然会对网络的训练产生负面影响。
- 从本质上将,这种方法严重依赖标记的数据集。一旦标注的数据集不足,网络精度将会受到很大的影响。在实践中,收集标记数据集费时费力,而未标记的数据却非常丰富。
因此提出一种基于结构分析的GCN故障分析(GCN-SA)来解决故障诊断的局限性
提出的方法综合观察到的数据和兴趣系统的先验知识
首先采用结构分析(SA)方法提前诊断故障,然后构建GCN所需的关联图。
然后,在GCN的构建中引入权重系数来调整数据和先验知识的影响权重
最后,通过改进的GCN实现故障诊断
主要贡献:
- 提出了一种新的GCN-SA方法,该方法可以集成兴趣系统的测量和先验知识。
- 可以解决只有一小部分标记数据可用的实际问题
- 权重性能被提议使用测量和先验知识,通过自适应调整它们对网络性能的影响。
Preliminary
A.Graph Convolution Network
GCN的本质:将获取的输入数据集中每个测量的关联图视为先验知识,其目的是提高模型性能或减少训练时间消耗。
GCN分为两类:
- 基于空间域(Spatial domain)
基于空间域的方法在实践中效果不佳,缺乏相应的数学解释
- 基于谱域(Spectral domain)
本文基于谱域的GCN方法,步骤:1)关联图的构建 2)GCN的传输
1)Construction of Association Graph
考虑一个数据集![]() ,包含n个测量值,每个测量值是一个长度m的时间序列。设数据集
,包含n个测量值,每个测量值是一个长度m的时间序列。设数据集![]() 的关联图为G=(V,A),其中
的关联图为G=(V,A),其中![]() 是图的节点集,每个节点代表数据集中的一个测量值
是图的节点集,每个节点代表数据集中的一个测量值![]() ,
,![]() ,A是关联图G的邻接矩阵,表示节点之间的连接信息。矩阵中的元素只包含0和1,分别表示为
,A是关联图G的邻接矩阵,表示节点之间的连接信息。矩阵中的元素只包含0和1,分别表示为

在关联图G中,两个连接节点之间关系的好坏之间影响GCN的模型性能。
当GCN应用传统领域,可以在收集数据集的同时轻松获得G(关联图)
在故障诊断领域,通常根据测量值之间的相似度(如cosine相似度或欧几里得距离)来确定测量值之间的关系。
一种常用的方法是提取这些测量值的特征,计算特征之间的相似度,然后设置相应的阈值,这意味着两个测量值之间的关联相似度高于阈值。
2)Forward Propagation of GCN
考虑到一个卷积运算 ![]() ,
,![]() 表示包含n个数据的数据集,
表示包含n个数据的数据集,![]() 表示可训练神经网络中的参数。
表示可训练神经网络中的参数。
根据Fourier transform,f,x可以变换到频域。


![]() 是傅里叶变换的基础,一般使用三角函数(trigonometric function),在GCN方法中,为了关联引入神经网络,使用了特殊的基。构造方法如下:
是傅里叶变换的基础,一般使用三角函数(trigonometric function),在GCN方法中,为了关联引入神经网络,使用了特殊的基。构造方法如下:
首先根据关联图G构造对应的Laplacian 矩阵![]()
其中A由式(1)得到,![]() 为n维单位对角矩阵n×n,D是对角矩阵,
为n维单位对角矩阵n×n,D是对角矩阵,![]() 的值在对角线上,一般称为度矩阵(degree matrix)。对
的值在对角线上,一般称为度矩阵(degree matrix)。对![]() 进行特征值分解,得到傅里叶变换中的基
进行特征值分解,得到傅里叶变换中的基 ![]() 。
。![]() 是由Laplacian矩阵
是由Laplacian矩阵![]() 的所有特征向量组成的矩阵,
的所有特征向量组成的矩阵,![]() 是由
是由![]() 的所有特征值组成的特征值矩阵
的所有特征值组成的特征值矩阵
关联图作为GCN的先验知识,以矩阵U的形式嵌入到网络的前向传播中,其向量相互正交,满足傅里叶变换基的基本数学要求,这就是为什么在GCN的前向传播中使用矩阵U而不是矩阵L的原因。根据卷积定理,结合式(2)和(3)

![]()
![]()
![]()
![]() 是Hadamard积
是Hadamard积
在[ “Manifold regularization: A geometric framework for learning from labeled and unlabeled examples”]中,![]() 被设置为包含Chebyshev多项式
被设置为包含Chebyshev多项式![]() 的形式,即
的形式,即![]()
当 ![]()
![]() ,
,![]() 可以得到一下推导式:
可以得到一下推导式:

通过进一步设置![]() 根据切比雪夫多项式的特殊值
根据切比雪夫多项式的特殊值![]() ,式(4)可以简化为
,式(4)可以简化为
![]()
设置![]() ,得到卷积运算的单参数公式
,得到卷积运算的单参数公式![]()
最后将 扩展到数据集
扩展到数据集 ,由长度为m的那个测量值组成,然后通过归一化操作来防止网络传播中梯度消失或爆炸,得到标注GCN的前向传播公式
,由长度为m的那个测量值组成,然后通过归一化操作来防止网络传播中梯度消失或爆炸,得到标注GCN的前向传播公式![]()
其中![]() ,
,![]() 是激活函数,通常取ReLU函数,
是激活函数,通常取ReLU函数, ![]() 是网络的参数矩阵,
是网络的参数矩阵,![]() 表示当层神经网络输出值的维度网络,可自由设置。
表示当层神经网络输出值的维度网络,可自由设置。
B.Main Step of Fault Diagnosis Based on GCN

输入传统GCN-based只是原始数据,不包括任何兴趣系统的先验知识。因此这是一个纯粹的基于数据的故障诊断方法。
图1中,数据集的测量特征包括任何时频特征,每个测量像是的指标可以通过它们特征相似度来确定。此外,如果两个测量值中的任何一个足够相似(相似度指数大于预设阈值),则它们在图中相互连接。这样可以确定数据集的关联图。
GCN-SA Method
A. Method Framework
1)Overall Framework of the Proposed Method

假设故障类型总数为M,用滑动窗口法对传感器采集的原始时间序列波形![]() 进行切片,得到由n个滑动窗口测量值组成的数据集
进行切片,得到由n个滑动窗口测量值组成的数据集 ![]()
![]() 。将数据集X中的测量值导入SA模型,得到预诊断结果
。将数据集X中的测量值导入SA模型,得到预诊断结果![]() ,得到数据集X的关联图G。即可基于关联图,构建GCN结构
,得到数据集X的关联图G。即可基于关联图,构建GCN结构![]() ,将X的标记部分组合成训练集来训练GCN,所有测量值都可以输入数据集去训练GCN。最后得出故障诊断结果。
,将X的标记部分组合成训练集来训练GCN,所有测量值都可以输入数据集去训练GCN。最后得出故障诊断结果。
2)Sliding-Window Method
将一个较长的波形测量分成多个较短的波形数据
![]()
有![]() 个测量值,每个测量值有
个测量值,每个测量值有![]() 个变量,每个变量是一个长度为
个变量,每个变量是一个长度为![]() 的波形
的波形
![]() 个测量值可以表示
个测量值可以表示![]() 类故障,通过设置步长
类故障,通过设置步长 ![]() 和窗口长度
和窗口长度![]() ,得到数据集
,得到数据集![]() ,
,![]()
并且![]() 运算符表示向下舍入。
运算符表示向下舍入。
3)Using SA Method to Prediagnose the Fault in the Dataset:
通过程序化的步骤完成对兴趣系统的故障诊断。基于已知的系统数学模型作为先验知识,可以方便快捷地实现故障诊断。本文用它来预诊断数据集中的故障。
具体诊断过程可分为一下几个步骤
S1(Analysis of the Fault System Structure)
基于兴趣系统已有的拟合模型,列出所有方差,将方程组中的变量分为未知变量、故障变量和已知变量。构建系统的结构模型图(结构表征图),反应方程组中变量与方程之间的关系。
S2(Fault Analysis)
利用DuImage-Mendelsohn(DM)分解和故障隔离矩阵(FI)分析了故障可检测性(FD)和故障隔离(FI)。DM分解是一种操作工具,用于重新排列类似上三角形式的系数矩阵。它可以将原始系统的结构模型图分解为三类区域:
1)结构欠定部分![]() ,未知变量的数量多于方程数量
,未知变量的数量多于方程数量
2)正定部分![]() ,未知变量的数量等于方程数量
,未知变量的数量等于方程数量
3)结构超定部分![]() ,未知变量的数量少于方程的数量
,未知变量的数量少于方程的数量
SA方法侧重于超定结构部分,方程个数大于未知变量的个数意味着结构中存在解析冗余部分。
如果方程中的所有故障都处于超定部分,则可以检测到所有故障;
相反,如果正定部分或欠定部分存在故障,则无法检测到故障,此时必须更改结构特征图结构,常用方法:增加传感器数量,以获取有关系统的更多信息,从而建立新的冗余关系,使所有故障都出现在超定部分。
系统的隔离分析必须在可检测性分析之后。
隔离:系统在故障发生时,将故障与其他故障区分开来的能力。
在系统模型![]() 中,如果故障
中,如果故障![]() 和
和![]() 满足以下关系,则
满足以下关系,则![]() 和
和![]() 可以相互隔离。
可以相互隔离。

 分别是带有故障
分别是带有故障![]() 和
和![]() 的方程,
的方程,![]() 是消除方程
是消除方程 后结构的超定部分。
后结构的超定部分。
S3(Construct Residuals)
在所有故障都能被完全检测和隔离的基础上,产生多个残差进行故障诊断。残差的含义是残差包含故障变量,当故障变量的值为0时,残差值相应为0。
因此,在实际诊断过程中,在没有故障(此时故障变量值为0)的情况下,残差值会接近0(考虑噪声干扰),残差的绝对值为故障条件下的最大值(故障值不为0)。由于每个残差可能包含多个故障变量,因此残差值与0的偏差表示残差中包含的所有故障都可能发生,因此可以列出剩余故障关系表。
S4 Determ the fault diagnosis strategy
为每个残差设置相应的阈值,如果在实际诊断中残差值超过阈值,则认为发生了异常情况,综合考虑各个残差的一次情况确定故障诊断规则表。
S5
滑动窗口法得到的所有测量值![]() 依次用SA法进行故障诊断,分别计算S3中构造的残差。然后将所有残差与对应的阈值进行比较,参照故障诊断规则表得到诊断结果集
依次用SA法进行故障诊断,分别计算S3中构造的残差。然后将所有残差与对应的阈值进行比较,参照故障诊断规则表得到诊断结果集![]() 。
。
每个诊断结果都写成一个热向量
![]()
4) Constructing Association Graph Based on SA
关联图可以理解为GCN对感兴趣系统的先验知识,其质量对GCN的模型性能有着非常重要的影响。传统的基于GCN的故障诊断方法在构造关联图时无法保证其准确性。(why)
使用SA获得的预诊断结果![]() 来构造关联图
来构造关联图
模型的先验知识是否正确影响了基于SA的故障诊断方法的准确性。模型的先验知识并不完全正确,因此对应的![]() 也不完全正确。因此,在GCN-SA方法中,
也不完全正确。因此,在GCN-SA方法中,![]() 仅用于关联图G的构建,而不作为标签集参与后续GCN模型的训练。
仅用于关联图G的构建,而不作为标签集参与后续GCN模型的训练。
根据预诊断结果![]() ,确定关联图
,确定关联图![]() 。
。![]() 反映了图像的“顶点”
反映了图像的“顶点”![]() 表示数据集中的所有测量值。
表示数据集中的所有测量值。
A是一个邻接矩阵,反映了节点之间的连接,也就是图的边,
根据G的结构,由SA划分为同一故障类型的所有测量在图中相互连接,所有划分为不同故障类型的测量之间没有联系。G实际上是由M个块组成的图,M代表故障类型的个数。如图三,G被分为四部分。

5)Constructing Weighted GCN Structure
根据关联图G,构建一个特殊域的GCN模型。
神经网络的输入数据集应该是数据集X,经过滑动窗口法处理,在传统的GCN中,单层GCN的前向传输公式为

![]() 是通过添加关联图G的邻接矩阵A和单位矩阵直接得到的
是通过添加关联图G的邻接矩阵A和单位矩阵直接得到的

 由式(1)获得。
由式(1)获得。
![]()
![]() 。可以得到
。可以得到

公式表明,GCN的数据集![]() 可以通过输入数据集X的线性变换
可以通过输入数据集X的线性变换![]() 获得,并且
获得,并且![]()
![]() 中的每个测量值都会受到与其相连的测量值的影响(由邻接矩阵A引起),和它本身(有单位矩阵
中的每个测量值都会受到与其相连的测量值的影响(由邻接矩阵A引起),和它本身(有单位矩阵![]() 引起),两者的影响是一样的。
引起),两者的影响是一样的。
关联图G本身并不完全准确,它可以被视为模型的先验知识。
当训练集规模较小时,关联图对网络准确率的提升贡献很大,而训练集的贡献较小;
当训练集的规模足够大时,不完整的先验知识对网络提升的贡献很大,但足够的训练集的贡献更大。因此方法中加入权重系数![]() ,将式(9)变为
,将式(9)变为

![]() 是与训练集大小正相关的系数,可以设置为
是与训练集大小正相关的系数,可以设置为![]() ,k是增益因子,r是训练集大小占总数据集大小的比例。
,k是增益因子,r是训练集大小占总数据集大小的比例。
因为r的变化范围不够大![]() ,同时引入指数函数和增益因子k来增加
,同时引入指数函数和增益因子k来增加![]() 的变化范围。
的变化范围。![]() 可以理解为调整先验知识(通过A影响网络训练)和训练集(通过
可以理解为调整先验知识(通过A影响网络训练)和训练集(通过![]() 影响网络训练)影响的权重值。
影响网络训练)影响的权重值。
在GCN层之后添加两个一维卷积(Conv1D)层,用于特征提取。最后添加两个全连接层和一个softmax层,以确保GCN-SA神经网络模型的输出为一个热向量形式,即

![]() 是GCN层的输出值,由式(10)获得,
是GCN层的输出值,由式(10)获得,![]() 是全连接层参数,
是全连接层参数,![]() 是GCN-SA神经网络的最终输出值。
是GCN-SA神经网络的最终输出值。
6)GCN-SA Training model
本文采用分类思想进行故障诊断,以交叉熵损失函数作为神经网络的优化目标。
故障诊断中可以收集的数据集通常由大量未标记的测量值和一小部分标记的测量值组成,因此只需要数据集X的一小部分有其对应的标签,可以形成训练集![]() 和对应的标签集
和对应的标签集![]() ;测量的另一部份没有对应的标签,可以形成测试机
;测量的另一部份没有对应的标签,可以形成测试机![]() 。在训练过程中,神经网络根据关联图G获得数据集X中所有测量值的关联关系,并将整个数据集X输入神经网络。借助图G,该方法实际上使用了整个数据集,这是一种半监督方法
。在训练过程中,神经网络根据关联图G获得数据集X中所有测量值的关联关系,并将整个数据集X输入神经网络。借助图G,该方法实际上使用了整个数据集,这是一种半监督方法
由于GCN模型接收到整个数据集中的所有测量值,将对所有测量值进行预测,并根据式(12)得到![]() 。构造损失函数时,只累加训练集的交叉熵损失函数。由于关联图G反映了整个数据集的关系,因此测试机也参与了训练。但是对于GCN模型,测试集的标签是不可见的,所以不会累积测试集的交叉熵损失函数,因此总损失函数为:
。构造损失函数时,只累加训练集的交叉熵损失函数。由于关联图G反映了整个数据集的关系,因此测试机也参与了训练。但是对于GCN模型,测试集的标签是不可见的,所以不会累积测试集的交叉熵损失函数,因此总损失函数为:

![]() 表示训练集的大小,
表示训练集的大小, ![]() 错误类型的数量,Z由式(12)
错误类型的数量,Z由式(12)
整个 GCN-SA 中的网络层参数可以通过反向传播算法 [37] 进行迭代优化,最后通过更新参数来最小化损失函数。 所提出方法的实现算法在表 I 和 II 中。


B. Advantages of GCN-SA Method
1) Conparison Between GCN-SA and Model Based Fault Diagnosis Method:
基于模型的故障诊断方法的准确性很大程度上取决于模型的先验知识是否正确。
在GCN-SA方法中,将基于模型的方法的诊断结果转化为关联图,引入GCN,指导GCN训练
基于GCN本身可以从关联图(先验知识)和训练集中获得信息,理论上,即使GCN-SA不学习训练集中的任何只是,它仍然可以获得精度不低于SA方法的神经网络
2)Comparison Between GCN-SA Method and GCN Method:
传统GCN的缺点:
- 浅层 GCN 网络无法大规模传播标签信息(层越浅,节点的感受野越小)。
- 深度 GCN 网络会导致过度平滑问题。可以通过设置多层图 CNN 来增加感受野的大小。 然而,这种方法的缺点是数据集中的所有测量值在前向传输过程中会变得高度相似。通过这种方法训练的 GCN 的输出对于不同的输入数据几乎没有差异,这大大降低了分类精度。
GCN-SA可以缓解上述缺点,关联图G来自SA方法提供的预诊断结果![]()
关联图G由M个未连接的块(M是故障类型的数量)组成的图,任何块中的所有节点都是完全连接的,这确保了GCN可以获得关联图提供的所有信息,即使设置了浅GCN且感受野很小。
浅层图卷积网络足以获取关联图的所有信息,因此只需设置一层或两层图卷积网络,其他层仍然使用传统的神经网络框架,可以大大消除了过度平滑带来的问题。
3)Comparison Between GCN-SA Method and GCN-Based Fault DIagnosis Method
传统GCN-Based故障诊断方法,两个测量数据之间的关联关系确定根据每个测量的相似度,但以这种方式获得的关联关系并不是总是保证是正确的。

流形学习中一个常见的例子,在节点A和B似乎相隔很近,很容易被认为是一个关联关系的传统GCN-Based故障诊断方法,实际它们非常远,几乎没有联系。
传统的基于GCN方法中的关联图本质上是从数据集中的测量值导出的。不获取输入数据集以外的任何信息。
在GCN-SA中,SA方法被用来确定数据之间的关联关系。SA方法使用先验知识,因此SA很大程度上保证了生成关系的准确性;因为SA方法,不仅获得了输入信息包含的信息,还是用了SA方法中用于包含的关于模型的先验知识,可以获得更好的结果。图5中GCN-SA通过查找兴趣系统的仪器指令,可以获得实际工业系统的先验知识。

全面接收故障波形数据和兴趣系统的大量先验知识。

图1与图5的比较,图1传统的GCN-Based的故障诊断方法属于纯粹的基于数据的故障诊断方法,其所有信息源只是原始数据波形。
4)Introducting of Weight Coefficient θ:
引入系数θ来自适应调整先验知识对图卷积网络训练的影响,当训练集的规模较小时,侧重于从先验知识中获取信息,而当训练集规模足够大时,则侧重于从训练集本身获取信息,这样得到的拉普拉斯矩阵可以更好地指导神经网络的训练,在一定程度上提高网络在测试集中的准确率。
Experimental Study
- GCN-SA与其他故障诊断方法的有效性对比
- 验证权重系数θ对方法精度的积极影响
A. Data Description
实验平台:基于牵引系统脉冲整流器结构的dSPACE半实物仿真平台。由测试箱、PXI箱、cRIO机箱、实时仿真单元和上位机组成。信号调理系统由测试箱、PXI箱和cRIO箱组成,用于实现被测设备与实时模拟器之间的信号转换。实时模拟单元实现模拟运算,向外界提供传感器信号采样值。 通过dSPACE仿真模型和真实控制器,实现各种故障仿真和诊断方法。 整流器的主电路图如图6所示。

在仿真平台运行过程中,首先获得正常工作条件下的采样测量值。接下来,将五种故障注入平台,通过实时仿真单元获得故障条件下的传感器采样测量值。这五种故障包括:1)四象限输入电流传感器故障 ;2) 整流模块
;2) 整流模块![]() 断路故障
断路故障![]() ;3) 整流模块
;3) 整流模块![]() 断路故障F
断路故障F![]() ;4) 整流模块
;4) 整流模块![]() 断路故障
断路故障![]() ;5)整流模块
;5)整流模块![]() 开路故障
开路故障![]() 。原始故障数据波形通过传感器采样获得
。原始故障数据波形通过传感器采样获得![]()
采用滑动窗口法对原始数据进行分割,设置步长为8,窗口长度为256,这样得到2372个测量值。每次测量的维度为 ![]() ,总数据集的维度为
,总数据集的维度为![]() 。在这些测量中,各种故障类型的数量如表 III 所示。正常和五种故障条件下的测量波形如图 7 所示。
。在这些测量中,各种故障类型的数量如表 III 所示。正常和五种故障条件下的测量波形如图 7 所示。

B. Experimental Result to verify the Effectiveness of GCN-SA Method
1、GCN-SA方法在一定程度上实际上是GCN和SA方法的结合,因此有必要将其与这两种故障诊断方法进行比较,以证明结合方法优于任何单一的方法。
2、所提方法的神经网络模型中存在Conv1D层(见图2),训练了一个纯一维CNN,表明所提方法的优异性能来自于改进的GCN层 ,而不是 Conv1D 层。
3、构建一个 LSTM 网络进行故障诊断。 考虑到 LSTM 通常非常适合处理与时间序列高度相关的问题,以它为代表,将 GCN-SA 方法与其进行比较可以更好地体现所提方法的优越性。
1)Fault Diagnosis Based on SA
SA是上述五种方法中比较特殊的一种。作为一种基于模型的方法,其诊断准确性与训练集的大小无关。此外,它也是GCN-SA方法的重要组成部分,负责获取数据集的关联图。因此,首先进行基于SA的故障诊断实验。
根据图 6,得到牵引系统整流器的数学模型,如方程 e1-e19 所示。



在上述方程中,![]() 是整流器的理想开关函数
是整流器的理想开关函数

方程中其他变量的含义见表IV。

![]()

FD 和 FI 通过 DM 分解和 FI 矩阵进行分析。
从图8可以看到,所有的缺点都是位于右下角结构超定部分,所以所有的缺点都可以检测到。

然而,根据图9中,所有缺点都是相互耦合的,不能互相隔离。

结合整流器的结构特点,通过构造特殊的残差表达式来实现这五种故障的隔离:
首先,表V给出了IGBT开路故障条件下整流器开关函数![]() 的真实值。表中的
的真实值。表中的![]() 表示开路故障情况下
表示开路故障情况下![]() 的真实值
的真实值![]() ,表V中的其他参数与此类似。
,表V中的其他参数与此类似。

因此,可以发现单个IGBT故障的结果是唯一的。 基于以上认识,生成五个残差作为故障诊断的观测量度。各残差与各故障的对应关系如表六所示。根据对应关系表,故障诊断规则可在表七h1中列出∼ 规则表中的h5是判断相应残差是否异常的阈值,可由现场工程师给出


在上述五个残差中,R1反映了整流器的正常运行。当其值接近0时,表示与残值相关的故障不存在。R2–R5反映整流器的运行状态。如果FIGBT1–FIGBT4的值接近0,则表明存在与残值相关的故障。

由故障诊断规则表和SA方法的基本流程,得2372次测量的预诊断结果![]()
由于感兴趣系统的复杂性和噪声的干扰,本实验中SA方法的故障诊断准确率只能达到70.2%,诊断结果对应的混淆矩阵如图10所示。在预诊断结果 p 的基础上,根据第 III-A4 节构建数据集 X 的关联图 G。

2)Comparison of Several Methods:
- GCN-SA方法的网络模型包含2个GCN层、2个Conv1D层、2个全连接层、1个softmax层,
- 而1DCNN模型包含4个Conv1D层、2个全连接层、1个softmax层。
它们之间的区别仅在于是否使用了 GCN 层。
LSTM网络使用的隐藏层中的节点数为108,堆叠层数设置为3,输入层的尺寸为6,对应于每次测量的尺寸。所有2372项测量被随机分为训练集和测试集。为了评估每种方法的性能,进行了九组实验。
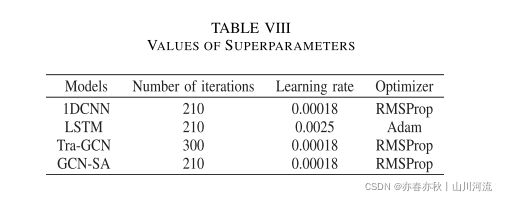
每组的训练集大小分别为8、16、32、64、128、256、384、512和640。鉴于实际情况,故障诊断处理中收集的数据集通常由大量未标记的测量值和少量标记的测量值组成,因此不增加训练集包含640个以上标记测量值的实验组。相关超参数值如表VIII所示。
为了消除实验的随机性,每个实验重复八次,故障诊断方法的准确率用八次测试集准确率的平均值表示。结果显示在图11和12中。
该表反映了输入不同大小的训练集时每种方法的故障诊断结果,包括最大精度(Max-acc)、最小精度(Minacc)和平均精度(Avg-acc)。 准确率反映了网络预测的成功率。 例如,当测试集的大小为1732且成功的网络预测数为1500时,网络预测精度为0.866。


从表 IX 可以看出,随着训练集规模的增加,四种神经网络方法在测试集上的准确率显着提高。在所有九组实验中,GCN-SA 方法的准确率均高于其他三种神经网络方法,并且在训练集规模较小时这一特点尤为明显,体现了 GCN 的巨大优势-SA 方法。在上述九组实验中,GCN-SA方法与其他三种方法最大的不同出现在第二组实验中。此时该方法的准确率为73.4%,其他三种方法的准确率均不足40%。如此巨大的精度差异完全是由系统的先验知识(即关联图)造成的。

通过分析Tra-GCN方法对应的曲线可以看出,Tra-GCN方法的准确率大部分时间都不低于1DCNN和LSTM方法,这体现了关联图的优势。 但是,当训练集包含的测量值不足时(第一组和第二组),与两种 DL 方法相比,它并没有优势,这种现象是完全可以理解的,原因是 Tra-GCN 方法仍然是一种 归根结底是数据驱动的诊断方法,其输入信息只包含原始数据波形,这就决定了当训练集的规模不够大时,GCN模型无法从训练集中获得足够的信息,因此其 准确率无法达到更高的值。
将GCN-SA方法与基于模型的SA方法进行了比较。可以发现,即使训练集的数量非常小(第一组),GCNSA方法的精度仍然不比SA方法低很多,当训练集的大小大于16时,GCN-SA方法的精度将比SA方法高得多。这种现象正好反映了GCN-SA方法的特点:它综合接收感兴趣系统的先验知识和采样数据,并训练神经网络进行诊断。当训练集太小时,感兴趣系统的先验知识足以确保方法的准确性不会太低;随着训练集规模的增加,采样测量部分将提供大量信息,这将使该方法的精度远远高于仅依赖先验知识的SA方法。
当训练集的大小为640时,通过GCN-SA方法训练的图卷积网络的预测如图13所示。图中的对角线表明,神经网络诊断结果与实际情况相符。从所得结果来看,GCN-SA在正常条件下对测量的分辨能力不足,这可能是由于正常条件下的测量量小和测量分布不平衡造成的,这将是未来研究工作的重点。此外,该网络对五种故障状态的诊断精度非常高。

3)Discussion on the Effect of θ
为了验证系数 θ 的影响,构建了两个 GCN-SA 神经网络模型(network1 和 network2)。两个模型的结构、迭代次数和学习率与第 IV-B 节中的 GCN-SA 神经网络模型完全相同,两个网络之间的唯一区别是:
network1的GCN层的前向传递公式为![]() ,其中θ=ekr,其他变量的含义在第III-A5节介绍 。
,其中θ=ekr,其他变量的含义在第III-A5节介绍 。
network2的图卷积网络层的前向传递公式[24]为![]() ,
,![]() 10。考虑到当训练集的大小较小,
10。考虑到当训练集的大小较小,![]() ,此时network1的网络前向传递公式退化为
,此时network1的网络前向传递公式退化为 ,与network2的公式一致。因此,设置了四组实验。每组训练集的大小分别为 96、128、256 和 384,对应的 θ 分别为 1.499、1.715、2.942 和 5.047。实验结果如图 14 所示。
,与network2的公式一致。因此,设置了四组实验。每组训练集的大小分别为 96、128、256 和 384,对应的 θ 分别为 1.499、1.715、2.942 和 5.047。实验结果如图 14 所示。

实验结果表明,当训练集包含超过 96 个测量值时,即使不引入系数 θ,GCN-SA 方法也可以获得非常高的准确率。但是,通过引入权重系数θ,可以进一步提高该方法的准确性。实验结果表明:当训练集的规模足够大时,对提高网络准确率有很大贡献的信息来自于标注的训练集,而不是先验知识。此时自适应权重系数θ的取值可以有效提高网络的诊断准确率。
ConClusion
基于现有GCN模型的基础上,提出了基于结构分析的GCN故障诊断方法
优点:
- 利用测量中包含的信息和兴趣系统的先验结构只是,使诊断模型能够综合获取这两部分的信息;
- 建立了半监督故障诊断模型,实现了部分故障标签下的故障诊断;
- 引入权重系数,自适应调整两部分信息对诊断模型的影响。
改进方向:
- GraphSAGE模型可以用来代替当前的GCN模型,GraphSAGE属于归纳学习模式,可以直接聚合图G中某个节点及其邻居所表示的数据。新模型可以应对数据集的图发生变化的情况,并在一定程度上提高模型性能。
- 故障样本的获取不平衡,解决样本不平衡对所提方法的影响也是值得解决的。