第四讲 【cartographer】纯定位 纯本地化 pure_localization
系列文章目录
第一讲【ROS-SLAM】2D激光雷达 cartographer构建地图
第二讲 【cartographer】Ubuntu16.04 kinetic 最新版cartographer安装(2020/11/4更新)
第三讲 【cartographer】 添加功能以从RVIZ为纯本地化模式设置初始姿势
第四讲 【cartographer】纯定位 纯本地化 pure_localization
第五讲【cartographer】在仿真环境中 建图 纯定位
第六讲【cartographer】纯定位参数优化(初级篇)
文章目录
- 系列文章目录
- 前言
- 一、cartographer是什么?
- 二、cartographer纯定位步骤
-
- 1.引入launch启动文件
- 2.lua参数文件
- 总结
前言
随着5G的不断发展,无人驾驶也越来越重要,很多人都开启了学习SLAM中的cartographer,本文就介绍了cartographer纯定位模式,也就是纯本地化,也叫pure_localization。一、cartographer是什么?
cartographer算法的翻译叫做制图师,实际的作用就是SLAM。SLAM (simultaneous localization and mapping),也称为CML (Concurrent Mapping and Localization), 即时定位与地图构建,或并发建图与定位。
也就是说cartographer有建图与定位的功能。下面就是介绍cartographer定位模式。
二、cartographer纯定位步骤
1.引入launch启动文件
demo_backpack_2d_localization.launch
<launch>
<!-- <param name="/use_sim_time" value="true" /> -->
<param name="/use_sim_time" value="false" />
<!-- <param name="robot_description"
textfile="$(find cartographer_ros)/urdf/backpack_2d.urdf" /> -->
<!-- <node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" /> -->
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename backpack_2d_localization.lua
-start_trajectory_with_default_topics = false
-load_state_filename $(find lyric_maps_manager)/scripts/map/mymap.pbstream"
output="screen">
<remap from="echoes" to="scan" />
<remap from="imu" to="imu_data" />
<remap from="odom" to="odom_tf" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<!--
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
<node name="playbag" pkg="rosbag" type="play"
args="clock $(arg bag_filename)" /> -->
</launch>
backpack_2d_localization.lua
include "revo_lds_2d_localization.lua"
TRAJECTORY_BUILDER.pure_localization_trimmer = {
max_submaps_to_keep = 5,
}
POSE_GRAPH.optimize_every_n_nodes = 20
return options
2.lua参数文件
backpack_2d_localization.lua
include "revo_lds_2d_localization.lua"
TRAJECTORY_BUILDER.pure_localization_trimmer = {
max_submaps_to_keep = 5,
}
POSE_GRAPH.optimize_every_n_nodes = 20
return options
revo_lds_2d_localization.lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "imu_link",
published_frame = "odom_combined",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = false,
use_odometry = true,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.5,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 2e-2,
--启用将跟踪的姿势发布为geometry_msgs / PoseStamped到主题“ tracked_pose”。
--publish_tracked_pose_msg = true,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
--pure_localization
POSE_GRAPH.optimize_every_n_nodes = 0
MAP_BUILDER.num_background_threads = 4
POSE_GRAPH.global_sampling_ratio = 0.003
POSE_GRAPH.constraint_builder.sampling_ratio = 0.3
POSE_GRAPH.constraint_builder.min_score = 0.85
POSE_GRAPH.global_constraint_search_after_n_seconds = 30
--pure_localization end
-- POSE_GRAPH.optimization_problem.log_solver_summary = true
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.submaps.num_range_data = 45
TRAJECTORY_BUILDER_2D.min_range = 0.05
TRAJECTORY_BUILDER_2D.max_range = 15.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = true
--重力常数
TRAJECTORY_BUILDER_2D.imu_gravity_time_constant = 9.7883
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
--TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.angular_search_window = math.rad(45.)
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1
--扫描匹配器可以在不影响分数的情况下自由地前后移动匹配项。我们希望通过使扫描匹配器支付更多费用来偏离这种情况,
--从而对这种情况进行惩罚。控制它的两个参数是TRAJECTORY_BUILDER_2D.ceres_scan_matcher.translation_weight和
--rotation_weight。越高,将结果从先前移开,换句话说,就越昂贵:扫描匹配必须在要接受的另一个位置产生更高的分数。
--TRAJECTORY_BUILDER_2D.ceres_scan_matcher.translation_weight = 2e2
--TRAJECTORY_BUILDER_2D.ceres_scan_matcher.rotation_weight = 4e2
POSE_GRAPH.optimization_problem.huber_scale = 1e2
--odom
--POSE_GRAPH.optimization_problem.initial_pose_translation_weight = 1e5
--POSE_GRAPH.optimization_problem.initial_pose_rotation_weight = 1e5
--POSE_GRAPH.optimization_problem.odometry_translation_weight = 1e5
--POSE_GRAPH.optimization_problem.odometry_rotation_weight = 1e1
return options
总结
不想长篇大论,干脆直接给出参数启动文件,正常情况下,安装正确的cartographer之后,只需要将imu,odom的话题remap到正确的话题,使用上面的参数启动文件,是可以实现定位的。
tips:
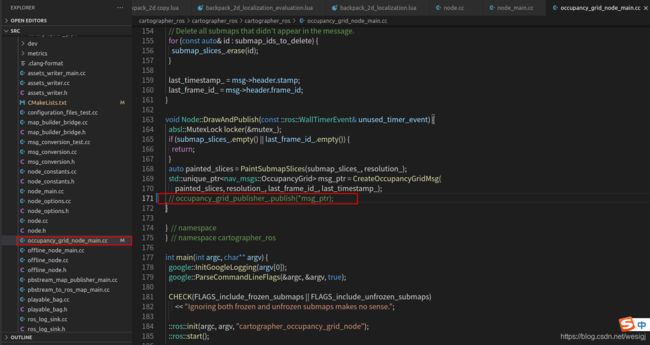
如果不想一边定位,地图一边变化,需要注释掉下面这行代码。
本博主在仿真环境中使用最新版本的cartographer_ros的时候,注释以下代码,也不能实现地图不更新。
可能原因:
1、最新版本不可以通过该操作实现地图不更新。(已排除该原因)
2、第一次能够实现是因为进行了其他的代码修改操作。(已排除该原因)
// occupancy_grid_publisher_.publish(*msg_ptr);