2.2 优化算法(MINI-BATCH、指数加权平均、动量梯度下降、RMSPROP、Adam优化算法、学习率衰减、局部最优)
MINI-BATCH
实际训练中,数据集过于庞大,需要拆分成一个个小的子训练集。
mini-batch梯度下降:选用子训练集进行梯度下降;
- batch梯度下降:选用整个数据集进行梯度下降;mini-batch 的大小为 m(数据集大小);
- 随机梯度下降:选用一个样本当做一个子训练集进行梯度下降;mini-batch 的大小为 1;
术语-epoch:对整个训练集进行了一次梯度下降



两个极端例子,对比MINI-BATCH:
训练神经网络的目的:找到一组参数w、b使成本函数J最小。
若下面这个图是成本函数,它中间的点就是最小值处。
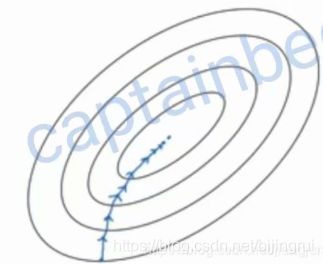
batch 梯度下降法:
- 对所有 m 个训练样本执行一次梯度下降,每一次迭代时间较长,训练过程慢;
- 相对噪声低一些,幅度也大一些;迈的步子大;
- 成本函数总是向减小的方向下降;方向正确;
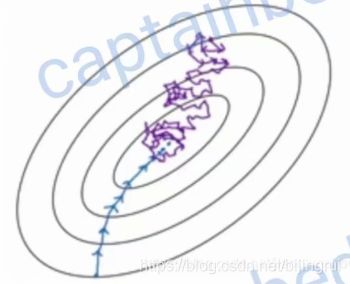
随机梯度下降法:
- 对每一个训练样本执行一次梯度下降,训练速度快,但丢失了向量化带来的计算加速;
- 有很多噪声,减小学习率可以适当;(路途忐忑,步子小,可能还会迷失方向)
- 成本函数总体趋势向全局最小值靠近,但永远不会收敛,而是一直在最小值附近波动。
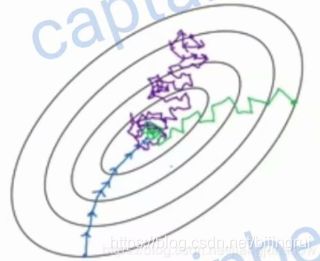
mini-batch梯度下降法:
因此,选择一个
1 < size < m的合适的大小进行 Mini-batch 梯度下降,可以实现方向准确、步子较大,也应用了向量化带来的好处。mini-batch梯度下降时,成本是波荡起伏的
因为某个子集中,可能错误案例比较多,导致了J偏高。但总体趋势还是J走向最低。
mini-batch 的不同大小(size)也是一个超参数
- 如果训练样本的大小比较小,如 m ⩽ 2000 时,选择 batch 梯度下降法;
- 如果训练样本的大小比较大,选择 Mini-Batch 梯度下降法。为了和计算机的信息存储方式相适应,代码在 mini-batch 大小为 2 的幂次时运行要快一些。典型的大小为 2626、2727、...、2929;
- mini-batch 的大小要符合 CPU/GPU 内存。
mini-batch 的大小也是一个重要的超变量,需要根据经验快速尝试,找到能够最有效地减少成本函数的值。


指数加权平均
直观理解:
# β看成K也行
w==温度:w1==第一天的温度,w2==第二天的温度
v==我们最终求的趋势值:v1表示第一天的值,v2表示第二天的值
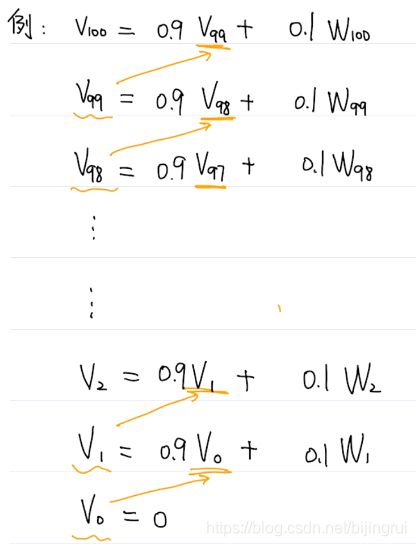
从上面的算法我们可以看出,当天的趋势值 = k * 前一天的趋势值 + (1-k) * 当天的温度。前一天的趋势值 代表 1 / (1-k)天的 近似的趋势值 (不是平均值)
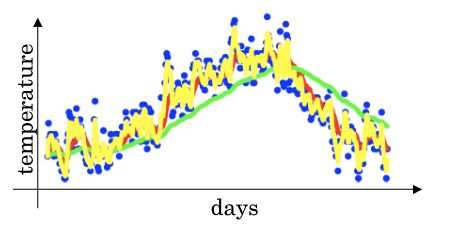
给定一个时间序列,例如伦敦一年每天的气温值,图中蓝色的点代表真实数据。
对于一个即时的气温值,取权重值 k 为 0.9,根据求得的值可以得到图中的红色曲线,(受到最近10天的影响比较大)
当取权重值 k=0.98 时,可以得到图中更为平滑的绿色曲线。(受到最近50天的影响比较大)
而当取权重值 k=0.5 时,得到图中噪点更多的黄色曲线。(受到最近2天的影响)
曲线反映了气温变化的大致趋势。
β 越大相当于求取平均利用的天数越多,曲线自然就会越平滑而且越滞后。
# 类似于K线的MA,但是k线是rolling().mean(),是简单的K线求平均。我们算的是加权MA,离现在近的数值,则权重大。
# MA中,若K线MA的参数60,则如果最近几根K线的暴涨暴跌,那么MA不会太敏感,他会计算最近60根的mean
深入理解:
9^ 1 == 0.9 9^ 2 == 0.81 9^ 3 == 0.7290000000000001 9^ 4 == 0.6561 9^ 5 == 0.5904900000000001 9^ 6 == 0.531441 9^ 7 == 0.4782969000000001 9^ 8 == 0.4304672100000001 9^ 9 == 0.3874204890000001 9^ 10 == 0.3486784401000001 9^ 11 == 0.31381059609000006 9^ 12 == 0.2824295364810001 9^ 13 == 0.2541865828329001 9^ 14 == 0.2287679245496101 9^ 15 == 0.20589113209464907 9^ 16 == 0.18530201888518416 9^ 17 == 0.16677181699666577 9^ 18 == 0.15009463529699918 9^ 19 == 0.13508517176729928 9^ 20 == 0.12157665459056935 9^ 21 == 0.10941898913151242 9^ 22 == 0.09847709021836118 9^ 23 == 0.08862938119652507 9^ 24 == 0.07976644307687256 9^ 25 == 0.0717897987691853 9^ 26 == 0.06461081889226677 9^ 27 == 0.058149737003040096 9^ 28 == 0.05233476330273609 9^ 29 == 0.047101286972462485 9^ 30 == 0.04239115827521624 9^ 31 == 0.038152042447694615 9^ 32 == 0.03433683820292515 9^ 33 == 0.030903154382632636 9^ 34 == 0.027812838944369374 9^ 35 == 0.025031555049932437 9^ 36 == 0.022528399544939195 9^ 37 == 0.020275559590445275 9^ 38 == 0.01824800363140075 9^ 39 == 0.016423203268260675 9^ 40 == 0.014780882941434608 9^ 41 == 0.013302794647291146 9^ 42 == 0.011972515182562033 9^ 43 == 0.01077526366430583 9^ 44 == 0.009697737297875247 9^ 45 == 0.008727963568087723 9^ 46 == 0.00785516721127895 9^ 47 == 0.007069650490151055 9^ 48 == 0.00636268544113595 9^ 49 == 0.005726416897022355 9^ 50 == 0.00515377520732012
代码实现:
# v是一个变量,只是 新的v = k * 旧的v + (1-k)wt
修正:
若w1 == 40度,则算出来 v1 == 0.8度,趋势值v1 v2 以及前面几天 均无法反映 前面一段时间的温度水平。
修正方法:
计算后:
越往后,t的值就越大,即k越来越小,那么公式中的分母
就越来越靠近1,因为后面vt不需要再修正了。
其实在实际开发中,我们都不会使用修正算法。因为只是前面一点点偏离而已,不伤大雅。







动量梯度下降
比"单纯的梯度下降"好;"指数加权平均"是基础;
# 这里的动量 指的是Momentum,是物理上的动量,是用的碗里小球的例子
使用"一般的梯度下降":
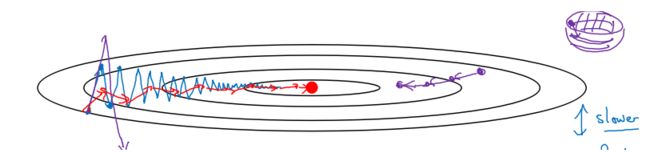
会得到图中的蓝色曲线,它不会径直向着最小值前进(因为他根本不知道最小值在哪里),而且训练集中也可能有些错误的样本,所以方向也不可能百分之百很准,所以梯度下降的图像是曲折的。这种"折叠曲线的前进"比"两点之间直线最短"要效率低。
而且方向不准还导致了我们无法使用大的学习率,想快都快不了。因为如果我们使用大的学习率,那么曲线折叠的幅度会更大。下图中的紫色的线展示了用大的学习率后执行了两步,可以看出跑得更偏了,不仅不能快,反而会使学习效率下降。使用"动量梯度下降":
如何让曲线折叠的幅度更小一些呢?—―使用指数加权平均算法。
首先我们还是像以前一样求出梯度dw和db,然后再使用指数加权算法求出Vdw和Vdb
红线的折叠幅度很小了,幅度小了不仅能更快找到最小值,而且还可以使用大的学习率,使学习速度更快。
指数加权平均中的k变量是一个超参数。在梯度下降中我们一般把它设为0.9。


RMSPROP
原理类似,
RMSProp 有助于减少抵达最小值路径上的摆动,并允许使用一个更大的学习率 α,从而加快算法学习速度。


Adam优化算法
很多优化算法都只能适用于某几类神经网络结构,无法通吃所有情况。
直到后来动量梯度下降的出现,发现它能适用于各种网络结构。
RMSprop又出现了,它也能被广泛应用于各种网络结构中。
后来又出现了Adam优化算法(tensorflow等框架,都内置实现了Adam算法),其实就是将动量梯度下降和RMSprop结合在一起而已。结合之后大家发现它在很多网络结构中都能表现得很出色。
# 偏差修正指的是前面起始的数据 进行修正
超参数的选择
Adam 优化算法有很多的超参数,其中
- 学习率 α:需要尝试一系列的值,来寻找比较合适的;
- β1:常用的缺省值为 0.9;
- β2:Adam 算法的作者建议为 0.999;
- ϵ:不重要,不会影响算法表现,Adam 算法的作者建议为 10^−8;
β1、β2、ϵ 通常不需要调试。


学习率衰减
学习率r之前是固定的。其实让学习率r 随着时间 而慢慢地衰减 是有助于提升学习效率的.
为什么呢?假设我们将mini-batch的值设得很小(64),训练集越小,那么学习的方向就越容易偏离。
学习路线就有可能如下图一样,而且即使到了最小值处,也始终找不到最小值,而在它附近徘徊。
如果让学习率随着学习的次数而慢慢地变小,那么就会出现下图的情况。最开始学习率还是很大,和上图一样。
慢慢地学习率会变小学习步进会变小。从下图可以看出这样一来就可以更加靠近最小值处,找到最小值了。
刚刚开始入门时,门外汉什么都不懂,所以可以大步的粗咯学习。随着学习越来越深入,那么就越需要静下心来慢慢地进行精致的学习。
假设我们将初始的学习率a0设置为0.2,将衰减率decayRate设为1,那么套入上面的公式,
在进行了一个epoch后,a就变成了0.1,在进行了两个epoch后, a变成了0.067,第三个epoch后,a变成了0.05...
随着epoch的次数越多,a越小。




局部最优
在多维图形中,完全没有路径通向全局最优的小坑,称之为“局部最优”
在多维图形中,在小坑处,某个维度虽然如上图所示,但是其他维度,仍然有路径通向全局最优,称之为“鞍点”。
“局部最优”的概率很低,不用担心;可能鞍点很多,也不足为虑。
在“鞍点”或者“局部最优”的附近,比较“平稳”,斜率是0或者很小,要训练很长时间,才能在横向达到最小值,在竖向继续走,找寻全局最优。
- 在训练较大的神经网络、存在大量参数,并且成本函数被定义在较高的维度空间时,困在极差的局部最优中是不大可能的;
- 鞍点附近的平稳段会使得学习非常缓慢,而这也是动量梯度下降法、RMSProp 以及 Adam 优化算法能够加速学习的原因,它们能帮助尽早走出平稳段。


代码
https://gitee.com/bijingrui1997/deep_learning_notes/tree/master/2.2%20%E4%BC%98%E5%8C%96%E7%AE%97%E6%B3%95