ubuntu18.04安装pcl1.9.1
ubuntu18.04安装pcl1.9.1所需的cmake3.14.3和vtk8.2.0
先安装Qt5,X11,OpenGL
根据VTK的要求要先安装Qt5,X11,OpenGL
根据 官方文档 ,先更新qt5的依赖,python、Perl、Ruby
再进入 官网 下载Qt5:https://download.qt.io/archive/online_installers/3.2/
或者进入 清华源 下载镜像
我选择了5在线安装的最新版本
sudo chmod a+x 然后把安装包拖到这个a+x后面
直接把安装包拖到终端里
根据提示进行安装,安装完毕
2)安装x11
sudo apt-get install libx11-dev libxext-dev libxtst-dev libxrender-dev libxmu-dev libxmuu-dev
3)安装OpenGL
sudo apt-get install build-essential libgl1-mesa-dev libglu1-mesa-dev
4)安装libglut-dev
sudo apt-get install freeglut3-dev
5)安装metslib点云驱动包
下载地址:https://www.coin-or.org/download/source/metslib/metslib-0.5.3.tgz
tar xzvf metslib-0.5.3.tgz
cd metslib-0.5.3
./configure
make -j4
sudo make install
安装CMAKE
下载地址:https://cmake.org/download/
解压:
tar -zxvf cmake-3.16.0-rc2.tar.gz
1:安装pcl所需依赖
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann1.9 libflann-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install openjdk-8-jdk openjdk-8-jre
sudo apt-get install libvtk7.1-qt
sudo apt-get install libvtk7.1
sudo apt-get install libvtk7-qt-dev
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install openjdk-8-jdk openjdk-8-jre
linux安装eigen3
首先在终端执行命令:
sudo apt-get install libeigen3-dev
由于Eigen文件夹被默认安装到了路径:/usr/include/eigen3/Eigen,用#include
sudo cp -r /usr/include/eigen3/Eigen /usr/include
2:opengl报错
解决方案
在CMakeLists.txtS上添加以下代码
set(OpenGL_GL_PREFERENCE LEGACY)
3:Could NOT find PCAP (missing: PCAP_LIBRARIES PCAP_INCLUDE_DIRS)Could NOT find PCAP (missing: PCAP_LIBRARIES PCAP_INCLUDE_DIRS)在安装PCL时会有这样的错误:Could NOT find PCAP (missing: PCAP_LIBRARIES PCAP_INCLUDE_DIRS)
3.1下载pcap包,地址:http://www.tcpdump.org/#latest-release
tar -zxvf libpcap-1.9.0.tar.gz
cd libpcap-1.9.0
./configure
make -j8
sudo make install
3.2:如果在./configure时出现:
configure: error: Neither flex nor lex was found.
解决办法:
sudo apt-get install flex bison
4:下载libvtk7报错
解决办法
sudo apt-get install libvtk7-dev=7.1.1+dfsg1-2
还是报错
sudo apt-get install libvtk7-java=7.1.1+dfsg1-2
还是有的话
sudo apt-get install libvtk7-jni=7.1.1+dfsg1-2
这个报错需要多试几遍才能解决
5:下载VTK-8.2.0版本
地址:https://vtk.org/download/
安装依赖项
sudo apt-get install cmake-curses-gui
sudo apt-get install freeglut3-dev
下载下面适合的包

mkdir build
cd build
machine-gun
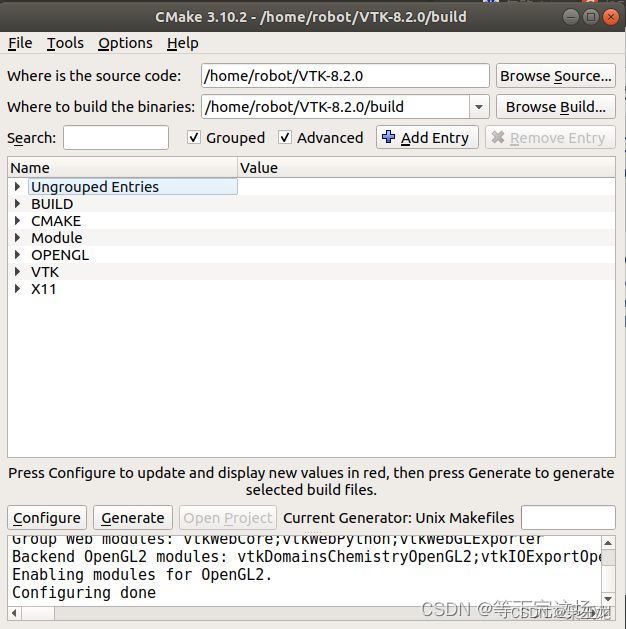
6:配置VTK
sudo make
sudo make install
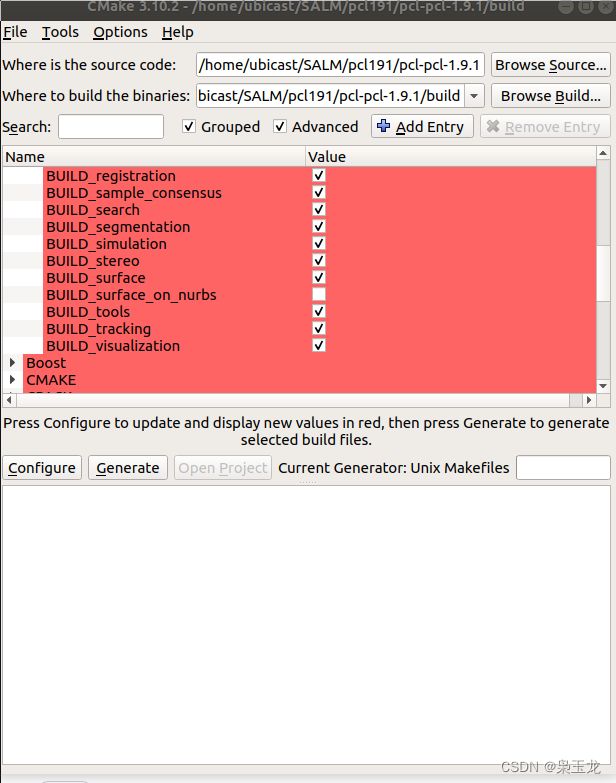
7:PLC1.9.1下载地址:https://github.com/PointCloudLibrary/pcl/releases/tag/pcl-1.9.1
展开Module和VTK,然后分别在里面配置勾选这两个:Module_vtkGUISupportQt、VTK_Group_Qt ,点击configure和generate,出错
cd pcl-pcl-1.9.1
mkdir build
cd build
如添加选择
8:进行编译
make -j8
报错/usr/local/include/eigen3/Eigen/src/Core/products/Parallelizer.h:162:40:错误:“eigen_assert_exception”不是“Eigen”的成员if (errorCount) EIGEN_THROW_X(Eigen::eigen_assert_exception());
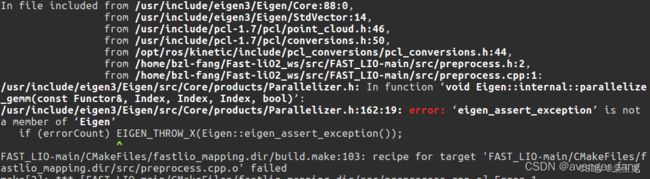
解决方案
在CMakeLists.txt上添加以下代码
include_directories("/usr/include/eigen3")
8.1:点云可视化工具
sudo make -j4 install
下载plc-tools
sudo apt-get install pcl-tools
9:验证
9.1: 在home目录下右击创建一个test_pcl文件夹,再创建一个源文件test_pcl.cpp
#include - 2:在test_pcl文件夹下再创建一个配置文件CMakeLists.txt
cmake_minimum_required(VERSION 2.6)
project(test_pcl)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(test_pcl test_pcl.cpp)
target_link_libraries (test_pcl ${PCL_LIBRARIES})
install(TARGETS test_pcl RUNTIME DESTINATION bin)
9.3:编译
在test_pcl文件夹下再建一个build文件夹,在build文件夹下打开终端。
输入 cmake …,然后输入 make进行编译。
mkdir build
cd build
cmake ..
make
./test_pcl