【论文学习】UPHDR-GAN: Generative Adversarial Network forHigh Dynamic Range Imaging with Unpaired Data
UPHDR-GAN:基于非配对数据的高动态范围成像生成对抗网络
- 摘要
- introduction
-
- 主要贡献
- proposed method
-
- 网络框图
- 网络详介
-
- 1、输入
- 2、生成器输出
- 3、生成器
- 4、鉴别器
- 5、Min-patch Module
- 损失函数
-
- 优化方程
- 目标函数
-
- GAN Loss:
摘要
本文提出了一种有效融合多曝光输入的方法,利用未配对数据集生成高质量的高动态范围(HDR)图像。基于深度学习的HDR图像生成方法严重依赖成对数据集,地面真实图像在生成合理的HDR图像中起着主导作用,没有地面真实值的数据集很难用于训练深度神经网络。最近,生成对抗网络(GAN)已经展示了在没有配对实例的情况下将图像从源域X转换到目标域Y的潜力。本文,提出了一个基于gan的网络来解决这些问题,同时生成令人愉快的HDR结果,命名为UPHDR-GAN。该方法放松了成对数据集的约束,学习了从LDR域到HDR域的映射关系。虽然配对数据丢失,但通过改进的GAN丢失、改进的鉴别器网络和有用的初始化阶段,UPHDR-GAN可以正确处理由移动物体或不对准引起的重影伪影。该方法保留了重要区域的细节,提高了图像的整体感知质量。与代表性方法的定性和定量比较表明了所提出的UPHDR-GAN的优越性。
introduction
为了提高融合性能,对输入图像对齐(秩最小化检测hdr生成异常点;Sampson距离估计单应矩阵对输入图像对齐)。当图像未完全正确对齐可能造成鬼影模糊。提出基于patch生成完全注册(registered)的图像堆栈,处理饱和区域并避免伪影。基于patch的方法缺乏鲁棒性,对于复杂的场景不能产生满意的结果。引入基于学习的方法来模拟融合过程(基于流的预处理来对齐输入;将对齐过程嵌入到网络中;提出注意引导网络处理未对准和饱和;基于gan的方法引入对抗损失,创建真实的信息来改善不满意的区域)。基于深度学习的融合方法严重依赖成对输入和地面真实图像。
为了放松数据集的约束,本文提出一种基于gan的融合方法,使用非配对数据集优化网络,命名为UPHDR-GAN。首先,引入初始化阶段来维护参考图像和输出之间的内容信息。初始化阶段完全避免了重影,因为它只是将参考图像转移到HDR域。其次,改进了常见的对抗损失,生成具有尖锐边缘的图像。第三,在融合曝光不足和过曝图像的信息时,采用min-patch训练模块对重影伪影进行检测和处理。UPHDR-GAN通过平衡HDR转换和内容保存来正确处理动态对象。
主要贡献
提出了一种基于gan的多曝光HDR融合网络,该网络放松了成对训练数据的约束,学习了输入域和目标域之间的映射关系。据我们所知,这项工作是第一个基于gan的非配对HDR重建方法。
•提出的方法不仅可以在不配对的数据集上训练,而且可以生成具有更少鬼影伪影的HDR结果。我们利用改进的GAN损耗、初始化阶段和最小补丁训练模块来避免重影,提高图像质量。
proposed method
网络框图
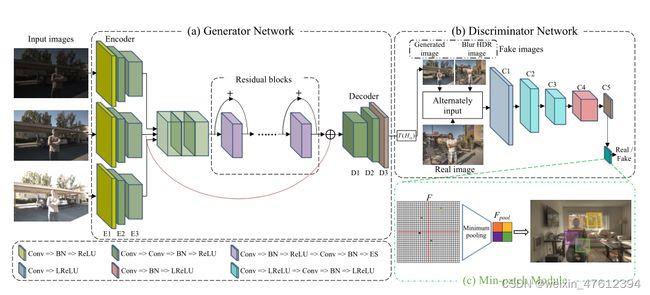
UPHDR-GAN是一个图像到图像的任务,有三个输入和一个输出,结构如图2:
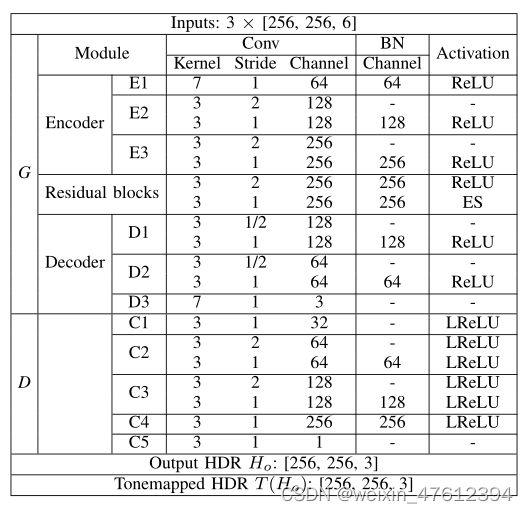
网络架构的详细层结构如表所示
网络详介
1、输入
为了提高效率,我们没有使用全尺寸的图像对模型进行优化,而是从训练图像中以64步的步幅裁剪256 × 256个重叠的patch。编码器包含三个分支,每个分支的输入大小为256×256 × 6,即输入x = {x1, x2, x3}及其映射的HDR图像Hm = {H1, H2, H3}的拼接。Hm通过简单的gamma编码得到:
H i = x i γ t i γ > 1 H_i=\frac{x_i^\gamma}{t_i}~ ~~~~~~~~~~~~~ \gamma>1 Hi=tixiγ γ>1
式中xi为输入图像,ti为对应的曝光时间。LDR图像和映射的HDR图像是互补的,前者检测饱和度和未对准,后者促进LDR图像之间的网络收敛。
2、生成器输出
在得到HDR输出Ho后,我们添加一个µ-law[5]后处理来细化生成的HDR图像的范围,因为在色调映射的HDR图像上计算损失函数更有效:
T ( H o ) = log ( 1 + μ H o ) log ( 1 + μ ) T(H_o)=\frac{\log(1+\mu H_o)}{\log(1+\mu) } T(Ho)=log(1+μ)log(1+μHo)
3、生成器
生成器网络由编码器、剩余块和解码器组成。编码器由三个卷积块E1、E2和E3组成。编码器过程中提取有用的信号,用于后续的残差块,探索高阶特征。两个转置后的卷积块(D1和D2)和卷积层(D3)组成解码器,将特征恢复到输出图像。
4、鉴别器
鉴别器与生成器互补。PatchGAN用于对image patch进行分类,而不是对完整的图像i分类。从生成的HDR图像和真实的HDR图像中裁剪70 × 70个重叠的patch来训练基于patch的鉴别器。然而,在训练过程中,并不是patch中的所有区域都有助于判别器的优化。如果生成器产生的图像具有奇怪的区域和不同于真实图像的区域,特殊的区域可以被认为是不受欢迎的鬼影伪影。多注意最奇怪的部分是必要的。
5、Min-patch Module
在PatchGAN的末尾引入Min-patch训练模块。min-patch训练的实现是在判别器的最终输出中增加一个可选的最小池化层。F表示鉴别器中C5卷积层之后的特征。在训练鉴别器时,使用常规的PatchGAN,用F对网络进行优化。在训练生成器时,在 C5 卷积层之后添加最小池化层。使用最小池化层(Fpool)之后的特性来计算损失。该生成器使用Fpool进行优化。该鉴别器利用普通的PatchGAN进行真伪鉴别,并使用F进行训练。经过 C5 卷积层的特征F的大小是64 × 64。min-patch训练模块采用16 × 16最小pooling,输出大小为4 × 4的特征Fpool来优化生成器。
损失函数
优化方程
由于GAN是一个最小-最大优化系统(最小化G,最大化D),本文提出的UPHDR-GAN优化如下方程,以达到发生器和鉴别器之间的平衡:
G ∗ , D ∗ = a r g m i n m a x L ( G , D ) G^*,D^* =arg~ min~max~L(G,D) G∗,D∗=arg min max L(G,D)
目标函数
基于HDR成像特性,目标函数设计为以下两项:
(1)GAN损耗 L G A N ( G , D ) L_{GAN}(G,D) LGAN(G,D)实现所需转换,将多曝光输入转换为HDR输出;
(2) HDR转换过程中保留图像语义信息的内容损失 L C O N ( G ) L_{CON}(G) LCON(G)。
全损失函数为:
L ( G , D ) = L G A N ( G , D ) + ω C O N L C O N ( G ) L(G,D)=L_{GAN}(G,D)+\omega_{CON} L_{CON}(G) L(G,D)=LGAN(G,D)+ωCONLCON(G) 其中 ω C O N \omega_{CON} ωCON为超参数,控制内容丢失的相对重要性,平衡转换效果和内容保存效果。
GAN Loss:
GAN Loss有助于G在没有ground truth的情况下生成与目标域图像相似的结果,并且使用生成的HDR图像和真实的HDR图像混淆D。然而,vanilla GAN损失不能保留边缘和边界信息。因此,Chen等人提出将D与模糊数据集混淆,将模糊数据集视为伪图像,驱动生成器生成边缘清晰的图像。类似地,我们还添加了一个模糊的HDR数据集,以帮助G生成高质量的输出。
具体来说,对于目标图像{yj}j=1,…,M∈Y,我们利用核大小为5 × 5的高斯滤波器去除它们清晰的边缘,生成模糊数据集{bj}j=1,…,M∈b。我们在图3中展示了模糊数据集的两个例子。生成的图像应避免边缘模糊的特点。选择模糊数据集作为伪图像可以帮助网络产生没有模糊边缘的图像。也就是说,鉴别器需要对G(x)、b和y三类图像进行分类,其中生成的图像G(x)和模糊的HDR图像b是虚假输入,真实的HDR图像y是真实输入。修改后的对抗性损失设计为: