SRCNN超分辨率Pytorch实现,代码逐行讲解,附源码
目录
1.SRCNN介绍
训练过程
损失函数
2.实验常见问题和部分解读
1. torch.utils.data.dataloader中DataLoader函数的用法
2.SRCNN图像颜色空间转换原因以及方法?
3. model.parameters()与model.state_dict()的区别
4. .item()函数的用法?
5.最后的测试过程步骤?
6.argparse的使用以及定义
7.unsqueeze与squeeze的使用
1.unsqueeze用法:在数组原来维度索引i之间增加一个维度
2.Squeeze用法:挤压掉tensor数据中维度特征数为1的维度
8.对Python之if __name__ == ‘__main__‘的理解。
3.Code部分解读
model.py
dataset.py
prepare.py(制作自定义的训练和验证的h5格式的数据集)
train.py(训练SRCNN模型,得到最优参数)
utils.py(工具包)
test.py
4.实验结果展示
1.SRCNN介绍
超分辨率,就是把低分辨率(LR, Low Resolution)图片放大为高分辨率(HR, High Resolution)的过程。

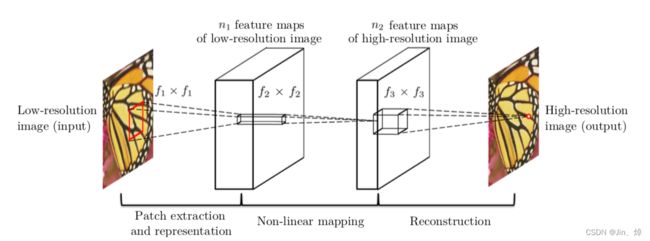
图像特征提取层:通过CNN将图像Y 的特征提取出来存到向量中。用一层的CNN以及ReLU去将图像Y 变成一堆堆向量,即feature map。
![]()
非线性映射层:把提取到的特征进一步做非线性映射,加大网络深度,提高网络复杂性。

重建层:结合了前面得到的补丁来产生最终的高分辨率图像。
![]()
实验步骤
- 输入LR图像X,经双三次(bicubic)插值,被放大成目标尺寸(如放大至2倍、3倍、4倍),得到Y ,即低分辨率图像(Low-resolution image)
- 通过三层卷积网络拟合非线性映射
- 输出HR图像结果F ( Y )
注解:
- Y:输入图像经过预处理(双三次插值)得到的图像,我们仍将Y 当作是低分辨率图像,但它的size要比输入图像要大。
- F ( Y ) :网络最后输出的图像,我们的目标就是通过优化F(Y)和Ground-Truth之间的loss来学会这个函数F (⋅) 。
- X:高分辨率图像,即Ground-Truth,它和Y的size是相同的。
- 图像被转化为 YCbCr 色彩空间,尽管该网络只使用亮度通道(Y)。然后,网络的输出合并已插值的 CbCr 通道,输出最终彩色图像。我们选择这一步骤是因为我们感兴趣的不是颜色变化(存储在 CbCr 通道中的信息)而只是其亮度(Y 通道);根本原因在于相较于色差,人类视觉对亮度变化更为敏感。
训练过程
图片引用:超分辨 :SRCNN_超分辨 srcnn_今晚打佬虎的博客-CSDN博客
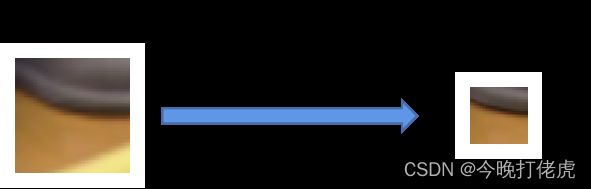
1.降低分辨率:

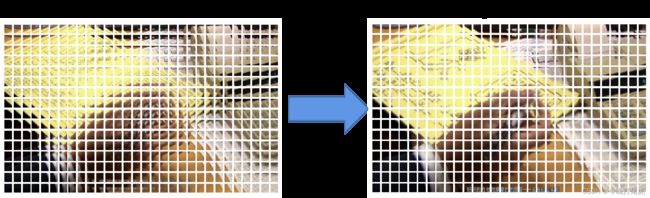
2.切割图片,补丁之间有重复
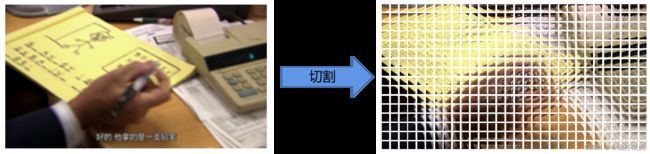
3.训练模型,学习低分辨率 → to→ 高分辨率的映射关系
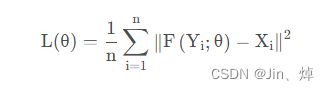
损失函数
损失哈数:MES(均方误差),选择MSE作为损失函数的一个重要原因是MSE的格式和我们图像失真评价指标PSNR很像
F(Y;θ):得到的超分辨率图像 X:原高分辨率图像
激活函数:Relu
PSRN:峰值信噪比,是一种评价图像的客观标准,它具有局限性,一般是用于最大值信号和背景噪音之间的一个工程项目。
MSE与PSNR公式对比:
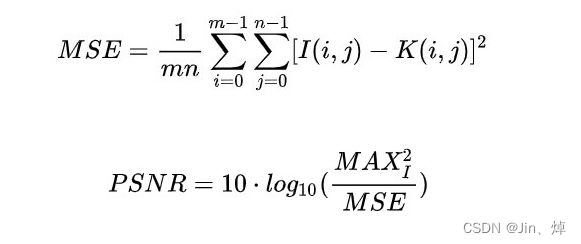
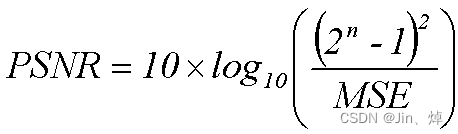
这里的MSE是原图像(语音)与处理图像(语音)之间均方误差。
SSIM(另外一种衡量结果的参数)

2.实验常见问题和部分解读
1. torch.utils.data.dataloader中DataLoader函数的用法
通过查阅资料,翻阅代码实例得到DataLoader()函数参数意义如下:
1.dataset (Dataset) :决定数据从哪读取或者从何读取;
2. batch_size (python:int, optional) : 每次处理的数据集大小(默认为1)
3. shuffle (bool, optional) :每一个 epoch是否为乱序 (default: False);
4. num_workers (python:int, optional) : 多少个进程读取数据(默认为0);
5. pin_memory(bool, optional) : 如果为True会将数据放置到GPU上去(默认为false)
6. drop_last (bool, optional) :当样本数不能被batchsize整除时,最后一批数据是否舍弃(default: False)
Eg:shuffle(bool,optional)表示传入的参数类型为bool类型,并且该参数shuffle是可选参数。
2.SRCNN图像颜色空间转换原因以及方法?
选择YCbCr的原因:因为我们感兴趣的不是颜色变化(存储在 CbCr 通道中的信息)而只是其亮度(Y 通道);根本原因在于相较于色差,人类视觉对亮度变化更为敏感。
Y only和YCbCr区别:
①Y only:基线方法,是一个单通道网络(c=1),只在亮度上进行了训练。对Cb、Cr通道采用双三次插值进行了扩展。②YCbCr:在YCbCr空间的三个通道上进行训练
代码中三个转换函数:
1. convert_rgb_to_y(img)
2. convert_rgb_to_ycbcr(img)
3. convert_ycbcr_to_rgb(img)
YCBCR:Y表示颜色的明亮度和浓度,也可叫灰度阶。(通过RGB转换YCBCR提取Y分量也可以得到灰度图像)
Cb:表示颜色的蓝色浓度偏移量即RGB输入信号蓝色部分与RGB信号亮度值之间的差异。
Cr:表示颜色的红色浓度偏移量即RGB输入信号红色部分与RGB信号亮度值之间的差异。
转换公式:
1、RGB转YCBCR
Y=0.257*R+0.564*G+0.098*B+16
Cb=-0.148*R-0.291*G+0.439*B+12
Cr=0.439*R-0.368*G-0.071*B+128
2、YCBCR转RGB
R=1.164*(Y-16)+1.596*(Cr-128)
G=1.164*(Y-16)-0.392*(Cb-128)-0.813*(Cr-128)
B=1.164*(Y-16)+2.017*(Cb-128)
3. model.parameters()与model.state_dict()的区别
区别:model.parameters()方法返回的是一个生成器generator,每一个元素是从开头到结尾的参数,parameters没有对应的key名称,是一个由纯参数组成的generator,而state_dict是一个字典,包含了一个key。
4. .item()函数的用法?
t.item()将Tensor变量转换为python标量(int float等),其中t是一个Tensor变量,只能是标量,转换后dtype与Tensor的dtype一致。
5.最后的测试过程步骤?
1.设置参数(训练好的权重,图片,放大倍数)
2.创建SRCNN模型,给模型赋值最优参数
3.对图像进行插值得到低分辨率图像
4.对Lr低分辨率图像的y颜色空间进行训练
5.计算PSNR值并输出
6.将转换为图像并进行输出
6.argparse的使用以及定义
argparse 模块是 Python 内置的用于命令项选项与参数解析的模块,argparse 模块可以让人轻松编写用户友好的命令行接口,能够帮助程序员为模型定义参数。
定义步骤
- 导入argparse包 ——import argparse
- 创建一个命令行解析器对象 ——创建 ArgumentParser() 对象
- 给解析器添加命令行参数 ——调用add_argument() 方法添加参数
- 解析命令行的参数 ——使用 parse_args() 解析添加的参数
7.unsqueeze与squeeze的使用
1.unsqueeze用法:在数组原来维度索引i之间增加一个维度
x = t.Tensor([[3, 4], [2, 7], [6, 9]]) # 3*2
y1 = x.unsqueeze(0) # 1*3*2
print(y1.size())
y2 = x.unsqueeze(1) # 3*1*2
print(y2.size())
y3 = x.unsqueeze(2) # 3*2*1
print(y3.size())
2.Squeeze用法:挤压掉tensor数据中维度特征数为1的维度
x = t.ones(1,1,2,3,1)
y1 = x.squeeze(0) # 1*2*3*1
print(y1.size())
y2 = x.squeeze(1) # 1*2*3*1
print(y2.size())
y3 = x.squeeze() # 2*3
print(y3.size())
8.对Python之if __name__ == ‘__main__‘的理解。
该代码片段只在运行脚本时执行,在import到其他脚本中不会执行,把文件当做脚本直接执行的时候这个时候__name__的值是:main,而被其它文件引用的时候就是文件本身的名字。
3.Code部分解读
model.py
from torch import nn
class SRCNN(nn.Module): #搭建SRCNN 3层卷积模型,Conve2d(输入层数,输出层数,卷积核大小,步长,填充层)
def __init__(self, num_channels=1):
super(SRCNN, self).__init__()
self.conv1 = nn.Conv2d(num_channels, 64, kernel_size=9, padding=9 // 2)
self.conv2 = nn.Conv2d(64, 32, kernel_size=5, padding=5 // 2)
self.conv3 = nn.Conv2d(32, num_channels, kernel_size=5, padding=5 // 2)
self.relu = nn.ReLU(inplace=True)
def forward(self, x):
x = self.relu(self.conv1(x))
x = self.relu(self.conv2(x))
x = self.conv3(x)
return xdataset.py
h5py文件格式
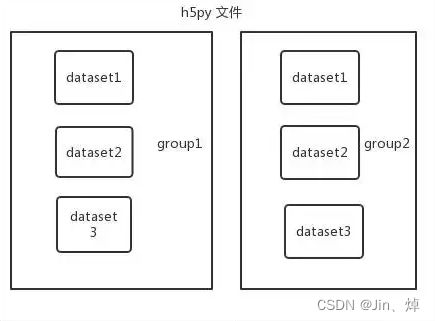
import h5py # 一个h5py文件是 “dataset” 和 “group” 二合一的容器。
import numpy as np
from torch.utils.data import Dataset
'''为这些数据创建一个读取类,以便torch中的DataLoader调用,而DataLoader中的内容则是Dataset,
所以新建的读取类需要继承Dataset,并实现其__getitem__和__len__这两个成员方法。
'''
class TrainDataset(Dataset): # 构建训练数据集,通过np.expand_dims将h5文件中的lr(低分辨率图像)和hr(高分辨率图像)组合为训练集
def __init__(self, h5_file):
super(TrainDataset, self).__init__()
self.h5_file = h5_file
def __getitem__(self, idx): #通过np.expand_dims方法得到组合的新数据
with h5py.File(self.h5_file, 'r') as f:
return np.expand_dims(f['lr'][idx] / 255., 0), np.expand_dims(f['hr'][idx] / 255., 0)
def __len__(self): #得到数据大小
with h5py.File(self.h5_file, 'r') as f:
return len(f['lr'])
# 与TrainDataset类似
class EvalDataset(Dataset): # 构建测试数据集,通过np.expand_dims将h5文件中的lr(低分辨率图像)和hr(高分辨率图像)组合为验证集
def __init__(self, h5_file):
super(EvalDataset, self).__init__()
self.h5_file = h5_file
def __getitem__(self, idx):
with h5py.File(self.h5_file, 'r') as f:
return np.expand_dims(f['lr'][str(idx)][:, :] / 255., 0), np.expand_dims(f['hr'][str(idx)][:, :] / 255., 0)
def __len__(self):
with h5py.File(self.h5_file, 'r') as f:
return len(f['lr'])prepare.py(制作自定义的训练和验证的h5格式的数据集)
import argparse
import glob
import h5py
import numpy as np
import PIL.Image as pil_image
from utils import convert_rgb_to_y
'''
训练数据集可手动生成,设放大倍数为scale,考虑到原始数据未必会被scale整除,所以要重新规划一下图像尺寸,所以训练数据集的生成分为三步:
1.将原始图像通过双三次插值重设尺寸,使之可被scale整除,作为高分辨图像数据HR
2.将HR通过双三次插值压缩scale倍,为低分辨图像的原始数据
3.将低分辨图像通过双三次插值放大scale倍,与HR图像维度相等,作为低分辨图像数据LR
最后,可通过h5py将训练数据分块并打包
'''
# 生成训练集
def train(args):
"""
def是python的关键字,用来定义函数。这里通过def定义名为train的函数,函数的参数为args,args这个参数通过外部命令行传入output
的路径,通过h5py.File()方法的w模式--创建文件自己自写,已经存在的文件会被覆盖,文件的路径是通过args.output_path来传入
"""
h5_file = h5py.File(args.output_path, 'w')
# #用于存储低分辨率和高分辨率的patch
lr_patches = []
hr_patches = []
for image_path in sorted(glob.glob('{}/*'.format(args.images_dir))):
'''
这部分代码的目的就是搜索指定文件夹下的文件并排序,for这一句包含了几个知识点:
1.{}.format():-->格式化输出函数,从args.images_dir路径中格式化输出路径
2.glob.glob():-->返回所有匹配的文件路径列表,将1得到的路径中的所有文件返回
3.sorted():-->排序,将2得到的所有文件按照某种顺序返回,,默认是升序
4.for x in *: -->循换输出
'''
#将照片转换为RGB通道
hr = pil_image.open(image_path).convert('RGB')
'''
1. *.open(): 是PIL图像库的函数,用来从image_path中加载图像
2. *.convert(): 是PIL图像库的函数, 用来转换图像的模式
'''
#取放大倍数的倍数, width, height为可被scale整除的训练数据尺寸
hr_width = (hr.width // args.scale) * args.scale
hr_height = (hr.height // args.scale) * args.scale
#图像大小调整,得到高分辨率图像Hr
hr = hr.resize((hr_width, hr_height), resample=pil_image.BICUBIC)
#低分辨率图像缩小
lr = hr.resize((hr_width // args.scale, hr_height // args.scale), resample=pil_image.BICUBIC)
#低分辨率图像放大,得到低分辨率图像Lr
lr = lr.resize((lr.width * args.scale, lr.height * args.scale), resample=pil_image.BICUBIC)
#转换为浮点并取ycrcb中的y通道
hr = np.array(hr).astype(np.float32)
lr = np.array(lr).astype(np.float32)
hr = convert_rgb_to_y(hr)
lr = convert_rgb_to_y(lr)
'''
np.array():将列表list或元组tuple转换为ndarray数组
astype():转换数组的数据类型
convert_rgb_to_y():将图像从RGB格式转换为Y通道格式的图片
假设原始输入图像为(321,481,3)-->依次为高,宽,通道数
1.先把图像转为可放缩的scale大小的图片,之后hr的图像尺寸为(320,480,3)
2.对hr图像进行双三次上采样放大操作
3.将hr//scale进行双三次上采样放大操作之后×scale得到lr
4.接着进行通道数转换和类型转换
'''
# 将数据分割
for i in range(0, lr.shape[0] - args.patch_size + 1, args.stride):
for j in range(0, lr.shape[1] - args.patch_size + 1, args.stride):
'''
图像的shape是宽度、高度和通道数,shape[0]是指图像的高度=320;shape[1]是图像的宽度=480; shape[2]是指图像的通道数
'''
lr_patches.append(lr[i:i + args.patch_size, j:j + args.patch_size])
hr_patches.append(hr[i:i + args.patch_size, j:j + args.patch_size])
lr_patches = np.array(lr_patches)
hr_patches = np.array(hr_patches)
#创建数据集,把得到的数据转化为数组类型
h5_file.create_dataset('lr', data=lr_patches)
h5_file.create_dataset('hr', data=hr_patches)
h5_file.close()
#下同,生成测试集
def eval(args):
h5_file = h5py.File(args.output_path, 'w')
lr_group = h5_file.create_group('lr')
hr_group = h5_file.create_group('hr')
for i, image_path in enumerate(sorted(glob.glob('{}/*'.format(args.images_dir)))):
hr = pil_image.open(image_path).convert('RGB')
hr_width = (hr.width // args.scale) * args.scale
hr_height = (hr.height // args.scale) * args.scale
hr = hr.resize((hr_width, hr_height), resample=pil_image.BICUBIC)
lr = hr.resize((hr_width // args.scale, hr_height // args.scale), resample=pil_image.BICUBIC)
lr = lr.resize((lr.width * args.scale, lr.height * args.scale), resample=pil_image.BICUBIC)
hr = np.array(hr).astype(np.float32)
lr = np.array(lr).astype(np.float32)
hr = convert_rgb_to_y(hr)
lr = convert_rgb_to_y(lr)
lr_group.create_dataset(str(i), data=lr)
hr_group.create_dataset(str(i), data=hr)
h5_file.close()
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--images-dir', type=str, required=True)
parser.add_argument('--output-path', type=str, required=True)
parser.add_argument('--patch-size', type=int, default=32)
parser.add_argument('--stride', type=int, default=14)
parser.add_argument('--scale', type=int, default=4)
parser.add_argument('--eval', action='store_true') #store_flase就是存储一个bool值true,也就是说在该参数在被激活时它会输出store存储的值true。
args = parser.parse_args()
#决定使用哪个函数来生成h5文件,因为有俩个不同的函数train和eval生成对应的h5文件。
if not args.eval:
train(args)
else:
eval(args)
train.py(训练SRCNN模型,得到最优参数)
import argparse
import os
import copy
import numpy as np
from torch import Tensor
import torch
from torch import nn
import torch.optim as optim
# gpu加速库
import torch.backends.cudnn as cudnn
from torch.utils.data.dataloader import DataLoader
# 进度条
from tqdm import tqdm
from models import SRCNN
from datasets import TrainDataset, EvalDataset
from utils import AverageMeter, calc_psnr
##需要修改的参数
# epoch.pth
# losslog
# psnrlog
# best.pth
'''
python train.py --train-file "path_to_train_file" \
--eval-file "path_to_eval_file" \
--outputs-dir "path_to_outputs_file" \
--scale 3 \
--lr 1e-4 \
--batch-size 16 \
--num-epochs 400 \
--num-workers 0 \
--seed 123
'''
if __name__ == '__main__':
# 初始参数设定
parser = argparse.ArgumentParser() # argparse是python用于解析命令行参数和选项的标准模块
parser.add_argument('--train-file', type=str, required=True,) # 训练 h5文件目录
parser.add_argument('--eval-file', type=str, required=True) # 测试 h5文件目录
parser.add_argument('--outputs-dir', type=str, required=True) #模型 .pth保存目录
parser.add_argument('--scale', type=int, default=3) # 放大倍数
parser.add_argument('--lr', type=float, default=1e-4) #学习率
parser.add_argument('--batch-size', type=int, default=16) # 一次处理的图片大小
parser.add_argument('--num-workers', type=int, default=0) # 线程数
parser.add_argument('--num-epochs', type=int, default=400) #训练次数
parser.add_argument('--seed', type=int, default=123) # 随机种子
args = parser.parse_args()
# 输出放入固定文件夹里
args.outputs_dir = os.path.join(args.outputs_dir, 'x{}'.format(args.scale))
# 没有该文件夹就新建一个文件夹
if not os.path.exists(args.outputs_dir):
os.makedirs(args.outputs_dir)
# benckmark模式,加速计算,但寻找最优配置,计算的前馈结果会有差异
cudnn.benchmark = True
# gpu或者cpu模式,取决于当前cpu是否可用
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
# 每次程序运行生成的随机数固定
torch.manual_seed(args.seed)
# 构建SRCNN模型,并且放到device上训练
model = SRCNN().to(device)
# 恢复训练,从之前结束的那个地方开始
# model.load_state_dict(torch.load('outputs/x3/epoch_173.pth'))
# 设置损失函数为MSE
criterion = nn.MSELoss()
# 优化函数Adam,lr代表学习率,
optimizer = optim.Adam([
{'params': model.conv1.parameters()},
{'params': model.conv2.parameters()},
{'params': model.conv3.parameters(), 'lr': args.lr * 0.1}
], lr=args.lr)
# 预处理训练集
train_dataset = TrainDataset(args.train_file)
train_dataloader = DataLoader(
# 数据
dataset=train_dataset,
# 分块
batch_size=args.batch_size,
# 数据集数据洗牌,打乱后取batch
shuffle=True,
# 工作进程,像是虚拟存储器中的页表机制
num_workers=args.num_workers,
# 锁页内存,不换出内存,生成的Tensor数据是属于内存中的锁页内存区
pin_memory=True,
# 不取余,丢弃不足batchSize大小的图像
drop_last=True)
# 预处理验证集
eval_dataset = EvalDataset(args.eval_file)
eval_dataloader = DataLoader(dataset=eval_dataset, batch_size=1)
# 拷贝权重
best_weights = copy.deepcopy(model.state_dict())
best_epoch = 0
best_psnr = 0.0
# 画图用
lossLog = []
psnrLog = []
# 恢复训练
# for epoch in range(args.num_epochs):
for epoch in range(1, args.num_epochs + 1):
# for epoch in range(174, 400):
# 模型训练入口
model.train()
# 变量更新,计算epoch平均损失
epoch_losses = AverageMeter()
# 进度条,就是不要不足batchsize的部分
with tqdm(total=(len(train_dataset) - len(train_dataset) % args.batch_size)) as t:
# t.set_description('epoch:{}/{}'.format(epoch, args.num_epochs - 1))
t.set_description('epoch:{}/{}'.format(epoch, args.num_epochs))
# 每个batch计算一次
for data in train_dataloader:
# 对应datastes.py中的__getItem__,分别为lr,hr图像
inputs, labels = data
inputs = inputs.to(device)
labels = labels.to(device)
# 送入模型训练
preds = model(inputs)
# 获得损失
loss = criterion(preds, labels)
# 显示损失值与长度
epoch_losses.update(loss.item(), len(inputs))
# 梯度清零
optimizer.zero_grad()
# 反向传播
loss.backward()
# 更新参数
optimizer.step()
# 进度条更新
t.set_postfix(loss='{:.6f}'.format(epoch_losses.avg))
t.update(len(inputs))
# 记录lossLog 方面画图
lossLog.append(np.array(epoch_losses.avg))
# 可以在前面加上路径
np.savetxt("lossLog.txt", lossLog)
# 保存模型
torch.save(model.state_dict(), os.path.join(args.outputs_dir, 'epoch_{}.pth'.format(epoch)))
# 是否更新当前最好参数
model.eval()
epoch_psnr = AverageMeter()
for data in eval_dataloader:
inputs, labels = data
inputs = inputs.to(device)
labels = labels.to(device)
# 验证不用求导
with torch.no_grad():
preds = model(inputs).clamp(0.0, 1.0)
epoch_psnr.update(calc_psnr(preds, labels), len(inputs))
print('eval psnr: {:.2f}'.format(epoch_psnr.avg))
# 记录psnr
psnrLog.append(Tensor.cpu(epoch_psnr.avg))
np.savetxt('psnrLog.txt', psnrLog)
# 找到更好的权重参数,更新
if epoch_psnr.avg > best_psnr:
best_epoch = epoch
best_psnr = epoch_psnr.avg
best_weights = copy.deepcopy(model.state_dict())
print('best epoch: {}, psnr: {:.2f}'.format(best_epoch, best_psnr))
torch.save(best_weights, os.path.join(args.outputs_dir, 'best.pth'))
print('best epoch: {}, psnr: {:.2f}'.format(best_epoch, best_psnr))
torch.save(best_weights, os.path.join(args.outputs_dir, 'best.pth'))
utils.py(工具包)
import torch
import numpy as np
"""
只操作y通道
因为我们感兴趣的不是颜色变化(存储在 CbCr 通道中的信息)而只是其亮度(Y 通道);
根本原因在于相较于色差,人类视觉对亮度变化更为敏感。
"""
def convert_rgb_to_y(img):
if type(img) == np.ndarray:
return 16. + (64.738 * img[:, :, 0] + 129.057 * img[:, :, 1] + 25.064 * img[:, :, 2]) / 256.
elif type(img) == torch.Tensor:
if len(img.shape) == 4:
img = img.squeeze(0)
return 16. + (64.738 * img[0, :, :] + 129.057 * img[1, :, :] + 25.064 * img[2, :, :]) / 256.
else:
raise Exception('Unknown Type', type(img))
"""
RGB转YCBCR
Y=0.257*R+0.564*G+0.098*B+16
Cb=-0.148*R-0.291*G+0.439*B+128
Cr=0.439*R-0.368*G-0.071*B+128
"""
def convert_rgb_to_ycbcr(img):
if type(img) == np.ndarray:
y = 16. + (64.738 * img[:, :, 0] + 129.057 * img[:, :, 1] + 25.064 * img[:, :, 2]) / 256.
cb = 128. + (-37.945 * img[:, :, 0] - 74.494 * img[:, :, 1] + 112.439 * img[:, :, 2]) / 256.
cr = 128. + (112.439 * img[:, :, 0] - 94.154 * img[:, :, 1] - 18.285 * img[:, :, 2]) / 256.
return np.array([y, cb, cr]).transpose([1, 2, 0])
elif type(img) == torch.Tensor:
if len(img.shape) == 4:
img = img.squeeze(0)
y = 16. + (64.738 * img[0, :, :] + 129.057 * img[1, :, :] + 25.064 * img[2, :, :]) / 256.
cb = 128. + (-37.945 * img[0, :, :] - 74.494 * img[1, :, :] + 112.439 * img[2, :, :]) / 256.
cr = 128. + (112.439 * img[0, :, :] - 94.154 * img[1, :, :] - 18.285 * img[2, :, :]) / 256.
return torch.cat([y, cb, cr], 0).permute(1, 2, 0)
else:
raise Exception('Unknown Type', type(img))
"""
YCBCR转RGB
R=1.164*(Y-16)+1.596*(Cr-128)
G=1.164*(Y-16)-0.392*(Cb-128)-0.813*(Cr-128)
B=1.164*(Y-16)+2.017*(Cb-128)
"""
def convert_ycbcr_to_rgb(img):
if type(img) == np.ndarray:
r = 298.082 * img[:, :, 0] / 256. + 408.583 * img[:, :, 2] / 256. - 222.921
g = 298.082 * img[:, :, 0] / 256. - 100.291 * img[:, :, 1] / 256. - 208.120 * img[:, :, 2] / 256. + 135.576
b = 298.082 * img[:, :, 0] / 256. + 516.412 * img[:, :, 1] / 256. - 276.836
return np.array([r, g, b]).transpose([1, 2, 0])
elif type(img) == torch.Tensor:
if len(img.shape) == 4:
img = img.squeeze(0)
r = 298.082 * img[0, :, :] / 256. + 408.583 * img[2, :, :] / 256. - 222.921
g = 298.082 * img[0, :, :] / 256. - 100.291 * img[1, :, :] / 256. - 208.120 * img[2, :, :] / 256. + 135.576
b = 298.082 * img[0, :, :] / 256. + 516.412 * img[1, :, :] / 256. - 276.836
return torch.cat([r, g, b], 0).permute(1, 2, 0)
else:
raise Exception('Unknown Type', type(img))
# PSNR 计算
def calc_psnr(img1, img2):
return 10. * torch.log10(1. / torch.mean((img1 - img2) ** 2))
# 计算 平均数,求和,长度
class AverageMeter(object):
def __init__(self):
self.reset()
def reset(self):
self.val = 0
self.avg = 0
self.sum = 0
self.count = 0
def update(self, val, n=1):
self.val = val
self.sum += val * n
self.count += n
self.avg = self.sum / self.count
test.py
import argparse
import torch
import torch.backends.cudnn as cudnn
import numpy as np
import PIL.Image as pil_image
from models import SRCNN
from utils import convert_rgb_to_ycbcr, convert_ycbcr_to_rgb, calc_psnr
if __name__ == '__main__':
# 设置权重参数目录,处理图像目录,放大倍数
parser = argparse.ArgumentParser()
parser.add_argument('--weights-file', default='outputs/x3/best.pth', type=str)
parser.add_argument('--image-file', default='img/butterfly_GT.bmp', type=str)
parser.add_argument('--scale', type=int, default=3)
args = parser.parse_args()
# Benchmark模式会提升计算速度
cudnn.benchmark = True
device = torch.device('cuda:0' if torch.cuda.is_available() else 'cpu')
model = SRCNN().to(device) # 新建一个模型
state_dict = model.state_dict() # 通过 model.state_dict()得到模型有哪些 parameters and persistent buffers
# torch.load('tensors.pth', map_location=lambda storage, loc: storage) 使用函数将所有张量加载到CPU(适用在GPU训练的模型在CPU上加载)
for n, p in torch.load(args.weights_file, map_location=lambda storage, loc: storage).items(): # 载入最好的模型参数
if n in state_dict.keys():
state_dict[n].copy_(p)
else:
raise KeyError(n)
model.eval() # 切换为测试模式 ,取消dropout
image = pil_image.open(args.image_file).convert('RGB') # 将图片转为RGB类型
# 经过一个插值操作,首先将原始图片重设尺寸,使之可以被放大倍数scale整除
# 得到低分辨率图像Lr,即三次插值后的图像,同时保存输出
image_width = (image.width // args.scale) * args.scale
image_height = (image.height // args.scale) * args.scale
image = image.resize((image_width, image_height), resample=pil_image.BICUBIC)
image = image.resize((image.width // args.scale, image.height // args.scale), resample=pil_image.BICUBIC)
image = image.resize((image.width * args.scale, image.height * args.scale), resample=pil_image.BICUBIC)
image.save(args.image_file.replace('.', '_bicubic_x{}.'.format(args.scale)))
# 将图像转化为数组类型,同时图像转为ycbcr类型
image = np.array(image).astype(np.float32)
ycbcr = convert_rgb_to_ycbcr(image)
# 得到 ycbcr中的 y 通道
y = ycbcr[..., 0]
y /= 255. # 归一化处理
y = torch.from_numpy(y).to(device) #把数组转换成张量,且二者共享内存,对张量进行修改比如重新赋值,那么原始数组也会相应发生改变,并且将参数放到device上
y = y.unsqueeze(0).unsqueeze(0) # 增加两个维度
# 令reqires_grad自动设为False,关闭自动求导
# clamp将inputs归一化为0到1区间
with torch.no_grad():
preds = model(y).clamp(0.0, 1.0)
psnr = calc_psnr(y, preds) # 计算y通道的psnr值
print('PSNR: {:.2f}'.format(psnr)) # 格式化输出PSNR值
# 1.mul函数类似矩阵.*,即每个元素×255
# 2. *.cpu().numpy() 将数据的处理设备从其他设备(如gpu拿到cpu上),不会改变变量类型,转换后仍然是Tensor变量,同时将Tensor转化为ndarray
# 3. *.squeeze(0).squeeze(0)数据的维度进行压缩
preds = preds.mul(255.0).cpu().numpy().squeeze(0).squeeze(0) #得到的是经过模型处理,取值在[0,255]的y通道图像
# 将img的数据格式由(channels,imagesize,imagesize)转化为(imagesize,imagesize,channels),进行格式的转换后方可进行显示。
output = np.array([preds, ycbcr[..., 1], ycbcr[..., 2]]).transpose([1, 2, 0])
output = np.clip(convert_ycbcr_to_rgb(output), 0.0, 255.0).astype(np.uint8) # 将图像格式从ycbcr转为rgb,限制取值范围[0,255],同时矩阵元素类型为uint8类型
output = pil_image.fromarray(output) # array转换成image,即将矩阵转为图像
output.save(args.image_file.replace('.', '_srcnn_x{}.'.format(args.scale))) # 对图像进行保存
4.实验结果展示


original bicubic_x3 SRCNN_x3
SRCNN:PSNR: 27.61

original bicubic_x3 SRCNN_x3
SRCNN:PSNR: 29.17
GitHub项目地址传送门:SRCNN_Pytorch