本文将展示如何使用JAX/Flax实现Vision Transformer (ViT),以及如何使用JAX/Flax训练ViT。
Vision Transformer
在实现Vision Transformer时,首先要记住这张图。
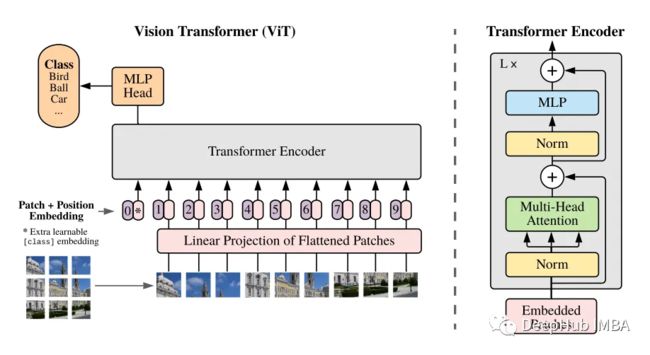
以下是论文描述的ViT执行过程。
从输入图像中提取补丁图像,并将其转换为平面向量。
投影到 Transformer Encoder 来处理的维度
预先添加一个可学习的嵌入([class]标记),并添加一个位置嵌入。
由 Transformer Encoder 进行编码处理
使用[class]令牌作为输出,输入到MLP进行分类。
细节实现
下面,我们将使用JAX/Flax创建每个模块。
1、图像到展平的图像补丁
下面的代码从输入图像中提取图像补丁。这个过程通过卷积来实现,内核大小为patch_size patch_size, stride为patch_size patch_size,以避免重复。
classPatches(nn.Module):
patch_size: int
embed_dim: int
defsetup(self):
self.conv=nn.Conv(
features=self.embed_dim,
kernel_size=(self.patch_size, self.patch_size),
strides=(self.patch_size, self.patch_size),
padding='VALID'
)
def__call__(self, images):
patches=self.conv(images)
b, h, w, c=patches.shape
patches=jnp.reshape(patches, (b, h*w, c))
returnpatches2和3、对展平补丁块的线性投影/添加[CLS]标记/位置嵌入
Transformer Encoder 对所有层使用相同的尺寸大小hidden_dim。上面创建的补丁块向量被投影到hidden_dim维度向量上。与BERT一样,有一个CLS令牌被添加到序列的开头,还增加了一个可学习的位置嵌入来保存位置信息。
classPatchEncoder(nn.Module):
hidden_dim: int
@nn.compact
def__call__(self, x):
assertx.ndim==3
n, seq_len, _=x.shape
# Hidden dim
x=nn.Dense(self.hidden_dim)(x)
# Add cls token
cls=self.param('cls_token', nn.initializers.zeros, (1, 1, self.hidden_dim))
cls=jnp.tile(cls, (n, 1, 1))
x=jnp.concatenate([cls, x], axis=1)
# Add position embedding
pos_embed=self.param(
'position_embedding',
nn.initializers.normal(stddev=0.02), # From BERT
(1, seq_len+1, self.hidden_dim)
)
returnx+pos_embed4、Transformer encoder
如上图所示,编码器由多头自注意(MSA)和MLP交替层组成。Norm层 (LN)在MSA和MLP块之前,残差连接在块之后。
classTransformerEncoder(nn.Module):
embed_dim: int
hidden_dim: int
n_heads: int
drop_p: float
mlp_dim: int
defsetup(self):
self.mha=MultiHeadSelfAttention(self.hidden_dim, self.n_heads, self.drop_p)
self.mlp=MLP(self.mlp_dim, self.drop_p)
self.layer_norm=nn.LayerNorm(epsilon=1e-6)
def__call__(self, inputs, train=True):
# Attention Block
x=self.layer_norm(inputs)
x=self.mha(x, train)
x=inputs+x
# MLP block
y=self.layer_norm(x)
y=self.mlp(y, train)
returnx+yMLP是一个两层网络。激活函数是GELU。本文将Dropout应用于Dense层之后。
classMLP(nn.Module):
mlp_dim: int
drop_p: float
out_dim: Optional[int] =None
@nn.compact
def__call__(self, inputs, train=True):
actual_out_dim=inputs.shape[-1] ifself.out_dimisNoneelseself.out_dim
x=nn.Dense(features=self.mlp_dim)(inputs)
x=nn.gelu(x)
x=nn.Dropout(rate=self.drop_p, deterministic=nottrain)(x)
x=nn.Dense(features=actual_out_dim)(x)
x=nn.Dropout(rate=self.drop_p, deterministic=nottrain)(x)
returnx多头自注意(MSA)
qkv的形式应为[B, N, T, D],如Single Head中计算权重和注意力后,应输出回原维度[B, T, C=N*D]。
classMultiHeadSelfAttention(nn.Module):
hidden_dim: int
n_heads: int
drop_p: float
defsetup(self):
self.q_net=nn.Dense(self.hidden_dim)
self.k_net=nn.Dense(self.hidden_dim)
self.v_net=nn.Dense(self.hidden_dim)
self.proj_net=nn.Dense(self.hidden_dim)
self.att_drop=nn.Dropout(self.drop_p)
self.proj_drop=nn.Dropout(self.drop_p)
def__call__(self, x, train=True):
B, T, C=x.shape# batch_size, seq_length, hidden_dim
N, D=self.n_heads, C//self.n_heads# num_heads, head_dim
q=self.q_net(x).reshape(B, T, N, D).transpose(0, 2, 1, 3) # (B, N, T, D)
k=self.k_net(x).reshape(B, T, N, D).transpose(0, 2, 1, 3)
v=self.v_net(x).reshape(B, T, N, D).transpose(0, 2, 1, 3)
# weights (B, N, T, T)
weights=jnp.matmul(q, jnp.swapaxes(k, -2, -1)) /math.sqrt(D)
normalized_weights=nn.softmax(weights, axis=-1)
# attention (B, N, T, D)
attention=jnp.matmul(normalized_weights, v)
attention=self.att_drop(attention, deterministic=nottrain)
# gather heads
attention=attention.transpose(0, 2, 1, 3).reshape(B, T, N*D)
# project
out=self.proj_drop(self.proj_net(attention), deterministic=nottrain)
returnout5、使用CLS嵌入进行分类
最后MLP头(分类头)。
classViT(nn.Module):
patch_size: int
embed_dim: int
hidden_dim: int
n_heads: int
drop_p: float
num_layers: int
mlp_dim: int
num_classes: int
defsetup(self):
self.patch_extracter=Patches(self.patch_size, self.embed_dim)
self.patch_encoder=PatchEncoder(self.hidden_dim)
self.dropout=nn.Dropout(self.drop_p)
self.transformer_encoder=TransformerEncoder(self.embed_dim, self.hidden_dim, self.n_heads, self.drop_p, self.mlp_dim)
self.cls_head=nn.Dense(features=self.num_classes)
def__call__(self, x, train=True):
x=self.patch_extracter(x)
x=self.patch_encoder(x)
x=self.dropout(x, deterministic=nottrain)
foriinrange(self.num_layers):
x=self.transformer_encoder(x, train)
# MLP head
x=x[:, 0] # [CLS] token
x=self.cls_head(x)
returnx使用JAX/Flax训练
现在已经创建了模型,下面就是使用JAX/Flax来训练。
数据集
这里我们直接使用 torchvision的CIFAR10.
首先是一些工具函数
defimage_to_numpy(img):
img=np.array(img, dtype=np.float32)
img= (img/255.-DATA_MEANS) /DATA_STD
returnimg
defnumpy_collate(batch):
ifisinstance(batch[0], np.ndarray):
returnnp.stack(batch)
elifisinstance(batch[0], (tuple, list)):
transposed=zip(*batch)
return [numpy_collate(samples) forsamplesintransposed]
else:
returnnp.array(batch)然后是训练和测试的dataloader
test_transform=image_to_numpy
train_transform=transforms.Compose([
transforms.RandomHorizontalFlip(),
transforms.RandomResizedCrop((IMAGE_SIZE, IMAGE_SIZE), scale=CROP_SCALES, ratio=CROP_RATIO),
image_to_numpy
])
# Validation set should not use the augmentation.
train_dataset=CIFAR10('data', train=True, transform=train_transform, download=True)
val_dataset=CIFAR10('data', train=True, transform=test_transform, download=True)
train_set, _=torch.utils.data.random_split(train_dataset, [45000, 5000], generator=torch.Generator().manual_seed(SEED))
_, val_set=torch.utils.data.random_split(val_dataset, [45000, 5000], generator=torch.Generator().manual_seed(SEED))
test_set=CIFAR10('data', train=False, transform=test_transform, download=True)
train_loader=torch.utils.data.DataLoader(
train_set, batch_size=BATCH_SIZE, shuffle=True, drop_last=True, num_workers=2, persistent_workers=True, collate_fn=numpy_collate,
)
val_loader=torch.utils.data.DataLoader(
val_set, batch_size=BATCH_SIZE, shuffle=False, drop_last=False, num_workers=2, persistent_workers=True, collate_fn=numpy_collate,
)
test_loader=torch.utils.data.DataLoader(
test_set, batch_size=BATCH_SIZE, shuffle=False, drop_last=False, num_workers=2, persistent_workers=True, collate_fn=numpy_collate,
)初始化模型
初始化ViT模型
definitialize_model(
seed=42,
patch_size=16, embed_dim=192, hidden_dim=192,
n_heads=3, drop_p=0.1, num_layers=12, mlp_dim=768, num_classes=10
):
main_rng=jax.random.PRNGKey(seed)
x=jnp.ones(shape=(5, 32, 32, 3))
# ViT
model=ViT(
patch_size=patch_size,
embed_dim=embed_dim,
hidden_dim=hidden_dim,
n_heads=n_heads,
drop_p=drop_p,
num_layers=num_layers,
mlp_dim=mlp_dim,
num_classes=num_classes
)
main_rng, init_rng, drop_rng=random.split(main_rng, 3)
params=model.init({'params': init_rng, 'dropout': drop_rng}, x, train=True)['params']
returnmodel, params, main_rng
vit_model, vit_params, vit_rng=initialize_model()创建TrainState
在Flax中常见的模式是创建管理训练的状态的类,包括轮次、优化器状态和模型参数等等。还可以通过在apply_fn中指定apply_fn来减少学习循环中的函数参数列表,apply_fn对应于模型的前向传播。
defcreate_train_state(
model, params, learning_rate
):
optimizer=optax.adam(learning_rate)
returntrain_state.TrainState.create(
apply_fn=model.apply,
tx=optimizer,
params=params
)
state=create_train_state(vit_model, vit_params, 3e-4)循环训练
deftrain_model(train_loader, val_loader, state, rng, num_epochs=100):
best_eval=0.0
forepoch_idxintqdm(range(1, num_epochs+1)):
state, rng=train_epoch(train_loader, epoch_idx, state, rng)
ifepoch_idx%1==0:
eval_acc=eval_model(val_loader, state, rng)
logger.add_scalar('val/acc', eval_acc, global_step=epoch_idx)
ifeval_acc>=best_eval:
best_eval=eval_acc
save_model(state, step=epoch_idx)
logger.flush()
# Evaluate after training
test_acc=eval_model(test_loader, state, rng)
print(f'test_acc: {test_acc}')
deftrain_epoch(train_loader, epoch_idx, state, rng):
metrics=defaultdict(list)
forbatchintqdm(train_loader, desc='Training', leave=False):
state, rng, loss, acc=train_step(state, rng, batch)
metrics['loss'].append(loss)
metrics['acc'].append(acc)
forkeyinmetrics.keys():
arg_val=np.stack(jax.device_get(metrics[key])).mean()
logger.add_scalar('train/'+key, arg_val, global_step=epoch_idx)
print(f'[epoch {epoch_idx}] {key}: {arg_val}')
returnstate, rng验证
defeval_model(data_loader, state, rng):
# Test model on all images of a data loader and return avg loss
correct_class, count=0, 0
forbatchindata_loader:
rng, acc=eval_step(state, rng, batch)
correct_class+=acc*batch[0].shape[0]
count+=batch[0].shape[0]
eval_acc= (correct_class/count).item()
returneval_acc训练步骤
在train_step中定义损失函数,计算模型参数的梯度,并根据梯度更新参数;在value_and_gradients方法中,计算状态的梯度。在apply_gradients中,更新TrainState。交叉熵损失是通过apply_fn(与model.apply相同)计算logits来计算的,apply_fn是在创建TrainState时指定的。
@jax.jit
deftrain_step(state, rng, batch):
loss_fn=lambdaparams: calculate_loss(params, state, rng, batch, train=True)
# Get loss, gradients for loss, and other outputs of loss function
(loss, (acc, rng)), grads=jax.value_and_grad(loss_fn, has_aux=True)(state.params)
# Update parameters and batch statistics
state=state.apply_gradients(grads=grads)
returnstate, rng, loss, acc计算损失
defcalculate_loss(params, state, rng, batch, train):
imgs, labels=batch
rng, drop_rng=random.split(rng)
logits=state.apply_fn({'params': params}, imgs, train=train, rngs={'dropout': drop_rng})
loss=optax.softmax_cross_entropy_with_integer_labels(logits=logits, labels=labels).mean()
acc= (logits.argmax(axis=-1) ==labels).mean()
returnloss, (acc, rng)结果
训练结果如下所示。在Colab pro的标准GPU上,训练时间约为1.5小时。
test_acc: 0.7704000473022461如果你对JAX感兴趣,请看这里是本文的完整代码:
https://avoid.overfit.cn/post/926b7965ba56464ba151cbbfb6a98a93
作者:satojkovic