Rosbridge系列2:初识Rosbridge--利用rosbridge实现网页控制小乌龟移动
1.环境
本例程机器人端采用Ubuntu16.04+ROS Kinetic版本,网页端Win10+Firefox浏览器。
2.准备工作
step1,安装rosbridge功能包:在机器人端假设已安装成功ros系统,执行:
sudo apt-get install ros-kinetic-rosbridge-suite
step2,准备网页代码:将以下代码复制到文本文件中,并命名为 turtlewebcontrol.html(注意后缀名要改)
<html>
<head>
<meta charset="utf-8" />
<script type="text/javascript" src="http://static.robotwebtools.org/EventEmitter2/current/eventemitter2.min.js">script>
<script type="text/javascript" src="http://static.robotwebtools.org/roslibjs/current/roslib.min.js">script>
<style type="text/css">
#box1{
width: 44px;
height:44px;
position: absolute;
background: lightskyblue;
}
style>
<script type="text/javascript" type="text/javascript">
// Connecting to ROS
var ros = new ROSLIB.Ros({
url : 'ws://localhost:9090'
});
var isconected=false;
//判断是否连接成功并输出相应的提示消息到web控制台
ros.on('connection', function() {
isconected=true;
console.log('Connected to websocket server.');
subscribe();
});
ros.on('error', function(error) {
isconected=false;
console.log('Error connecting to websocket server: ', error);
});
ros.on('close', function() {
isconected=false;
console.log('Connection to websocket server closed.');
unsubscribe();
});
// Publishing a Topic
var cmdVel = new ROSLIB.Topic({
ros : ros,
name : 'turtle1/cmd_vel',
messageType : 'geometry_msgs/Twist'
});//创建一个topic,它的名字是'/cmd_vel',,消息类型是'geometry_msgs/Twist'
var twist = new ROSLIB.Message({
linear : {
x : 0.0,
y : 0.0,
z : 0.0
},
angular : {
x : 0.0,
y : 0.0,
z : 0.0
}
});//创建一个message
function control_move(direction){
twist.linear.x = 0.0;
twist.linear.y = 0;
twist.linear.z = 0;
twist.angular.x = 0;
twist.angular.y = 0;
twist.angular.z = 0.0;
switch(direction){
case 'up':
twist.linear.x = 2.0;
break;
case 'down':
twist.linear.x = -2.0;
break;
case 'left':
twist.angular.z = 2.0;
break;
case 'right':
twist.angular.z = -2.0;
break;
}
cmdVel.publish(twist);//发布twist消息
}
var timer=null;
function buttonmove(){
var oUp=document.getElementById('up');
var oDown=document.getElementById('down');
var oLeft=document.getElementById('left');
var oRight=document.getElementById('right');
oUp.onmousedown=function ()
{
Move('up');
}
oDown.onmousedown=function ()
{
Move('down');
}
oLeft.onmousedown=function ()
{
Move('left');
}
oRight.onmousedown=function ()
{
Move('right');
}
oUp.onmouseup=oDown.onmouseup=oLeft.onmouseup=oRight.onmouseup=function ()
{
MouseUp ();
}
}
function keymove (event) {
event = event || window.event;/*||为或语句,当IE不能识别event时候,就执行window.event 赋值*/
console.log(event.keyCode);
switch (event.keyCode){/*keyCode:字母和数字键的键码值*/
/*65,87,68,83分别对应awds*/
case 65:
Move('left');
break;
case 87:
Move('up');
break;
case 68:
Move('right');
break;
case 83:
Move('down');
break;
default:
break;
}
}
var MoveTime=20;
function Move (f){
clearInterval(timer);
timer=setInterval(function (){
control_move(f)
},MoveTime);
}
function MouseUp ()
{
clearInterval(timer);
}
function KeyUp(event){
MouseUp();
}
window.onload=function ()
{
buttonmove();
document.onkeyup=KeyUp;
document.onkeydown=keymove;
Movebox();
}
// Subscribing to a Topic
var listener = new ROSLIB.Topic({
ros : ros,
name : '/turtle1/pose',
messageType : 'turtlesim/Pose'
});//创建一个topic,它的名字是'/turtle1/pose',,消息类型是'turtlesim/Pose',用于接收乌龟位置信息
var turtle_x=0.0;
var turtle_y=0.0;
function subscribe()//在连接成功后,控制div的位置,
{
listener.subscribe(function(message) {
turtle_x=message.x;
turtle_y=message.y;
document.getElementById("output").innerHTML = ('Received message on ' + listener.name +' x: ' + message.x+" ,y: "+message.y);
});
}
function unsubscribe()//在断开连接后,取消订阅
{
listener.unsubscribe();
}
function Movebox ()
{
var obox=document.getElementById("box1");
var timer=null;
clearInterval(timer);
timer=setInterval(function (){
if(!isconected)
{
obox.style.left = '0px';
obox.style.top = '0px';
} else {
obox.style.left =Math.round(60*turtle_x)-330+"px";
console.log(obox.style.left)
obox.style.top =330-Math.round(60*turtle_y)+"px";
console.log(obox.style.top)
}
},20);
}
script>
head>
<body>
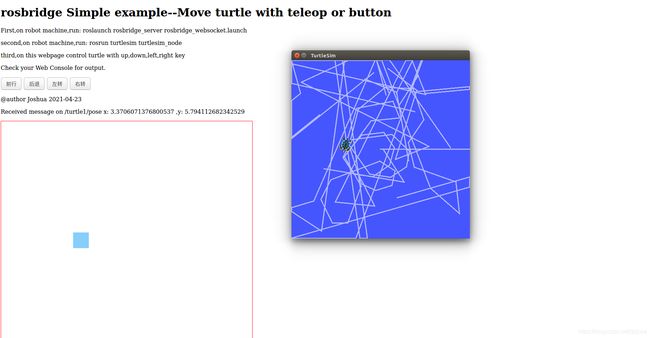
<h1>rosbridge Simple example--Move turtle with teleop or button h1>
<p>First,on robot machine,run: roslaunch rosbridge_server rosbridge_websocket.launchp>
<p>second,on robot machine,run: rosrun turtlesim turtlesim_nodep>
<p>third,on this webpage control turtle with up,down,left,right keyp>
<p>Check your Web Console for output.p>
<input type="button" value="前行" id="up">
<input type="button" value="后退" id="down">
<input type="button" value="左转" id="left">
<input type="button" value="右转" id="right">
<p>@author Joshua 2021-04-23p>
p>
<div id="mbox" style="width:704px;height:704px;border:1px solid red;position: relative;">
<div id="box1" style="margin-left:330px;margin-top:330px;position:absolute;" >div>
div>
body>
html>
注意修改机器人的地址,
var ros = new ROSLIB.Ros({
url : 'ws://localhost:9090'
});
其中,ws://localhost:9090 是指连接本机的rosbridge默认端口9090,如果网页布局在其它电脑上,需要指定机器人的ip地址及端口,比如
url : 'ws://192.168.1.5:9090'
3.操作
step1:按照网页所示,在机器人终端运行:
roslaunch rosbridge_server rosbridge_websocket.launch
启动roscore及rosbridge server
step2:按照网页所示,在机器人终端运行:
rosrun turtlesim turtlesim_node
启动乌龟界面
step3:利用firefox打开或者刷新刚才的文件:turtlewebcontrol.html.
step4: 点击网页上的前行,后退,左转,右转按钮,或者键盘的 W,S,A,D按键控制小乌龟移动,可以看到机器人端的小乌龟移动,同时乌龟的位置实时更新在网页上。