NanoDet目标检测新网络!比YOLO跑的还快
NanoDet目标检测新网络!比YOLO跑的还快
项目链接:https://github.com/RangiLyu/nanodet
作者:RangiLyu

NanoDet
Super fast and lightweight anchor-free object detection model. Real-time on mobile devices.
- ⚡Super lightweight: Model file is only 1.8 mb.
- ⚡Super fast: 97fps(10.23ms) on mobile ARM CPU.
- Training friendly: Much lower GPU memory cost than other models. Batch-size=80 is available on GTX1060 6G.
- Easy to deploy: Provide C++ implementation and Android demo based on ncnn inference framework.
Benchmarks
| Model | Resolution | COCO mAP | Latency(ARM 4xCore) | FLOPS | Params | Model Size(ncnn bin) |
|---|---|---|---|---|---|---|
| NanoDet-m | 320*320 | 20.6 | 10.23ms | 0.72B | 0.95M | 1.8mb |
| NanoDet-m | 416*416 | 21.7 | 16.44ms | 1.2B | 0.95M | 1.8mb |
| YoloV3-Tiny | 416*416 | 16.6 | 37.6ms | 5.62B | 8.86M | 33.7mb |
| YoloV4-Tiny | 416*416 | 21.7 | 32.81ms | 6.96B | 6.06M | 23.0mb |
Note:
-
Performance is measured on Kirin 980(4xA76+4xA55) ARM CPU based on ncnn.
-
NanoDet mAP(0.5:0.95) is validated on COCO val2017 dataset with no testing time augmentation.
-
YOLO mAP refers from Scaled-YOLOv4: Scaling Cross Stage Partial Network
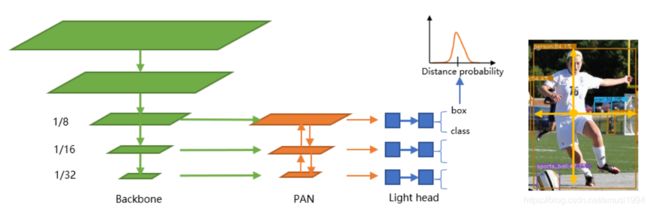
NanoDet is a FCOS-style one-stage anchor-free object detection model which using ATSS for target sampling and using Generalized Focal Loss for classification and box regression. Please refer to these papers for more detail.
Fcos: Fully convolutional one-stage object detection
ATSS:Bridging the Gap Between Anchor-based and Anchor-free Detection via Adaptive Training Sample Selection
Generalized Focal Loss: Learning Qualified and Distributed Bounding Boxes for Dense Object Detection
知乎中文介绍
Demo
Android demo
Android demo project is in demo_android_ncnn folder. Please refer to Android demo guide.
C++ demo
C++ demo based on ncnn is in demo_ncnn folder. Please refer to Cpp demo guide.
Python demo
First, install requirements and setup NanoDet following installation guide. Then download COCO pretrain weight from here.
- Inference images
python demo/demo.py image --config CONFIG_PATH --model MODEL_PATH --path IMAGE_PATH
- Inference video
python demo/demo.py video --config CONFIG_PATH --model MODEL_PATH --path VIDEO_PATH
- Inference webcam
python demo/demo.py webcam --config CONFIG_PATH --model MODEL_PATH --camid YOUR_CAMERA_ID
Install
Requirements
- Linux or MacOS (Windows not support distributed training)
- CUDA >= 10.0
- Python >= 3.6
- Pytorch >= 1.3
Step
- Create a conda virtual environment and then activate it.
conda create -n nanodet python=3.8 -y
conda activate nanodet
- Install pytorch
conda install pytorch torchvision cudatoolkit=11.0 -c pytorch
- Install requirements
pip install Cython termcolor numpy tensorboard pycocotools matplotlib pyaml opencv-python tqdm
- Setup NanoDet
git clone https://github.com/RangiLyu/nanodet.git
cd nanodet
python setup.py develop
How to Train
-
Prepare dataset
Convert your dataset annotations to MS COCO format(COCO annotation format details).
If your dataset annotations are pascal voc xml format, using this repo to convert data. voc2coco
-
Prepare config file
Copy and modify an example yml config file in config/ folder.
Change save_path to where you want to save model.
Change num_classes in model->arch->head.
Change image path and annotation path in both data->train data->val.
Set gpu, workers and batch size in device to fit your device.
Set total_epochs, lr and lr_schedule according to your dataset and batchsize.
If you want to modify network, data augmentation or other things, please refer to Config File Detail
-
Start training
For single GPU, run
python tools/train.py CONFIG_PATH
For multi-GPU, NanoDet using distributed training. (Notice: Windows not support distributed training before pytorch1.7) Please run
python -m torch.distributed.launch --nproc_per_node GPU_NUM --master_port 29501 tools/train.py CONFIG_PATH
How to Deploy
NanoDet provide C++ and Android demo based on ncnn library.
-
Convert model
To convert NanoDet pytorch model to ncnn, you can choose this way: pytorch->onnx->ncnn
To export onnx model, run tools/export.py. Then using onnx-simplifier to simplify onnx structure.
Run onnx2ncnn in ncnn tools to generate ncnn .param and .bin file
-
Run NanoDet model with C++
Please refer to demo_ncnn.
-
Run NanoDet on Android
Please refer to android_demo.
Thanks
https://github.com/Tencent/ncnn
https://github.com/open-mmlab/mmdetection
https://github.com/implus/GFocal
https://github.com/cmdbug/YOLOv5_NCNN
https://github.com/rbgirshick/yacs