OpenCV-初探
OpenCV初探
文章目录
- OpenCV初探
-
- 配置环境
- pyhton简单操作
-
-
- 利用PIL库实现一些图像处理
-
- C++简单操作
-
- 读取滑动条时老是抛出异常&解决
- 一些变换
-
- 高斯平滑(模糊)
- 使用高斯模糊对图像实现基2的降采样
- Canny边缘检测器
- 结合图像金字塔&Canny边缘检测器
- 从摄像头中读取
- 写入AVL文件
配置环境
pycharm配置非常简单,就在此略过了。
主要是c++的找了好久的方法。
我配置的是VS2017+OpenCV,然后推荐大家看这个,我是通过这篇博客解决了配置的问题。
当时更改了库目录以及包目录和环境变量以及依赖项所有能更改的。但是还是提醒找不到#include这个文件。
后来看了博客推测问题可能出在:VS2017应该设置的环境变量是vc15下的,但是当时看其他博客配置的是vc14的。
但是这个配置完了记得改debug X86为X64。
over!
pyhton简单操作
import cv2 as cv
img = cv.imread('一张图片的绝对路径')
cv.namedWindow("Image")
cv.imshow("Image",img)# 在界面显示
cv.waitKey(0)# 等待时间,ms级,0表示按任意键终止
cv.destroyWindow("Image")# 可以有参数也可以没有
print(img)
print(img.shape)# (x,x,3)表示是RGB通道,但是在cv里面是BGR类型
# 所以一般实现的时候别用plot库,这个是RGB类型,二者切换会出现事故

img = cv.imread('xxx.jpg',cv.IMREAD_COLOR)# 显示的是彩色图像
img = cv.imread('xxx.jpg',cv.IMREAD_GRAYSCALE)# 显示的是灰度图像
# 其他的一些函数
# 保存
cv2.imwrite("图片保存的名字",img)
# 打印类型
type(img)# 这个是将视频转换为灰度的视频。
但是总感觉转换.mp4文件为灰度播放,失败了。
然后是貌似只把人像变成了蓝色,好怪喔)
vcvc = cv2.VideoCapture(r"C:\Users\林颐\PycharmProjects\pythonProject\练习3\test01.MP4")
if vcvc.isOpened():
oepn, frame = vcvc.read()
else:
open = False
while open:
ret, frame = vcvc.read()
if frame is None:
break
if ret == True:
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
cv2.imshow('result', gray)
if cv2.waitKey(100) & 0xFF == 27:
break
vcvc.release()
cv2.destroyAllWindows()
利用PIL库实现一些图像处理
pil_im=Image.open(r'D:\cmttmmderijisc\2020-08-14 191734.jpg')
print(pil_im)
# 将图片转换为灰度图片并显示
pil_im=Image.open(r'D:\cmttmmderijisc\2020-08-14 191734.jpg').convert('L')
pil_im.show()# 删除需要自己手动按叉叉
# 创建缩略图
pil_im.thumbnail((128,128))
pil_im.show()

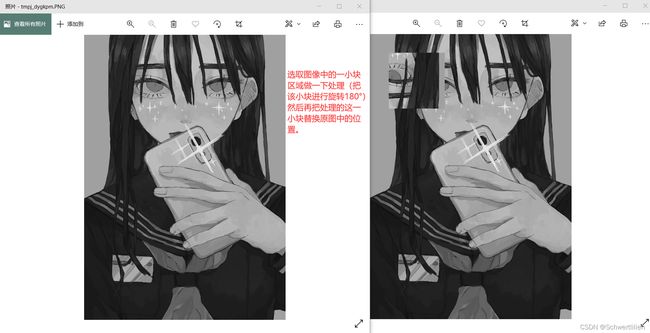
# 复制粘贴图像区域
box=(100,100,400,400)
region=pil_im.crop(box)# crop从一副图像中剪裁指定区域
region=region.transpose(Image.ROTATE_180)
pil_im.paste(region,box)
pil_im.show()
region.show()

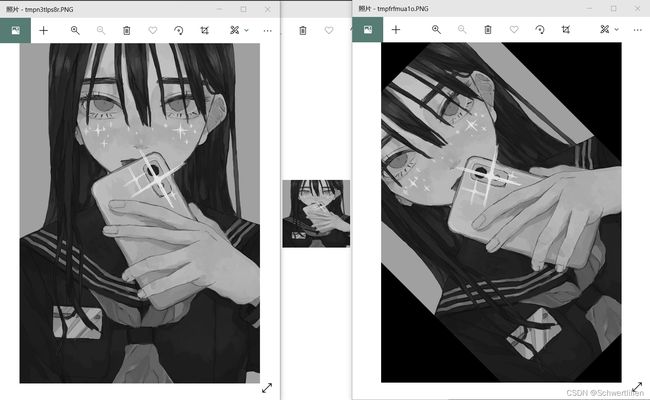
# 调整尺寸和旋转
out=pil_im.resize((128,128))# 使用resize调整尺寸
out.show()
out=pil_im.rotate(45)# rotate逆时针旋转45°
out.show()
# 画图
from pylab import *
from PIL import Image
im = array(Image.open(r'D:\cmttmmderijisc\2020-08-14 191734.jpg'))
imshow(im)
x=[100,100,400,400]
y=[200,500,200,500]
plot(x,y,'r*')
plot(x[:2],y[:2])
axis('off')# 移除坐标轴
title("ploting")# 为显示的图像命名
show()

但是我设置好了vs+opencv,就不想写python了)。
C++简单操作
果然、虽然它麻烦,可我还是更愿意写这个。
以下是简单的打开图片以及视频。
# include以上打开视频,在显示视频的时候不可以快速跳转。于是:
- 加一个滑动条,使得用户可以进行视频跳转。
- 允许用户按下S键-暂停(单步),R键-恢复。
- 无论何时用户滑动条跳转到视频的一个新的时间点,都使用但不模式在该点播放。
读取滑动条时老是抛出异常&解决
先放一下代码,就是照书写的。
#include然后找到是因为g_run的那一条语句写错,导致不能使用 s & r 来暂停以及恢复。
如果是非正常退出,比如点了叉叉退出,就会抛出异常,比如这样。

但是如果是正常的滑动条读完或者按Esc键退出是不会出现的)
一些变换
高斯平滑(模糊)
高斯模糊是?关于高斯模糊的详细解释
高斯模糊,也叫高斯平滑,英文为:Gaussian Blur,是图像处理中常用的一种技术,主要用来降低图像的噪声和减少图像的细节。高斯模糊在许多图像处理软件中也得到了广泛的应用。
话说在画画中我会经常用到呢)
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "iostream"
#include "fstream"
using namespace std;
using namespace cv;
//加载图像并显示之前平滑处理的图像
void smooth(const Mat &image) {
namedWindow("in", WINDOW_AUTOSIZE);
namedWindow("out", WINDOW_AUTOSIZE);
imshow("in", image);
Mat Out;
GaussianBlur(image, Out, Size(5, 5), 3, 3);
GaussianBlur(Out, Out, Size(5, 5), 3, 3);
imshow("out", Out);
waitKey(0);
destroyAllWindows();
}
int main(){
Mat img = imread("E:\\CV\\pict_lib\\1.jpg");
smooth(img);
}
高斯平滑只适合特定的照片,有时会破坏一些图片的特性。

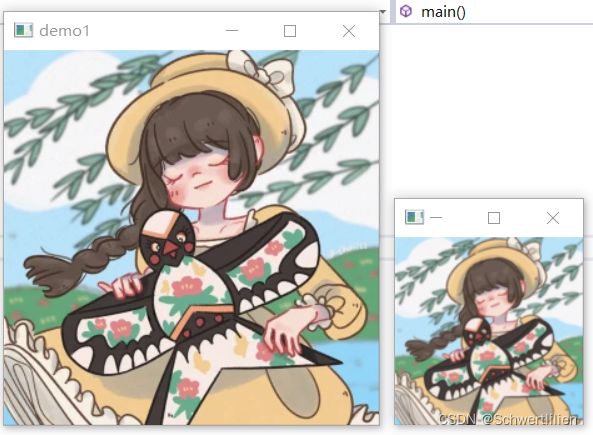
使用高斯模糊对图像实现基2的降采样
降采样?对上采样、降采样、图像金字塔的解释
(个人理解一下这句话,就是模糊+缩小)
在OpenCV中高斯模糊+降采样通过cv::pyrDown()函数实现。
cv::pyrDown():创建一个新的图像,其宽高均为原始图像的一半。
int main() {
Mat img1, img2;
namedWindow("demo1", WINDOW_AUTOSIZE);
namedWindow("demo2", WINDOW_AUTOSIZE);
img1 = imread("E:\\CV\\pict_lib\\1.jpg");
imshow("demo1", img1);
pyrDown(img1, img2);
imshow("demo2", img2);
waitKey(0);
destroyAllWindows();
return 0;
}
(或许你不太能看出来有高斯模糊,但是我个人是感觉这项图片变小,但是是好的方面变小)
于是我又放了张图,这个就比较明显,确实是高斯模糊+降采样了。
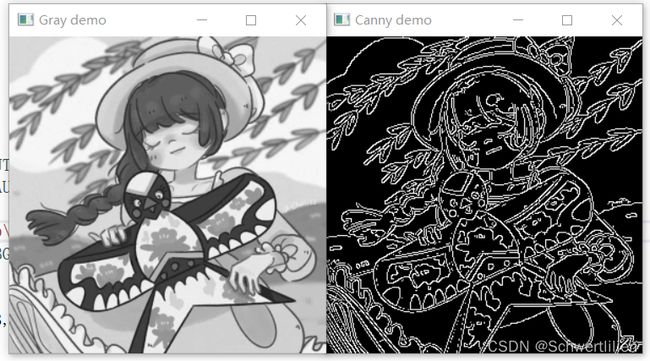
Canny边缘检测器
边缘检测?有关于边缘检测的详细解释
Canny边缘检测器:cv:Canny()
cv::cvtColor():边缘检测器通过该函数生成一个和原图一样大小,但是只有一个通道的图像。从而将RGB图像转换为灰度图。
或者是在imread的时候输入IMREAD_GRAYSCALE,直接读取灰度图。
这个操作在OpenCV中被定义为宏:cv:COLOR2GRAY。(在python中使用过,但是貌似感觉失败了)
int main() {
Mat img_rgb, img_gry, img_cny;
namedWindow("Gray demo", WINDOW_AUTOSIZE);
namedWindow("Canny demo", WINDOW_AUTOSIZE);
img_rgb = imread("E:\\CV\\pict_lib\\2.jpg");
cvtColor(img_rgb, img_gry, COLOR_BGR2GRAY);
imshow("Gray demo", img_gry);
Canny(img_gry, img_cny, 10, 100, 3, true);
imshow("Canny demo", img_cny);
waitKey(0);
destroyAllWindows();
return 0;
}
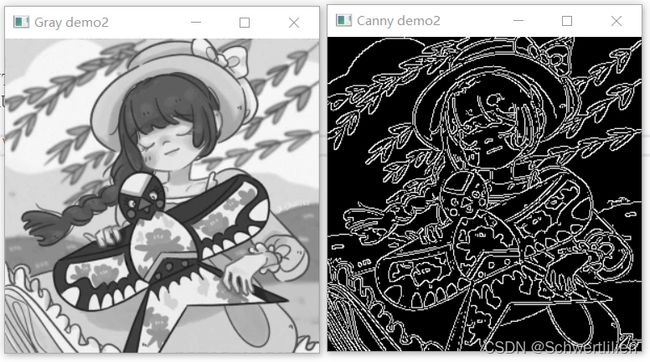
Mat img_gry;
namedWindow("Gray demo2", WINDOW_AUTOSIZE);
img_gry = imread("E:\\CV\\pict_lib\\2.jpg",IMREAD_GRAYSCALE);
也可以直接这样得到灰度图,然后再进行边缘检测。
可以看到结果基本上是一样的。
虽然目前Canny算子是理论上最完善的,但是我们也可以看见该图上丢失了一些细节。
结合图像金字塔&Canny边缘检测器
简单应用:收缩两次图像,然后寻找两次收缩过程中的图像的边缘。
int main() {
Mat img_gry, img_cny,img_pyr,img_pyr2;
namedWindow("Gray demo3", WINDOW_AUTOSIZE);
namedWindow("Canny demo3", WINDOW_AUTOSIZE);
img_gry = imread("E:\\CV\\pict_lib\\2.jpg",IMREAD_GRAYSCALE);
imshow("Gray demo3", img_gry);
pyrDown(img_gry, img_pyr);
pyrDown(img_pyr, img_pyr2);
Canny(img_pyr2, img_cny, 10, 100, 3, true);
imshow("Canny demo3", img_cny);
waitKey(0);
destroyAllWindows();
return 0;
}

读写其像素值
int main() {
Mat img_rgb,img_gry, img_cny,img_pyr,img_pyr2;
img_rgb = imread("E:\\CV\\pict_lib\\2.jpg");
cvtColor(img_rgb, img_gry, COLOR_BGR2GRAY);
pyrDown(img_gry, img_pyr);
pyrDown(img_pyr, img_pyr2);
Canny(img_pyr2, img_cny, 10, 100, 3, true);
int x = 16, y = 32;
Vec3b intensity = img_rgb.at<Vec3b>(y, x);//或者是(x,y)[0]
uchar blue = intensity[0];
uchar green = intensity[1];
uchar red = intensity[2];
std::cout << "At(x,y) = (" << x << "," << y << ") : (blue,green,red) = (" << (unsigned int)blue << "," << (unsigned int)green << "," << (unsigned int)red << ")" << std::endl;
std::cout << "Gray pixel there is:" << (unsigned int)img_gry.at<uchar>(y, x) << std::endl;//读取(32,16)处的像素值
x /= 4;
y /= 4;
std::cout << "Pyramid2 pixel there is:" << (unsigned int)img_pyr2.at<uchar>(y, x) << std::endl;
img_cny.at<uchar>(x, y) = 128;//为什么要把这里的像素值设置为128?我不李姐
return 0;
}

从摄像头中读取
为实现和某种摄像头中读取的实时数据流进行交互,OpenCV中的HighGUI模块提供了一个简单的方法。
对于cv::VideoCapture:
从硬盘读取文件:需要指示读取文件名的路径
从摄像头读取视频:需要有一个相机的ID(一般PC只有一个摄像头连接,这个ID通常=0)
若ID=-1,此时表示:任意选择一个。
int main() {
namedWindow("demo", WINDOW_AUTOSIZE);
VideoCapture cap;
Mat frame;
cap.open(0);
if (!cap.isOpened()) {
std::cerr << "Couldn't open capture." << endl;
return -1;
}
while (true){
cap >> frame; //捕获图像
if (frame.empty())return 0;
imshow("demo", frame); //显示图像
if (waitKey(30)>=0) break;//按下任意键退出
}
cap.release(); //释放相机捕获对象
destroyAllWindows(); //关闭所有窗口
return 0;
}

(我敲,写错字了,请忽略)
写入AVL文件
cv::VideoWriter我们可以创建一个写入对象以便将帧依次输入到一个视频文件中。
cv::VideoWriter.release():在将每一帧图像输入到cv::VideoWriter对象中后调用。
int main(){
namedWindow("demo", WINDOW_AUTOSIZE);
namedWindow("Log_Polar", WINDOW_AUTOSIZE);
//获取视频
VideoCapture cap("C:\\Users\\林颐\\Desktop\\shuttle.avi");
//获取帧率
double fps = cap.get(CAP_PROP_FPS);
//获取宽高
Size size(
(int)cap.get(CAP_PROP_FRAME_WIDTH),
(int)cap.get(CAP_PROP_FRAME_HEIGHT)
);
VideoWriter writer;
//参数一:输出文件名;参数二:编码方式;参数三:帧率;参数四:单帧图像分辨率
writer.open("C:\\Users\\林颐\\Desktop\\out.avi", VideoWriter::fourcc('M', 'J', 'P', 'G'), fps, size);
//用于运动的jpeg图像编码的字符为MJPG,所以指定VideoWriter::fourcc('M', 'J', 'P', 'G')
Mat logpolar_frame, bgr_frame;
while(true){
cap >> bgr_frame;
if (bgr_frame.empty())break;
imshow("demo", bgr_frame);
//将视频转化为对极数视频
logPolar(
bgr_frame,
logpolar_frame,
Point2f(bgr_frame.cols / 2,bgr_frame.rows / 2),
40,
WARP_FILL_OUTLIERS
);
imshow("Log_Polar", logpolar_frame);
writer << logpolar_frame;//写入新的视频文件
if (waitKey(10) == 27)break;
}
cap.release();
return 0;
}
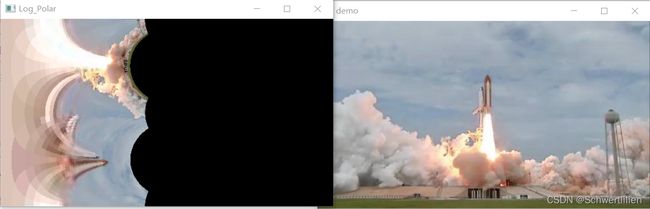
注意:输入输出必须是.avi 格式文件
不然就会xiu的一下出现屏幕,然后又xiu的一下不见,还不会报错orz。