【Package】RosBridge——打通Ros与非Ros环境的数据壁垒 #2 C++端实现功能ppianpak / rosbridgecpp
1 概览
在上一篇文章【Package】RosBridge——打通Ros与非Ros环境的数据壁垒 中,我介绍了如何通过RosBridge来进行非Ros与Ros系统之间的数据通信,并且实现了一半的通信架构,即图片的左半部分,这一篇,我会通过介绍GitHub上的开源项目ppianpak / rosbridgecpp来实现架构的右半部分,测试完整的通信结构效果。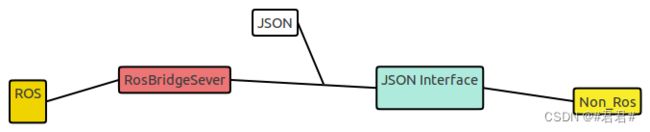
ppianpak / rosbridgecpp实现了一个高效基于C++的与RosBridge通信的Client,使用rapidjson来进行json相关操作。该包纯包含头文件,不需要其他依赖,移植起来非常方便,需要CMake3.0+。下面来看看如何使用。
2 使用
ppianpak / rosbridgecpp包的文件结构如下:
其中,rosbridge_ws_client.cpp和rosbridge_ws_client.hpp实现了一个简单的demo,包括的功能有Topic订阅与发布,service的订阅与发布,下面来看看代码:
/*
* Created on: Apr 16, 2018
* Author: Poom Pianpak
*/
#include "rosbridge_ws_client.hpp"
#include
RosbridgeWsClient rbc("localhost:9090");
void advertiseServiceCallback(std::shared_ptr /*connection*/, std::shared_ptr in_message)
{
// message->string() is destructive, so we have to buffer it first
std::string messagebuf = in_message->string();
std::cout << "advertiseServiceCallback(): Message Received: " << messagebuf << std::endl;
rapidjson::Document document;
if (document.Parse(messagebuf.c_str()).HasParseError())
{
std::cerr << "advertiseServiceCallback(): Error in parsing service request message: " << messagebuf << std::endl;
return;
}
rapidjson::Document values(rapidjson::kObjectType);
rapidjson::Document::AllocatorType& allocator = values.GetAllocator();
values.AddMember("success", document["args"]["data"].GetBool(), allocator);
values.AddMember("message", "from advertiseServiceCallback", allocator);
rbc.serviceResponse(document["service"].GetString(), document["id"].GetString(), true, values);
}
void callServiceCallback(std::shared_ptr connection, std::shared_ptr in_message)
{
std::cout << "serviceResponseCallback(): Message Received: " << in_message->string() << std::endl;
connection->send_close(1000);
}
void publisherThread(RosbridgeWsClient& rbc, const std::future& futureObj)
{
rbc.addClient("topic_publisher");
rapidjson::Document d;
d.SetObject();
d.AddMember("data", "Test message from /ztopic", d.GetAllocator());
while (futureObj.wait_for(std::chrono::milliseconds(1)) == std::future_status::timeout)
{
rbc.publish("/ztopic", d);
std::this_thread::sleep_for(std::chrono::milliseconds(1000));
}
std::cout << "publisherThread stops()" << std::endl;
}
void subscriberCallback(std::shared_ptr /*connection*/, std::shared_ptr in_message)
{
std::cout << "subscriberCallback(): Message Received: " << in_message->string() << std::endl;
}
int main() {
rbc.addClient("service_advertiser");
rbc.advertiseService("service_advertiser", "/zservice", "std_srvs/SetBool", advertiseServiceCallback);
rbc.addClient("topic_advertiser");
rbc.advertise("topic_advertiser", "/ztopic", "std_msgs/String");
rbc.addClient("topic_subscriber");
rbc.subscribe("topic_subscriber", "/ztopic", subscriberCallback);
// Test calling a service
rapidjson::Document document(rapidjson::kObjectType);
document.AddMember("data", true, document.GetAllocator());
rbc.callService("/zservice", callServiceCallback, document);
// Test creating and stopping a publisher
{
// Create a std::promise object
std::promise exitSignal;
// Fetch std::future object associated with promise
std::future futureObj = exitSignal.get_future();
// Starting Thread & move the future object in lambda function by reference
std::thread th(&publisherThread, std::ref(rbc), std::cref(futureObj));
// Wait for 10 sec
std::this_thread::sleep_for(std::chrono::seconds(10));
std::cout << "Asking publisherThread to Stop" << std::endl;
// Set the value in promise
exitSignal.set_value();
// Wait for thread to join
th.join();
}
// Test removing clients
rbc.removeClient("service_advertiser");
rbc.removeClient("topic_advertiser");
rbc.removeClient("topic_subscriber");
std::cout << "Program terminated" << std::endl;
} 分布解读下主要部分:
RosbridgeWsClient rbc("localhost:9090");初始化对象rbc,构造参数需要设置成之前RosBridge中的对应ip,如果本机测试就使用localhost即可。
然后给出了自定义的Service和Topic操作定义:
void advertiseServiceCallback(std::shared_ptr /*connection*/, std::shared_ptr in_message)
void callServiceCallback(std::shared_ptr connection, std::shared_ptr in_message)
void subscriberCallback(std::shared_ptr /*connection*/, std::shared_ptr in_message)
void publisherThread(RosbridgeWsClient& rbc, const std::future& futureObj) 在使用中需要注意的是,每个相关操作都需要新生成一个线程并给出对应的ClientName:
rbc.addClient("service_advertiser");
rbc.addClient("topic_advertiser");
rbc.addClient("topic_subscriber");在类的内部,作者维护了一个map可以查询到名字和Client的对应关系,因此之后对client的操作就是提供注册时的clientName即可。
然后给出Client相应操作的配置:
rbc.advertise("topic_advertiser", "/ztopic", "std_msgs/String");这个既是注册名字为“topic_advertiser”的client是发布topic用的,其中发布的topic名为/ztopic,数据类型是std_msgs/String。这样一个操作就注册好了,需要注意的是,clientName需要唯一,之后的操作如果不在这里注册也是无法使用的。
同样的,订阅话题的方法如下:
rbc.subscribe("topic_subscriber", "/ztopic", subscriberCallback);然后,作者在代码段中给出了一个发布10秒话题并结束Client的操作示例:
// Test creating and stopping a publisher
{
// Create a std::promise object
std::promise exitSignal;
// Fetch std::future object associated with promise
std::future futureObj = exitSignal.get_future();
// Starting Thread & move the future object in lambda function by reference
std::thread th(&publisherThread, std::ref(rbc), std::cref(futureObj));
// Wait for 10 sec
std::this_thread::sleep_for(std::chrono::seconds(10));
std::cout << "Asking publisherThread to Stop" << std::endl;
// Set the value in promise
exitSignal.set_value();
// Wait for thread to join
th.join();
} 如果想要循环发布,就使用
rapidjson::Document d;
d.SetObject();
d.AddMember("data", "Test message from /ztopic", d.GetAllocator());
while (true)
{
rbc.publish("/ztopic", d,"topic_advertiser");
usleep(1000000);
}
其中,话题和clientName要与之前注册的时候符合,d是rapidjson中的document对象,其中保存了包装好的json数据。
3 效果
编译后打开【Package】RosBridge——打通Ros与非Ros环境的数据壁垒 中介绍的roslaunch并运行rosbridge_ws_client即可实现开头给出的通信架构:
上图实现了topic“/ztopic” 的“自攻自受”,并且运行了10秒后停止了发送。可以看到发送的数据被订阅的线程又接收了回来。
下图是在无ros环境中发送虚拟的激光数据并在ros环境中接收的运行结果,发送和接收在局域网中不同的机器上: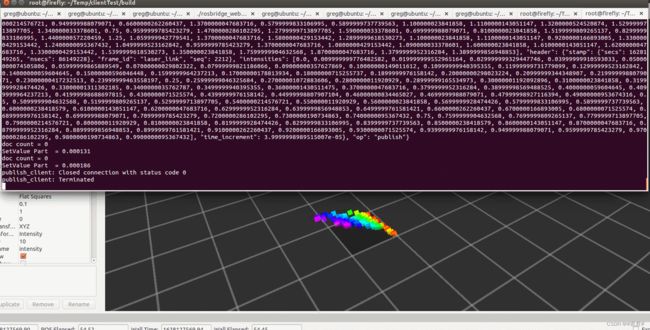
可以看到这个架构运行效果还是可以的,当需要调试显示或者其他的ros工具时,可以发送至ros环境中进行快速调试。