Python-霍夫直线检测、霍夫圆检测代码实现
上一篇文章介绍了霍夫直线检测和霍夫圆检测的原理,这篇文章主要是python实现霍夫直线检测、霍夫圆检测。
霍夫直线检测代码实现
使用HoughLines和HoughLinesP两种函数实现霍夫直线检测。
import cv2 as cv
import numpy as np
def line_detection(image): # 直线检测
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray, 120, 255, apertureSize=3) # apertureSize是sobel算子窗口大小
lines = cv.HoughLines(edges, 1, np.pi / 180, 300) # 指定步长为1的半径和步长为π/180的角来搜索所有可能的直线
"""
HoughLines(image, rho, theta, threshold, lines=None, srn=None, stn=None, min_theta=None, max_theta=None)
第一个参数image:是canny边缘检测后的图像
第二个参数rho和第三个参数theta:对应直线搜索的步长。在本例中,函数将通过步长为1的半径和步长为π/180的角来搜索所有可能的直线。
最后一个参数threshold:是经过某一点曲线的数量的阈值,超过这个阈值,就表示这个交点所代表的参数对(rho, theta)在原图像中为一条直线
"""
# 将求得交点坐标反代换进行直线绘制
for line in lines:
# print(type(lines))
rho, theta = line[0] # 获取极值ρ长度和θ角度
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho # 获取x轴值
y0 = b * rho
x1 = int(x0 + 1000 * (-b)) # 获取这条直线最大值点x1
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a)) # 获取这条直线最小值点y2 其中*1000是内部规则/
cv.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2) # 划线
cv.imshow("image-lines", image)
def line_detect_possible_demo(image): # 检测出可能的线段
gray = cv.cvtColor(image, cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray, 120, 255, apertureSize=3)
lines = cv.HoughLinesP(edges, 1, np.pi / 180, 20, minLineLength=10, maxLineGap=10)
"""
HoughLinesP概率霍夫变换(是加强版)使用简单,效果更好,检测图像中分段的直线(而不是贯穿整个图像的直线)
第一个参数是需要处理的原图像,该图像必须为cannay边缘检测后的图像;
第二和第三参数:步长为1的半径和步长为π/180的角来搜索所有可能的直线
第四个参数是阈值,概念同霍夫变换
第五个参数:minLineLength-线的最短长度,比这个线短的都会被忽略。
第六个参数:maxLineGap-两条线之间的最大间隔,如果小于此值,这两条线就会被看成一条线
"""
for line in lines:
# print(type(line))
x1, y1, x2, y2 = line[0]
cv.line(image, (x1, y1), (x2, y2), (0, 0, 255), 2)
cv.imshow("line_detect_possible_demo", image)
src = cv.imread("qipan.jpg")
cv.namedWindow("input image", cv.WINDOW_AUTOSIZE)
cv.imshow("input image", src)
line_detection(src.copy())
line_detect_possible_demo(src.copy())
cv.waitKey(0)
cv.destroyAllWindows()
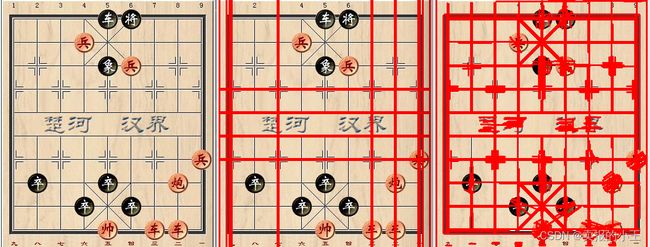
从左到右分别为:原图、HoughLines执行结果、HoughLinesP执行结果。对比来看HoughLinesP概率霍夫变换会检测到更多的直线。
霍夫圆检测代码实现
使用HoughCircles实现霍夫圆检测,并演示 minDist 的值对检测效果的影响。
import cv2
src = cv2.imread('qipan.jpg')
cv2.imshow('src_img',src)
gray=cv2.cvtColor(src,cv2.COLOR_BGR2GRAY)
# 输出图像大小,方便根据图像大小调节minRadius和maxRadius
# 演示 minDist 的值对检测效果的影响
minDists = [10,25,50]
imgcopy = [src.copy(),src.copy(),src.copy()]
for minDist,imgcopy in zip(minDists,imgcopy):
circles= cv2.HoughCircles(gray,cv2.HOUGH_GRADIENT,dp=1,minDist=minDist,param1=100,param2=30,minRadius=15,maxRadius=20)
print('circles',circles) # 查看返回值
print('len(circles[0])',len(circles[0])) # 输出检测到圆的个数
print('-------------------------------------')
for circle in circles[0]:
x=int(circle[0]) # 坐标行列
y=int(circle[1])
r=int(circle[2]) # 半径
img=cv2.circle(imgcopy,(x,y),r,(0,0,255),2) # 在原图用指定颜色标记出圆的位置
cv2.imshow('circle_img_'+str(minDist),img) # 显示新图像
cv2.waitKey(0)
cv2.destroyAllWindows()
从左到右分别为:minDist = 10、25、50的运行结果。可以看到minDist值越大检测到的圆越少。
