机器学习笔记——支持向量机(3)——原问题和对偶问题
引言
在上一节我们介绍了支持向量机svm解决非线性相关的问题。如何利用已知的K和未知的ψ去解决优化问题是关键。在这一节将针对原问题原对偶问题进行学习。
优化理论
原问题(Prime Problem)
最小化:f (ω)
限制条件:① gi(ω)<=0 ( i=1~K );② hi(ω)=0 ( i=1~M )
原问题是一个非常普适(general)的定义。
首先,最小化中 ω 是自变量,同时也是向量,待优化参数的自变量。f 是其函数。对于最小化的 f(ω),有最大化的 - f (ω)。
而在限制条件中,分别有K个不等式与M个不等式。对于①式左右两边同时添加负号变为大于等于;对于②式可以变形为 hi(ω) -c =0
综上,原问题具有普适性。
对偶问题(Dural Problem)
定义
L(ω,α,β)
在这个函数中存在三个变量,变量ω是已知的,与原问题中一致。而变量α,β的维度与原问题限制条件保持一致,因此为K维与M维。
对偶问题的定义
最大化:

限制条件: αi >=0 (i=1~K)
最大化中的函数 L 在前面已经定义。inf 称为求最小值,也就是求得后面括号中 L 的最小值。它在固定了α,β的情况下,便历所有的ω,求出L的最小值。 因此我们每确定一个α,β,都会得到一个确定的值,因此这是一个关于α,β的函数θ,与ω无关。 最后,我们针对所有的α,β,求出关于θ的最大值。
原问题与对偶问题的关系
定理:如果 ω* 是原问题的解,而 α* 和 β* 是对偶问题的解,则有:

下面给出证明过程


可得上式等号左右两侧均小于 f(ω)
定义

这里G叫做 原问题与对偶问题的间距(Duality Gap)
对于某一些特定的优化问题,可以证明G=0
强对偶定理
若f(ω)为凸函数,且g(ω)=Aω+b,h(ω)=Cω+d, 则此优化问题的原问题与对偶问题间距为0 即 f(ω*)=θ(α*,β*)
若该等式成立,则由证明过程可以得出 对于∀i=1~K , 要么α*i=0 ,要么g*i(ω*)=0
——————————分割线————————————————————
现在,我们针对svm,提出:
最小化
两个限制条件
在这里,有最小化对应了原问题的 (ω),同时该最小化时式为凸函数(参考二次函数二次项系数为负的函数图像)
关于凸函数,有:
对于∀ω1,ω2,∀λ∈[0,1]

其实这个性质在几何层次上可以轻松被证明,但是我们依然要提出代数层面的解答。原因在于:几何层面的理解仅仅针对于二维平面,而在代数式中的ω1,ω2可以为一个数,同样可以为一个向量,更高维度的自变量。代数式提出了更高维度的解答。
对于这两个限制条件,其与原问题的线性条件存在偏差(大于等于号),因此我们想办法来弥补这个偏差。
修正
最小化:
两个限制条件:
原文题中的g(ω)对应了这里的两个限制条件,于是在这里共有2K个式子(i=1~K),h(ω)没有对应。
接下来把它写成对偶问题
对偶问题
最大化
 inf函数关于所有的ω,ξi,b
inf函数关于所有的ω,ξi,b
式中αi,βi均对应原问题中的α
而原文题中的β在这里是没有的
限制条件
原问题中的α对应式中αi,βi
接下来,我们尝试对这个复杂的最大化式子进行推导,求出在大化θ在满足何条件时最小。
让L分别关于ω,ξi,b进行求导,得到
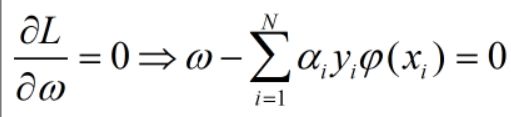

即上述三式均满足时,θ(α,β)最小
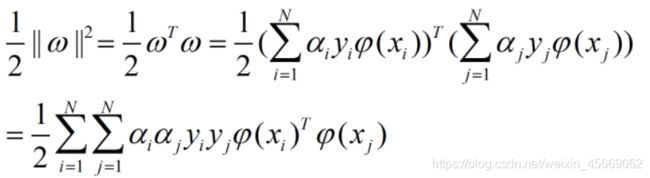
那么如果要求得最小的θ值,那么我们只需要将上述三式的值代入原式
先分部计算,再统一加和
第一项
第二项
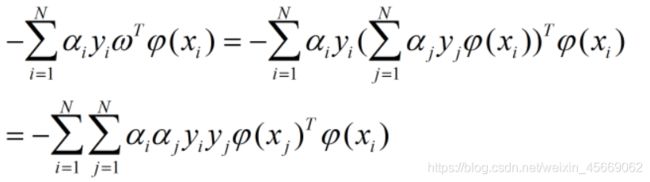
上述第一项与第二项中关于ψ的项可以单独取出,定义为K(xi,yi)
最后将两项相加,得到如下答案

限制条件
在解决了这个问题之后,我们成功的求出了α,但问题的本质依旧在于求出ω和b。那么如何利用求出的α转化求出ω和b呢?
测试流程
将测试样本x输入
若 ωT ψ(x)+b >= 0 , 则y=+1
若 ωT ψ(x)+b < 0 , 则y=-1
在这里我们可以不知道 ω,只需要知道ωT ψ(x)+b便可解决问题
再将前面得到的ωT代入,得到
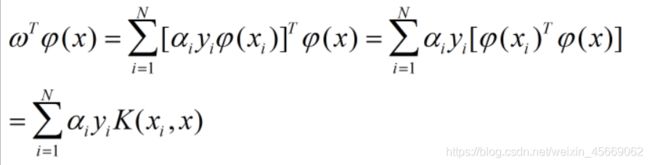
由此可知,我们不见得需要知道ωT ψ(x),只需知道核函数并带入参数,就可以得到ωT ψ(x)的结果
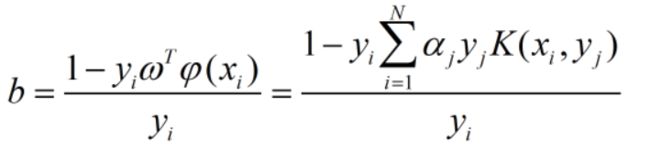
我们再来讨论b的解法
求解b
这里需要使用到KKT条件
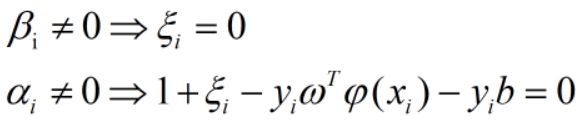
KKT条件放在这里的svm中,可以写为:
1.要么 βi = 0,要么ξi = 0
2.要么 αi = 0,要么 1+ ξi - yiωTψ(xi) - yib = 0
取一个0 < αi
此时
最后将等式变形
(创作不易 ,如需转载请联系作者)