什么是soft matting方法_NMS、 soft-nms、softer-nms
NMS检测框合并策略
一.NMS
1.NMS算法过程
NMS主要就是通过迭代的形式,不断的以最大得分的框去与其他框做IoU操作,并过滤那些IoU较大(即交集较大)的框。

①根据候选框的类别分类概率做排序,假如有4个 BBox ,其置信度A>B>C>D。
②先标记最大概率矩形框A是算法要保留的BBox;
③从最大概率矩形框A开始,分别判断ABC与D的重叠度IOU(两框的交并比)是否大于某个设定的阈值(0.5),假设D与A的重叠度超过阈值,那么就舍弃D;
④从剩下的矩形框BC中,选择概率最大的B,标记为保留,然后判断C与B的重叠度,扔掉重叠度超过设定阈值的矩形框;
⑤一直重复进行,标记完所有要保留下来的矩形框。
two stage算法,通常在选出BBox有BBox位置(x,y,h,w)和是否是目标的概率,没有具体类别的概率。因为程序是生成BBox,再将选择的BBox的feature map做rescale (一般用ROI pooling),然后再用分类器分类。NMS一般只能在CPU计算,这也是two stage相对耗时的原因。
但如果是one stage做法,BBox有位置信息(x,y,h,w)、confidence score,以及类别概率,相对于two stage少了后面的rescale和分类程序,所以计算量相对少。
2.NMS缺点
1、NMS算法中的最大问题就是它将相邻检测框的分数均强制归零(即将重叠部分大于重叠阈值Nt的检测框移除)。在这种情况下,如果一个真实物体在重叠区域出现,则将导致对该物体的检测失败并降低了算法的平均检测率。
2、NMS的阈值也不太容易确定,设置过小会出现误删,设置过高又容易增大误检。
3、NMS一般只能使用CPU计算,无法使用GPU计算。
3.假设这是一个函数,那么这个函数输入输出是什么,中间操作又是怎么做的
输入是各种bouding box的位置坐标信息B及其对应分数S,以及阈值threshold,操作流程可见下图。
二.soft-nms
1.算法流程
NMS算法是略显粗暴,因为NMS直接将删除所有IoU大于阈值的框。soft-NMS吸取了NMS的教训,在算法执行过程中不是简单的对IoU大于阈值的检测框删除,而是降低得分。算法流程同NMS相同,但是对原置信度得分使用函数运算,目标是降低置信度得分.

bi为待处理BBox框,B为待处理BBox框集合,si是bi框更新得分,Nt是NMS的阈值,D集合用来放最终的BBox,f是置信度得分的重置函数。 bi和M的IOU越大,bi的得分si就下降的越厉害。
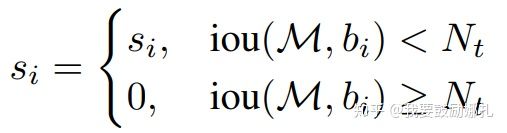
经典的NMS算法将IOU大于阈值的窗口的得分全部置为0,可表述如下:
论文置信度重置函数有两种形式改进,一种是线性加权的:

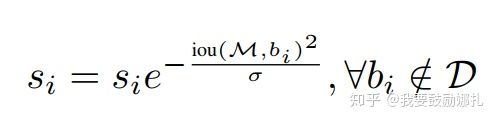
一种是高斯加权形式:
具体代码实现:
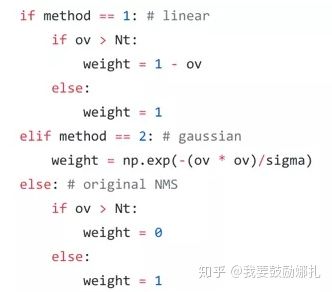
可以明显看到soft-NMS最重要是更新weight变量的值。采用线性加权时,更新为1-ov,高斯加权时引入sigma参数,而原始NMS算法时,直接取0或1。
2.soft-nms优缺点分析
优点:
1、Soft-NMS可以很方便地引入到object detection算法中,不需要重新训练原有的模型、代码容易实现,不增加计算量(计算量相比整个object detection算法可忽略)。并且很容易集成到目前所有使用NMS的目标检测算法。
2、soft-NMS在训练中采用传统的NMS方法,仅在推断代码中实现soft-NMS。作者应该做过对比试验,在训练过程中采用soft-NMS没有显著提高。
3、NMS是Soft-NMS特殊形式,当得分重置函数采用二值化函数时,Soft-NMS和NMS是相同的。soft-NMS算法是一种更加通用的非最大抑制算法。
缺点:
soft-NMS也是一种贪心算法,并不能保证找到全局最优的检测框分数重置。除了以上这两种分数重置函数,我们也可以考虑开发其他包含更多参数的分数重置函数,比如Gompertz函数等。但是它们在完成分数重置的过程中增加了额外的参数。
三.softer-nms
1.softer-nms算法思想
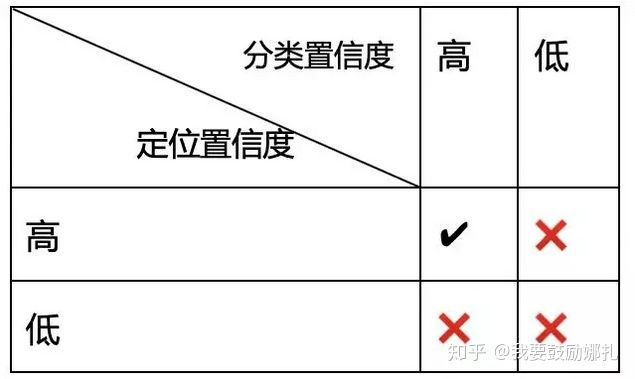
论文的motivation来自于NMS时用到的score仅仅是分类置信度得分,不能反映Bounding box的定位精准度,既分类置信度和定位置信非正相关的。NMS只能解决分类置信度和定位置信度都很高的,但是对其它三种类型:“分类置信度低-定位置信度低”,“分类置信度高-定位置信度低”,“分类置信度低-定位置信度高“都无法解决。
论文首先假设Bounding box的是高斯分布,ground truth bounding box是狄拉克delta分布(即标准方差为0的高斯分布极限)。KL 散度用来衡量两个概率分布的非对称性度量,KL散度越接近0代表两个概率分布越相似。
论文提出的KL loss,即为最小化Bounding box regression loss,既Bounding box的高斯分布和ground truth的狄拉克delta分布的KL散度。直观上解释,KL Loss使得Bounding box预测呈高斯分布,且与ground truth相近。而将包围框预测的标准差看作置信度。
论文提出的Softer-NMS,基于soft-NMS,对预测标注方差范围内的候选框加权平均,使得高定位置信度的bounding box具有较高的分类置信度。
2.网络结构

如所示Softer-NMS网络结构,与R-CNN不同的是引入absolute value layer(图中AbsVal),实现标注方差的预测。

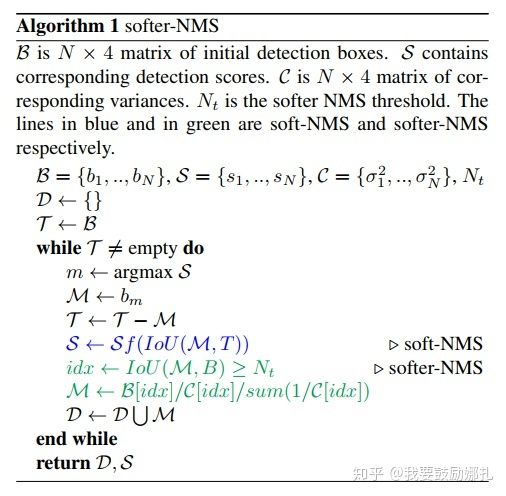
如上图 所示Softer-NMS的实现过程,其实很简单,预测的四个顶点坐标,分别对IoU>Nt的预测加权平均计算,得到新的4个坐标点。第i个box的x1计算公式如下(j表示所有IoU>Nt的box):

考虑特殊情况,可以认为是预测坐标点之间求平均值。
3.代码
softerNMS的开源代码在https://github.com/yihui-he/softerNMS。
在softer-NMS/detectron/core/test.py有Softer-NMS(配置cfg.STD_NMS), Soft-NMS(配置cfg.TEST.SOFT_NMS.ENABLED)以及NMS的实现

在softer-NMS/detectron/utils/py_cpu_nms.py文件有Softer-NMS的具体实现,加权求平均在47-48行代码实现:
4.优缺点分析
1、个人认为论文提出的KL loss就是曼哈顿距离,但是通过KL散度去证明,让数学不太好的同学不明觉厉。
2、论文提出的Softer-NMS,本质是对预测的检测框加权求平均,为什么要这样,以及为什么让box高度重叠?个人认为Softer-NMS的理论没有在应该什么的地方深入。