激光雷达应用原理
激光雷达可以高精度、高准确度地获取目标的距离、速度等信息或者实现目标成像。激光通过扫描器单元形成光束角度偏转,光束与目标作用形成反射/散射的回波。当接收端工作时,可产生原路返回的回波信号光子到达接收器,接收端通过光电探测器形成信号接收,经过信号处理得到目标的距离、速度等信息或实现三维成像。
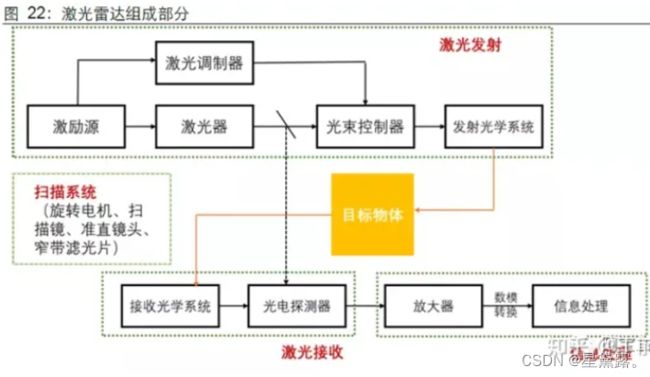
激光雷达主要包括激光发射部分、扫描系统、激光接受部分和信息处理部分,结构较为复杂。从激光雷达的工作来看:
主要分成四大部分:
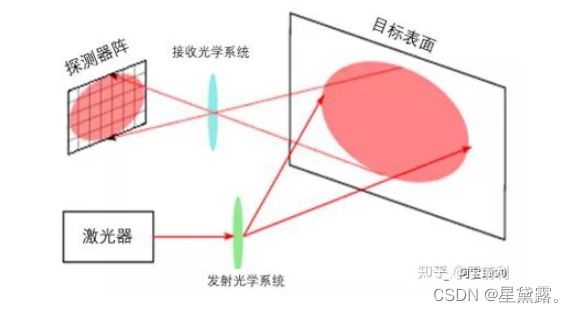
- 激光发射部分:激励源周期性地驱动激光器,发射激光脉冲,激光调制器通过光束控制器控制发射激光的方向和线数,最后通过发射光学系统,将激光发射至目标物体;
- 激光接收系统:经接收光学系统,光电探测器接受目标物体反射回来的激光,产生接收信号;
- 扫描系统,以稳定的转速旋转起来,实现对所在平面的扫描,并产生实时的平面图信息;
- 信息处理系统:接收信号经过放大处理和数模转换,经由信息处理模块计算,获取目标表面形态、物理属性等特性,最终建立物体模型。激光雷达本身结构的复杂性和核心部件的高价格决定激光雷达短期价格,尤其是机械式激光雷达价格短期较高。
主流激光雷达工作原理介绍
激光雷达部件较多,每个部件技术选择的不同就会造成效果和成本的不同,这也带来激光雷达技术路线的多元。激光雷达从测距方式、发射方式、光束操作方式、探测方式以及数据处理方式可以分为5 个核心技术,每个核心技术均有不同的技术分支,效果、成本、当前量产难度等均有不同,在5 个核心技术上不同的分支技术选取也导致了各家激光雷达技术路线的不同。
按照扫描方式分类的介绍:
按照扫描方式有无机械转动部件可以分为机械旋转、混合固态、纯固态。混合固态分为MEMS、转镜,纯固态分为相控阵OPA、Flash。

机械式激光雷达可实现360°扫描,应用于主流无人驾驶测试项目。机械式激光雷达机械旋转式激光雷达的优势在于可以对周围环境进行360°的水平视场扫描,而半固态式和固态式激光雷达往往最高只能做到120°的水平视场扫描,且在视场范围内测距能力的均匀性差于机械旋转式激光雷达。
机械旋转式激光雷达凭借兼具360°水平视场角和测距能力远的优势,目前主流无人驾驶测试项目纷纷采用了机械旋转式激光雷达作为主要的感知传感器。但是它们调试、装配工艺复杂,生产周期长,成本居高不下,并且机械部件寿命不长(约1000-3000小时),难以满足苛刻的车规级要求(至少1万小时以上)。
业界多为此种方案。发射系统和接收系统存在物理意义上的转动,不断的旋转发射器,将激光点变成线,并在竖直方向上排布多束激光发射器形成面,实现3D扫描的目标。但内部结构复杂,主要包括激光器、扫描器、光电探测器以及位置和导航器件。由于通过复杂的机械结构实现高频准确的转动,硬件成本高,且很难保持长时间稳定运行,业界寿命多为2~3万小时(正常使用约2~3年),因此目前固态激光雷达成为很多公司的研究方向。

优点是线束特别丰富(有64线、32线、16线、8线、4线不同的价格层次),性能高(可以实现360高速旋转),劣势是体积大、成本高、验证时间长。机械式激光雷达是目前Robotaxi的主流方案,Waymo自研的Honeycomb依然是传统机械式构造。海外市场以Velydone为主,国内玩家有禾赛、速腾。
混合固态激光雷达——转镜方案
工作原理:转镜式保持收发模块不动,让电机在带动转镜运动的过程中将光束反射至空间的一定范围,从而实现扫描探测,其技术创新方面与机械式激光雷达类似。
过车规和量产情况:转镜方案的激光雷达最早是法雷奥的Scala(与Ibeo联合开发),于2017年在奥迪A8上量产,也是首个车规级激光雷达。2020年10月,镭神CH32成为全球第二个获得车规认证的激光雷达。
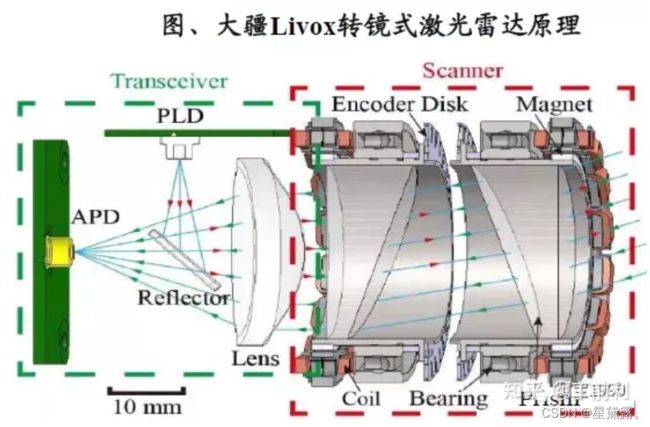
大疆Livox激光雷达也在2021年量产上市,采用非重复扫描方式,类似于视网膜中的中央凹,通过两个棱镜转速的调整,激光雷达获得不同的扫描图案,时间越长,点云密度越高,对场景的还原度越高。大疆的Livox 独创的双棱镜方案,使用在小鹏的P5的车上。
混合固态激光雷达——MEMS方案
MEMS激光雷达是采用微振镜结构进行激光束偏转。微振镜是MEMS激光雷达的核心组成部分,它需要具有平整的光学镜面,将机械式激光雷达的旋转部件微缩,增加集成度。
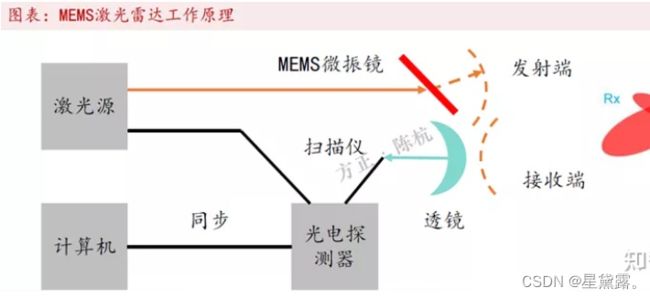
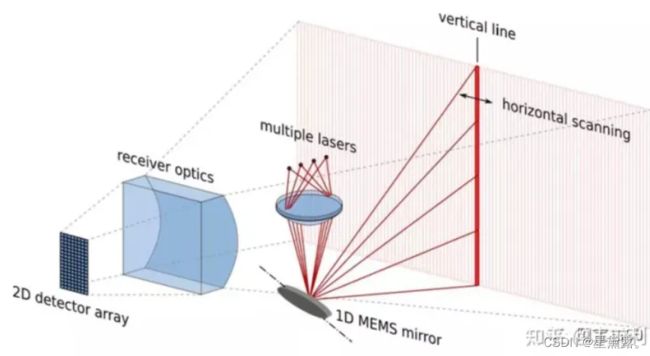
通过MEMS(微机电系统, Micro-Electro-Mechanical System)微振镜来代替传统的机械式旋转装置,由微振镜反射激光形成较广的扫射角度和较大的扫射范围。MEMS将机械微型化,扫描单元变成了MEMS 微镜。微棱镜的驱动方式以静电、电磁更为成熟、广泛。
微振镜技术门槛:
- 属于振动敏感性器件,而且MEMS材料的属性会随温度的变化而变化,x影响微小活动部件的运动特性,车规级较难;
- 激光雷达需要设计偏转角度更大的MEMS,同时要求镜面尺寸尽可能大,但这会降低良率,加大成本;
- MEMS代工资源较少:台积电安排产能少,只能找有MEMS的IDM厂或非主流代工厂。

MEMS(混合固态激光雷达) :MEMS激光雷达使用微振镜替代机械式产品中的宏观扫描仪, 将机械部件集成到单个芯片。根据MEMS咨询估算, 机械式雷达每组芯片成本约200美元, 仅16组芯片成本已高达3200美元, 因此MEMS方案可以大幅降低成本和体积。同时由微振镜反射激光形成较广的扫描角度和较大的扫描范围,可以形成更多的点云, 有效克服了机械式激光雷达在寿命和良品率方面的不足。
MEMS方案是目前激光雷达市场的最主流方案。代表公司为Luminar和Innoviz, 其中Luminar有Iria和Hydra两款产品亮相, Ira预计2022年量产, L 3+激光雷达售价约1000美元/个。Innoviz第一代产品InnovizOne最远探测距离250米, 已经获得宝马订单, 最新发布的InnovizTwo比InnovizOne成本下降70%。
Innoviz 新发布的InnovizTwo 体积减半,比初代产品比成本下降70%。
MEMS 半固态激光雷达供应链最为成熟,目前是量产产品的首选,当前阶段产品价格已经可以达到500 美金-1000 美金。MEMS 微振镜本质上是一种硅基半导体元器件,其特点是内部集成了“可动”的微型镜面,采用静电或电磁驱动方式。采用MEMS 微振镜简单讲就是以电机为主的扫描系统换成MEMS 驱动的镜片,实现激光雷达的扫描。
MEMS 作为较为成熟的半导体元件具备大规模生产后成本下降的特性。MEMS 激光雷达的优点在于:
- MEMS 微振镜的引入可以减少激光器和探测器数量,极大地降低成本;
- MEMS 激光雷达结构精巧,大幅下降尺寸;
- MEMS 微振镜并不是为激光雷达而诞生的器件,它已经在投影显示领域商用化应用多年,供应链较为成熟。
固态激光雷达——Flash方案
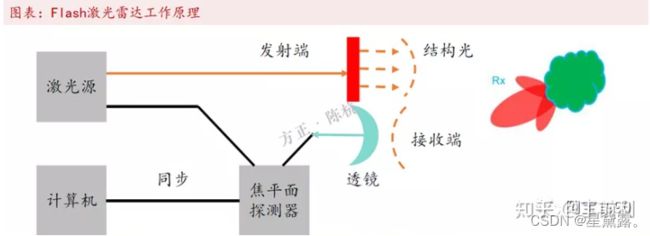
工作原理:短时间直接发射出一大片覆盖探测区域的激光,再以高度灵敏的接收器完成对环境周围图像的绘制,即快闪。
Flash 激光雷达采用类似照相机的工作模式,每个像素点可以记录光子飞行时间信息。发射的面阵激光照射到目标上,由于物体具有三维空间属性,从而不同部位的光所反射的光具有不同的飞行时间,被焦平面探测器阵列探测,根据飞行时间不同绘制图像。
Flash 激光雷达类似数字照片相机,用单次激光脉冲照亮目标环境,对抗震要求极高,同时发射高功率单次激光脉冲,需要对光源能量、发射方式进行创新,成本较高。Flash激光以LeddarTech为代表,但采用1064nm激光功率,并且没有采用昂贵的SPAD方案,因此功率和灵敏度受限。
Flash 激光雷达产品在消费电子领域产品成熟度较高,但在车载领域需要解决高能量发射的痛点,目前价格相对MEMS 较高,远期仍有潜力下探到500 美金以下。Flash 顾名思义,就是「闪光」,这种固态激光雷达像一个手电筒一样,发射一个面阵光,再通过高灵敏度的传感器绘制环境图像。FLASH 激光类3D Flash 技术的天然优势在于: 首先是全固态,没有任何移动部件,更像是一个半导体产品。
如此一来,在大批量生产从而降低成本、通过车规级方面,3D Flash 技术有天然的优势。Flash 激光雷达需要较高功率的脉冲才能实现较远距离的探测,主要解决方法是采用高功率的固态激光发射器,或采用InGasa 材质的SPAD 作为探测器,简单讲就是提升发射端功率或提高接收端的能力,目前这两种途径成本均较为昂贵。目前Flash 产品价格依然较高,Ouster 预计到2024 年将量产ES2 产品,价格为600美金,而且随着技术的优化,将有望下探到100美金以下。