PyTorch学习笔记(13)--现有网络模型的使用及修改
PyTorch学习笔记(13)–现有网络模型的使用及修改
本博文是PyTorch的学习笔记,第13次内容记录,主要介绍如何使用现有的神经网络模型,如何修改现有的网络模型。
目录
- PyTorch学习笔记(13)--现有网络模型的使用及修改
- 1.现有网络模型
- 2.现有模型的使用
-
- 2.1VGG16模型的结构
- 2.2修改现有VGG16模型的结构
- 3.学习小结
1.现有网络模型
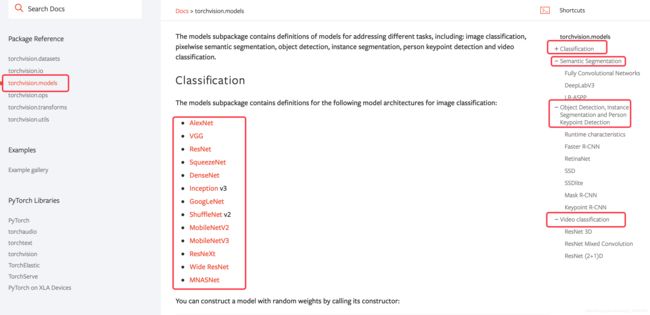
在现有的torchvision中提供了许多常见的神经网络模型,这些模型主要包括:分类、语义分割、目标检测、视频分类等类型,其中分类主要针对图像分类,包括AlexNet、VGG、ResNet、GoogLeNet等网络。具体情况可以参照PyTorch官网。详情如下截图所示:
2.现有模型的使用
2.1VGG16模型的结构
现以ImageNet数据集为例,神经网络选取VGG16,具体细节请参照PyTorch官网,VGG16的模型参数如下所示:

VGG16的函数定义结构为:torchvision.models.vgg16_bn(pretrained: bool = False, progress: bool = True, **kwargs: Any) → torchvision.models.vgg.VGG。其中pretrained参数表示是否使用已预训练的模型参数。通过代码调用现有VGG16模型如下:
import torchvision
vgg16_false = torchvision.models.vgg16(pretrained=False)
vgg16_true = torchvision.models.vgg16(pretrained=True)
print(vgg16_true)
该代码运行结果为输出vgg16模型的基本结构,但是一开始需要下载vgg16的模型文件,大小为528M,下载时间较长,代码运行效果如下所示:
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
)
从上述运行结果可知:VGG16网络是由13层卷积层和3层全连接层组成,最后网络输出一共有1000个分类结果。
2.2修改现有VGG16模型的结构
在VGG16模型后增加一个线性层,实现将VGG16的1000个类别输出为CIFAR10的10个类别,代码如下:
# coding :UTF-8
# 文件功能: 代码实现预训练模型的功能
# 开发人员: dpp
# 开发时间: 2021/8/18 6:45 下午
# 文件名称: model_pretrained.py
# 开发工具: PyCharm
import torchvision
# train_data = torchvision.datasets.ImageNet("ImageNet", split="train", download=True,
# transform=torchvision.transforms.ToTensor())
from torch import nn
vgg16_false = torchvision.models.vgg16(pretrained=False)
vgg16_true = torchvision.models.vgg16(pretrained=True)
print(vgg16_true)
# 如何利用现有VGG16结构实现CIFAR10的10个类别的输出 在原有VGG16结构后面增加一层线性层
train_data = torchvision.datasets.CIFAR10("CIFAR10", train=True, transform=torchvision.transforms.ToTensor(),
download=True)
vgg16_true.add_module("add_linear", nn.Linear(1000, 10)) # in_features = 1000 out_features = 10
print(vgg16_true)
上述代码输出结果为如下,从输出结果能看出与原VGG16网络相比,最后增加了一层线性层Linear。
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
)
(add_linear): Linear(in_features=1000, out_features=10, bias=True) #增加的线性层 Linear
)
如果想将最后的线性层加在classifier中,则将代码修改如下:
# coding :UTF-8
# 文件功能: 代码实现预训练模型的功能
# 开发人员: dpp
# 开发时间: 2021/8/18 6:45 下午
# 文件名称: model_pretrained.py
# 开发工具: PyCharm
import torchvision
# train_data = torchvision.datasets.ImageNet("ImageNet", split="train", download=True,
# transform=torchvision.transforms.ToTensor())
from torch import nn
vgg16_false = torchvision.models.vgg16(pretrained=False)
vgg16_true = torchvision.models.vgg16(pretrained=True)
print(vgg16_true)
# 如何利用现有VGG16结构实现CIFAR10的10个类别的输出 在原有VGG16结构后面增加一层线性层
train_data = torchvision.datasets.CIFAR10("CIFAR10", train=True,
transform=torchvision.transforms.ToTensor(),
download=True)
vgg16_true.classifier.add_module("add_linear", nn.Linear(1000, 10)) # in_features = 1000 out_features = 10
print(vgg16_true)
将线性层Linear加在classifier中,输出结果为:
VGG(
(features): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): ReLU(inplace=True)
(2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(3): ReLU(inplace=True)
(4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(6): ReLU(inplace=True)
(7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(8): ReLU(inplace=True)
(9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(11): ReLU(inplace=True)
(12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(13): ReLU(inplace=True)
(14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(15): ReLU(inplace=True)
(16): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(17): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(18): ReLU(inplace=True)
(19): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(20): ReLU(inplace=True)
(21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(22): ReLU(inplace=True)
(23): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(24): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(25): ReLU(inplace=True)
(26): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(27): ReLU(inplace=True)
(28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(29): ReLU(inplace=True)
(30): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(avgpool): AdaptiveAvgPool2d(output_size=(7, 7))
(classifier): Sequential(
(0): Linear(in_features=25088, out_features=4096, bias=True)
(1): ReLU(inplace=True)
(2): Dropout(p=0.5, inplace=False)
(3): Linear(in_features=4096, out_features=4096, bias=True)
(4): ReLU(inplace=True)
(5): Dropout(p=0.5, inplace=False)
(6): Linear(in_features=4096, out_features=1000, bias=True)
(add_linear): Linear(in_features=1000, out_features=10, bias=True)
)
)
3.学习小结
在本文重点讲解了现有神经网络模型的使用和修改方法,在已有模型的基础上搭建自己的模型,是十分方便的。在一下一篇博文,将介绍如何保存和读取网络模型。