吴恩达机器学习打卡day4
本系列文档按课程视频的章节(P+第几集)进行分类,记录了学习时的一些知识点,方便自己复习。
课程视频P32——分类
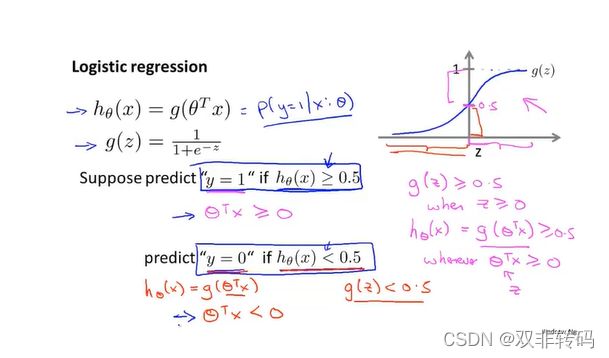
图1 表示最基础的分类原理,当类别只有0,1两种情况时,以0.5为阈值(threshold,当 h θ ( x ) h_{\theta}(x) hθ(x)超过0.5时,就判定为1,否则为0。

但是这种方式过于“一刀切”,如图2 ,当出现一个很横坐标 h θ ( x ) h_{\theta}(x) hθ(x)很大的数据时,预测曲线就不得不为了“迁就”它而发生很大改变,导致容易出现很大的误差。
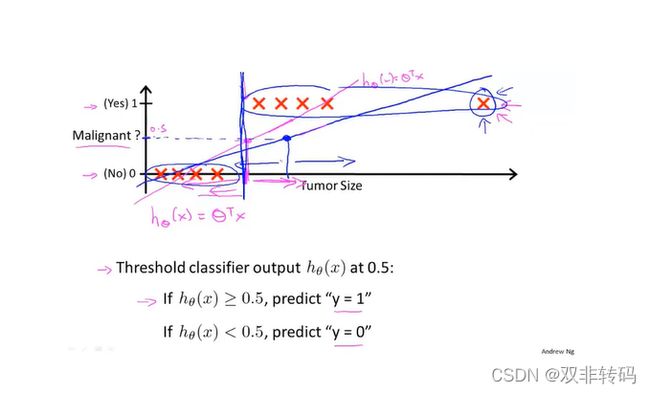
因此,最好的方法是在做这种0,1分类时,最好将 h θ ( x ) h_{\theta}(x) hθ(x)的值预先特征缩放到(0,1)的范围内。
课程视频P33
图4 表示了除了线性曲线外的另一种代价函数 h θ ( x ) h_{\theta}(x) hθ(x)形式,称为log函数(Logistic funtion), 其可将 h θ ( x ) h_{\theta}(x) hθ(x)的值域限制在(0,1)范围内。
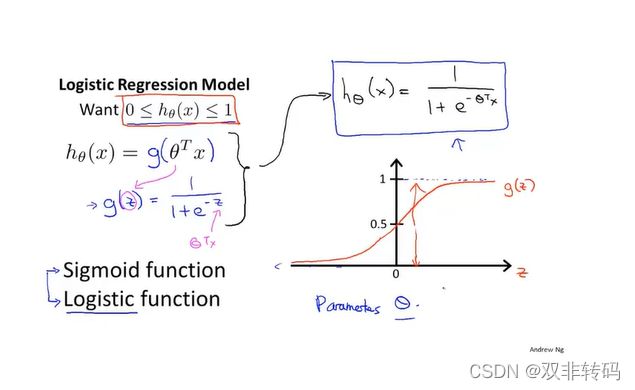
*除了 h θ ( x ) h_{\theta}(x) hθ(x)的函数表达式变化之后,其他都不变,同样可以用矩阵和向量的形式来表示其关系。
课程视频P34——决策界限(Decision boundary)
** 同样表示最基础的分类原理,当类别只有0,1两种情况时,以0.5为阈值(threshold,当 h θ ( x ) h_{\theta}(x) hθ(x)超过0.5时,就判定为1,否则为0。**
** 图7 表示了决策界限(Decision boundary), 以一条线即可完美分类,线的上侧是一类,下侧是另一类。**
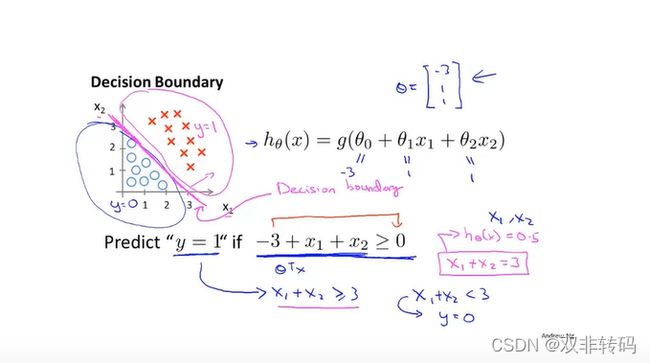
图8 展示了另一种情况下的决策界限(Decision boundary), 以一条线即可完美分类,线的内侧是一类,外侧是另一类。。

课程视频P35——代价函数
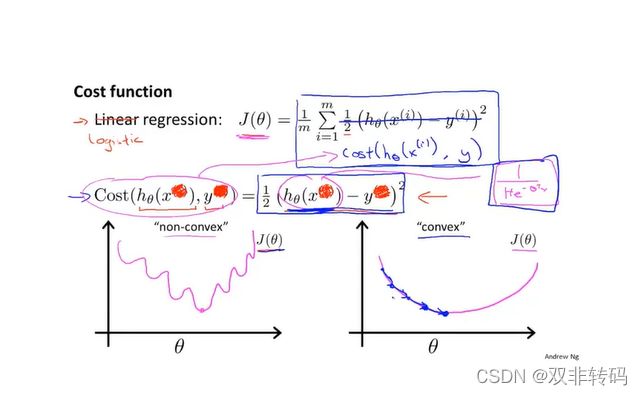
当代价函数为线性函数(Liner function), 若函数表达式中含有2次方,则容易存在代价函数图像为图9 左边那幅图像,此函数图像为非凸函数,因此在梯度下降法的迭代过程中,容易陷入局部最优解;而如果将代价函数写成log函数(Logistic function), 则代价函数图像为图9 右边那幅图像,此函数图像为凸函数,更易于使用梯度下降法迭代从而得到全局最优解。
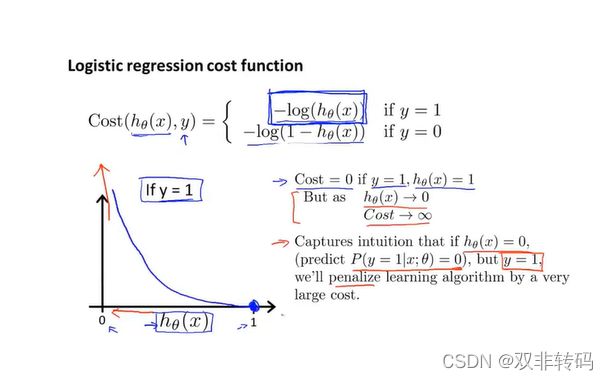
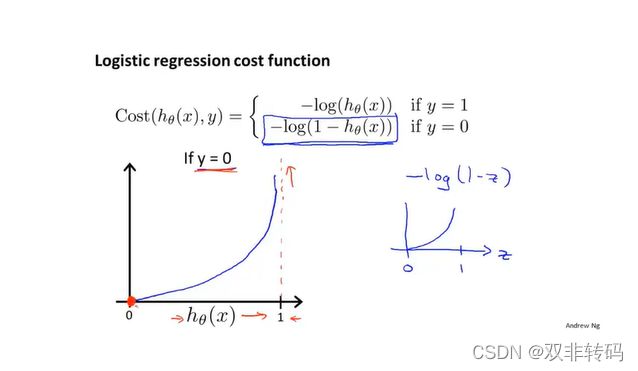
可以用 − l o g h θ ( x ) -logh_\theta(x) −loghθ(x)和 − l o g ( 1 − h θ ( x ) ) -log(1-h_\theta(x)) −log(1−hθ(x))来分别表示当真实值为y=1或y=0时的代价函数情况,如图10 图像所示,横坐标代表预测值,纵坐标代表代价函数值(可视为惩罚程度值)。此时真实值y=1的,若预测值越靠近1,说明越准确,对应的代价函数值(惩罚程度值)也越小,当预测值为1时,代价函数值(惩罚程度值)为0;若预测值越靠近0,说明越不准确,对应的代价函数值(惩罚程度值)也越大,当预测值为0时,代价函数值(惩罚程度值)为无穷大。
如图11图像所示,横坐标代表预测值,纵坐标代表代价函数值(可视为惩罚程度值)。此时真实值y=0的,若预测值越靠近0,说明越准确,对应的代价函数值(惩罚程度值)也越小,当预测值为0时,代价函数值(惩罚程度值)为0;若预测值越靠近0,说明越不准确,对应的代价函数值(惩罚程度值)也越大,当预测值为1时,代价函数值(惩罚程度值)为无穷大。
课程视频P36——简化代价函数和梯度下降
可以用图12所示的一个式子就同时表示了当真实值为y=1或y=0时的对应人代价函数 − l o g h θ ( x ) -logh_\theta(x) −loghθ(x)和 − l o g ( 1 − h θ ( x ) ) -log(1-h_\theta(x)) −log(1−hθ(x))情况,当y=1时,式子后半截就等于0,式子为 − l o g h θ ( x ) -logh_\theta(x) −loghθ(x);当y=0时,式子前半截就等于0,式子为 − l o g ( 1 − h θ ( x ) ) -log(1-h_\theta(x)) −log(1−hθ(x))。
(此处主要演示手推,清晰的打印公式可见图12 )
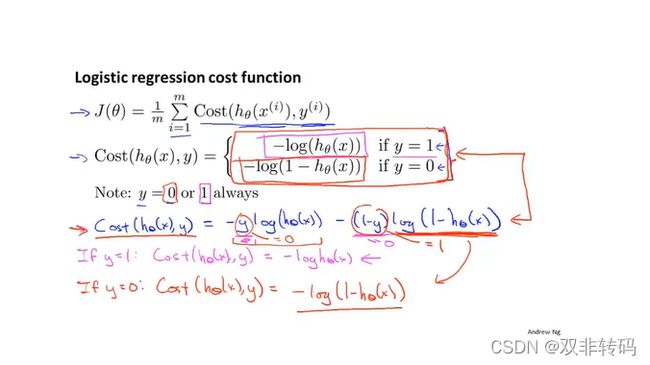
**图13 清晰的展示了上述公式。 **
课程视频P37——高级优化
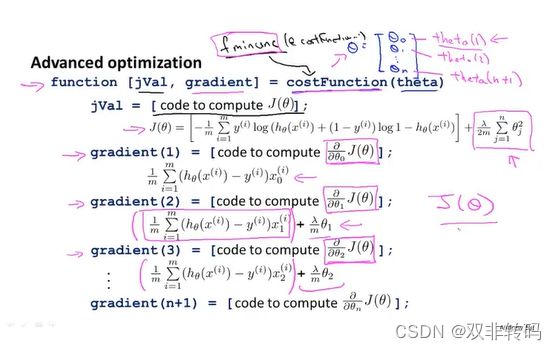
除了梯度下降法之外,常用的还有图14 中呈现的Conjugate gradient, BFGS, L-BFGS三种方法,他们的有点是不用再手动调整并选择 α \alpha α,同时收敛速度比一般的梯度下降法要更快。但是,它也存在算法过于复杂的问题,小白的话(比如在下)一般要花几个星期甚至数月去感受学习,所以就暂时不用管它,知道世界上有这么个算法就行。

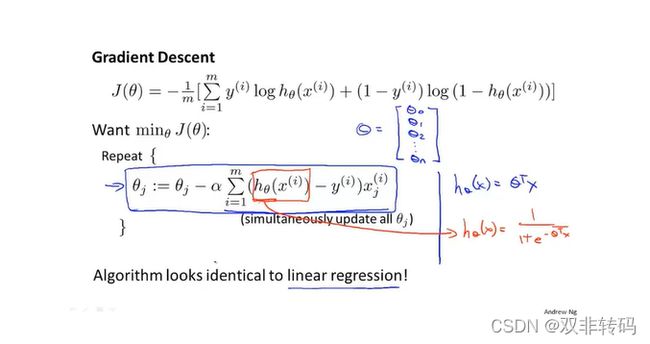
图15 展示了梯度下降法求偏导时的一些编程过程。
续接上图。

课程视频P38——多元分类:一对多
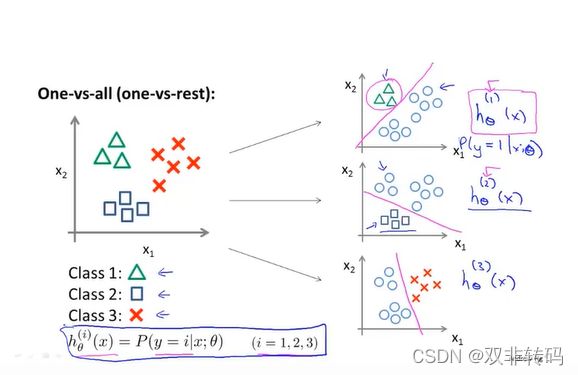
除了之前提到了二分类用0,1来表示之外,还可以用1,2,3,4…来表示具有多个特征的分类情况。

图18表示了对具有三种特征的元素进行分类的方法,选定其中一种类型元素(将其他元素看作一团),用二分类的方法从所有样本中判别出选定的那一种类型的元素;换一种选定元素,再重复以上操作三次;总共三次操作,即可完成对具有三种特征的元素进行分类。
课程视频P39——过拟合(Overfit)问题
图19 中三幅图像从左右边分别表示欠拟合(Underfit),刚好拟合和过拟合问题(Overfit)。一般认为,欠拟合还容易解决,而过拟合是比较麻烦的问题,表现为函数过分追求与训练数据去贴合,关注了一些可能我们不看重的指标,导致泛化(generalize)性比较差,当将训练后的算法用于测试集时,表现往往不如人意。
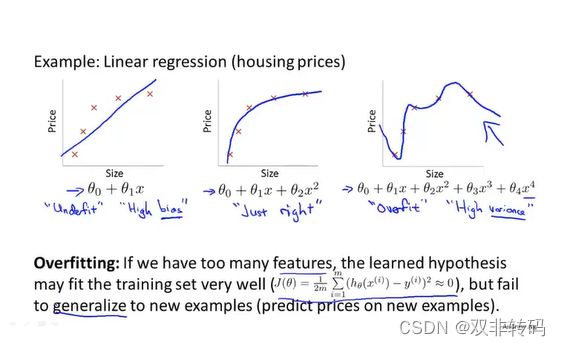
图20中三幅图像从左右边分别表示欠拟合,刚好拟合和过拟合问题。
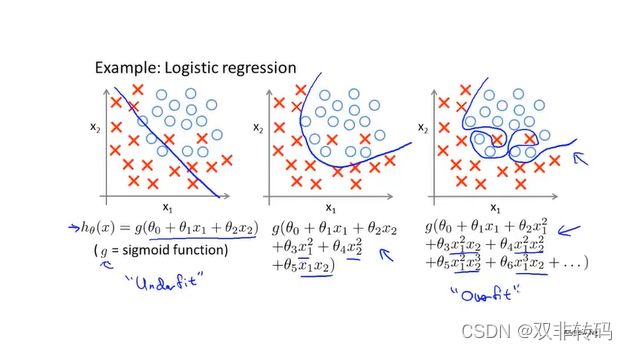
图21 形象的表现为函数过分追求与训练数据去贴合,关注了太多指标,导致泛化(generalize)性比较差。
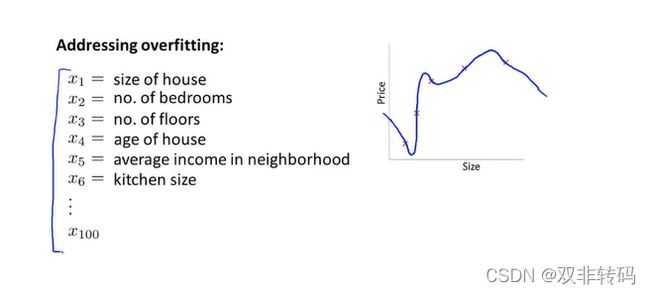
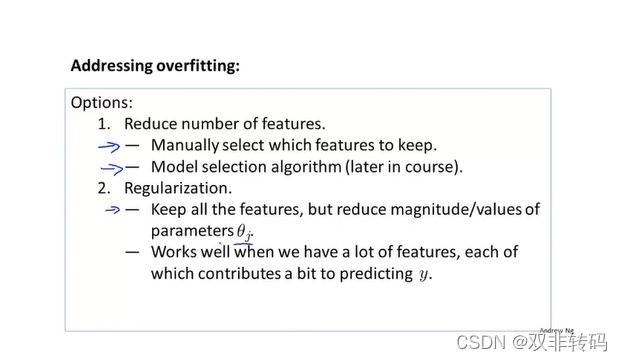
如图22 介绍了应对函数过拟合问题的一些办法。
课程视频P40——代价函数
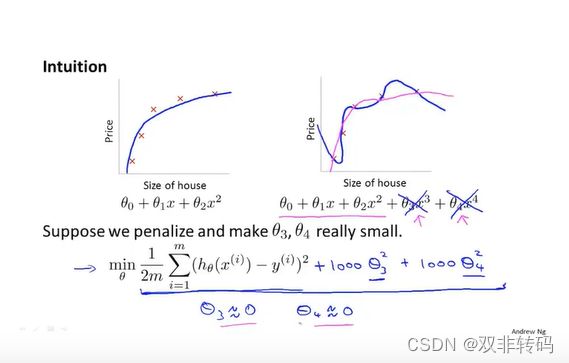
图23 介绍了“罚因子”,对于目标函数最小化问题,当某些指标对代价函数值的影响很小时,如图23 中的 θ 3 , θ 4 \theta_3, \theta_4 θ3,θ4,我们可对其乘以一个很大的数,如此处了1000,作为代价函数的“罚因子”,当 θ 3 , θ 4 \theta_3, \theta_4 θ3,θ4过大时,函数值将很难取得最小值,由此保证了在迭代过程中,保持 θ 3 , θ 4 \theta_3, \theta_4 θ3,θ4的值很小。
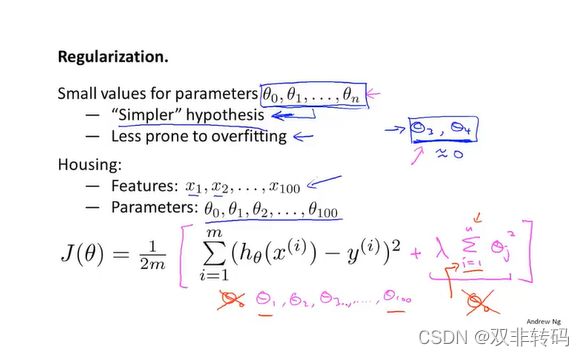
除了“罚因子”之外,用正规化(regularization)求解时也可以对代价函数加上 λ . . . . \lambda.... λ....这一坨。
续接上图
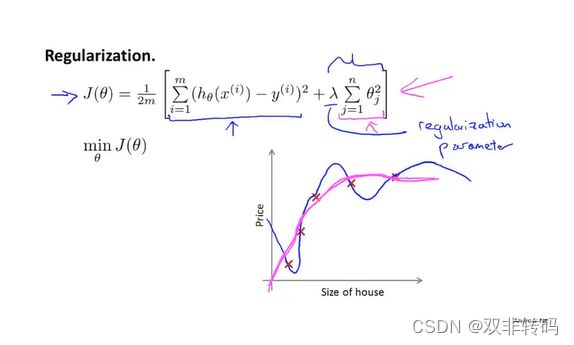
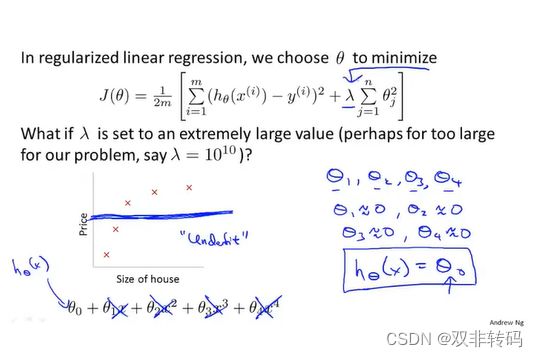
但是 λ . . . . \lambda.... λ....的取值也不是乱取的,若 λ . . . . \lambda.... λ....取得太大了,则相当于与 θ 1 . . . θ n \theta_1...\theta_n θ1...θn全都被干掉了,不起作用了,此时只剩下 θ 1 \theta_1 θ1, 于是 h θ ( x ) = θ 1 , 代 价 函 数 就 变 成 一 条 直 线 了 , 这 样 也 不 行 。 h_{\theta}(x)=\theta_1,代价函数就变成一条直线了,这样也不行。 hθ(x)=θ1,代价函数就变成一条直线了,这样也不行。
课程视频P41——线性回归的正则化
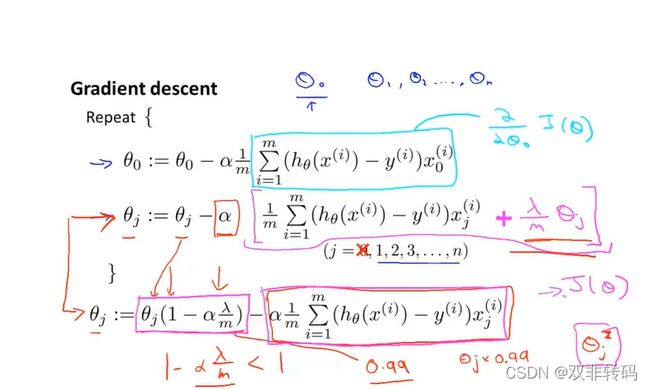
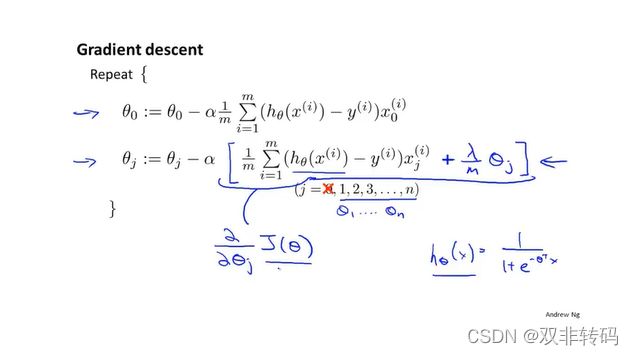
** 如图27表示,在梯度下降中,求偏导那一步最后加上 λ m \frac{\lambda}{m} mλ θ j \theta_j θj, 就相当于在原来的基础上每次开头先将 θ j \theta_j θj减去 α \alpha α θ j \theta_j θj(一个很小的数。**
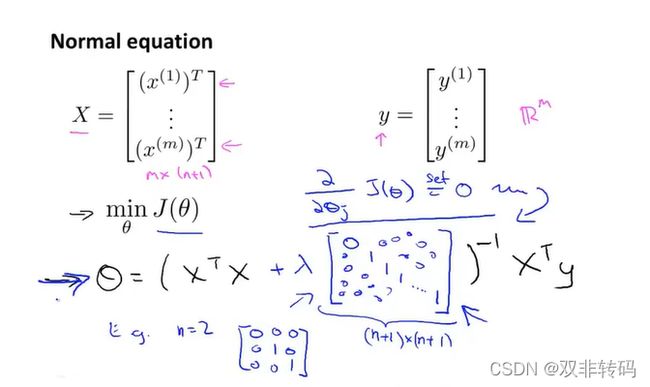
加上 λ m \frac{\lambda}{m} mλ θ j \theta_j θj, 之后,用矩阵形式求解时的求解公式就变成了如图28所示。
课程视频P42——Logistic回归的正则化
与线性回归的正则化类似,只是代价函数变成log函数形式了。
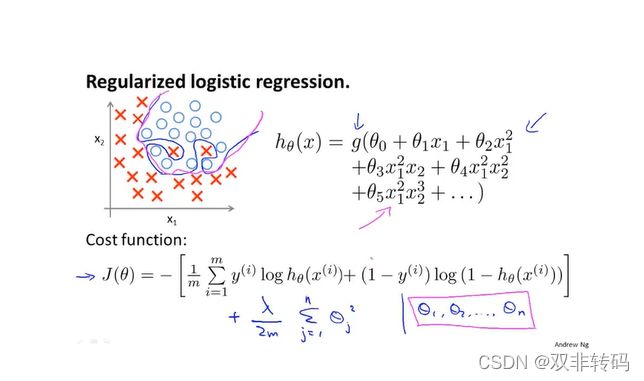
梯度下降法的求解也是与线性回归一样的,只是将 h θ ( x ) h_{\theta}(x) hθ(x)函数换了,如图30 右下角所示。
多元函数的梯度下降法的偏导环节如下所示。
未完待续…