Unscented Kalman filter无迹卡尔曼滤波
扩展卡尔曼滤波(EKF)用一阶导数来对非线性模型做局部线性化,而无迹卡尔曼滤波UKF使用所谓“统计线性化”方法,从一个已知的分布中做采样,也就是“生成sigma points”,来“模拟”非线性模型的随机分布。UKF也包含经典的“预测”和“更新”过程,只不过多了一步sigma points的采样。
参考:
- SLAM笔记六——Unscented Kalman Filter
- unscented_kalman_filter.py代码
- Unscented Kalman Filter Tutorial
我们将通过参考链接中的python代码简介无迹卡尔曼滤波的计算过程。
计算Unscented Transform参数
Unscented Transform是无迹卡尔曼滤波的参数,指的是采样sigma points的已知分布的一些参数:

计算权重weights

这部分的代码为:
# UKF Parameter 无迹卡尔曼滤波参数设定值:
ALPHA = 0.001
BETA = 2
KAPPA = 0
def setup_ukf(nx):
lamb = ALPHA ** 2 * (nx + KAPPA) - nx
# calculate weights
wm = [lamb / (lamb + nx)]
wc = [(lamb / (lamb + nx)) + (1 - ALPHA ** 2 + BETA)]
for i in range(2 * nx):
wm.append(1.0 / (2 * (nx + lamb)))
wc.append(1.0 / (2 * (nx + lamb)))
gamma = math.sqrt(nx + lamb)
wm = np.array([wm])
wc = np.array([wc])
return wm, wc, gamma
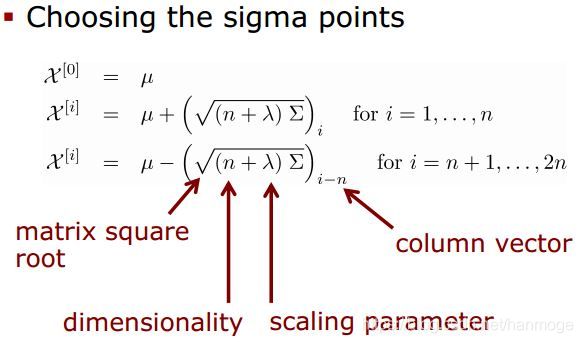
生成sigma points
这部分代码为:
def generate_sigma_points(xEst, PEst, gamma):
'''
sigma点的生成:
X_0 = 均值
X_i = 均值 + (sqrt((nx+lamb)协方差))_i, for i=1,2,...,n
X_i = 均值 - (sqrt((nx+lamb)协方差))_i-n, for i=n+1,n+2,...,2n
返回的sigma矩阵形式举例:
[[ 0. 0.002 0. 0. 0. -0.002 0. 0. 0. ]
[ 0. 0. 0.002 0. 0. 0. -0.002 0. 0. ]
[ 0. 0. 0. 0.002 0. 0. 0. -0.002 0. ]
[ 0. 0. 0. 0. 0.002 0. 0. 0. -0.002]]
'''
# X_0是均值
sigma = xEst
# 协方差矩阵的开平方:
Psqrt = scipy.linalg.sqrtm(PEst)
n = len(xEst[:, 0])
# Positive direction
for i in range(n):
sigma = np.hstack((sigma, xEst + gamma * Psqrt[:, i:i + 1]))
# Negative direction
for i in range(n):
sigma = np.hstack((sigma, xEst - gamma * Psqrt[:, i:i + 1]))
return sigma
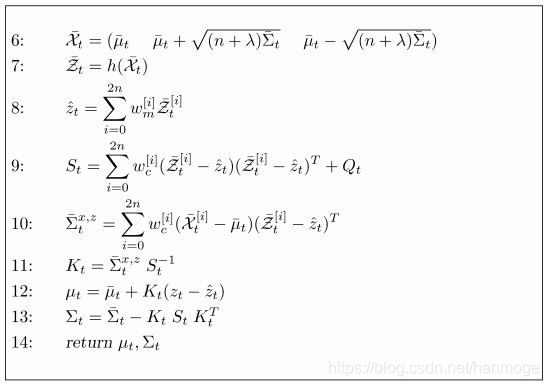
UKF过程
预测:

更新:
这一过程的代码在:
def ukf_estimation(xEst, PEst, z, u, wm, wc, gamma):
'''
z: 带噪声的观测
u: 带噪声的输入
wm, wc, gamma: 无迹变换参数
'''
# Predict 预测
# 生成sigma采样点:
sigma = generate_sigma_points(xEst, PEst, gamma)
# 运动模型预测:
sigma = predict_sigma_motion(sigma, u)
# 将采样点与权重相乘求对均值的估计:
xPred = (wm @ sigma.T).T
# 求协方差的估计:
PPred = calc_sigma_covariance(xPred, sigma, wc, Q)
# Update 更新
zPred = observation_model(xPred)
# 求残差:
y = z - zPred
# 对上一步计算过的均值的估计再次生成sigma采样点:
sigma = generate_sigma_points(xPred, PPred, gamma)
zb = (wm @ sigma.T).T
z_sigma = predict_sigma_observation(sigma)
st = calc_sigma_covariance(zb, z_sigma, wc, R)
Pxz = calc_pxz(sigma, xPred, z_sigma, zb, wc)
K = Pxz @ np.linalg.inv(st)
xEst = xPred + K @ y
PEst = PPred - K @ st @ K.T
return xEst, PEst
但需要注意的是,以上代码的“更新”部分与上面的6-14式不能完全一一对应,但因为在这个python实例中, h ( ) h() h()观测模型是简单的x、y位置输出,所以实际上和6-14式的计算是一样的。
为便于理解,我把这部分代码做了调整:
def ukf_estimation(xEst, PEst, z, u, wm, wc, gamma):
'''
z: 带噪声的观测
u: 带噪声的输入
wm, wc, gamma: 无迹变换参数
'''
# Predict 预测
# 生成sigma采样点: 2:
sigma = generate_sigma_points(xEst, PEst, gamma)
# 运动模型预测: 3:
sigma = predict_sigma_motion(sigma, u)
# 将采样点与权重相乘求对均值的估计: 4:
xPred = (wm @ sigma.T).T
# 求协方差的估计: 5:
PPred = calc_sigma_covariance(xPred, sigma, wc, Q)
# Update 更新
# 对上一步计算过的均值的估计再次生成sigma采样点: 6:
sigma = generate_sigma_points(xPred, PPred, gamma)
# 用生成的sigma采样点做观测预测: 7:
z_sigma = predict_sigma_observation(sigma)
# 求均值: 8:
zPred = (wm @ z_sigma.T).T
# 求卡尔曼增益计算中的S: 9:
st = calc_sigma_covariance(zPred, z_sigma, wc, R)
# 求xz间协方差: 10:
Pxz = calc_pxz(sigma, xPred, z_sigma, zPred, wc)
# 计算卡尔曼增益: 11:
K = Pxz @ np.linalg.inv(st)
y = z - zPred
# 更新均值: 12:
xEst = xPred + K @ y
# 更新协方差: 13:
PEst = PPred - K @ st @ K.T
return xEst, PEst
最后附上带有注释的、调整后的完整python代码:
"""
Unscented kalman filter (UKF) localization sample
author: Atsushi Sakai (@Atsushi_twi)
modification: Junchuan Zhang
"""
import math
import matplotlib.pyplot as plt
import numpy as np
import scipy.linalg
# Covariance for UKF 协方差矩阵
# 运动过程协方差:
Q = np.diag([
0.1, # variance of location on x-axis
0.1, # variance of location on y-axis
np.deg2rad(1.0), # variance of yaw angle
1.0 # variance of velocity
]) ** 2 # predict state covariance
# 观测协方差
R = np.diag([1.0, 1.0]) ** 2 # Observation x,y position covariance
# Simulation parameter 仿真噪声参数
INPUT_NOISE = np.diag([1.0, np.deg2rad(30.0)]) ** 2 # 输入噪声
GPS_NOISE = np.diag([0.5, 0.5]) ** 2 # GPS值噪声
DT = 0.1 # time tick [s]
SIM_TIME = 100 # simulation time [s]
# UKF Parameter 无迹卡尔曼滤波参数设定值:
ALPHA = 0.001
BETA = 2
KAPPA = 0
show_animation = True
def calc_input():
v = 1.0 # [m/s]
yawRate = 0.1 # [rad/s]
u = np.array([[v, yawRate]]).T
return u
def observation(xTrue, xd, u):
xTrue = motion_model(xTrue, u)
# add noise to gps x-y
z = observation_model(xTrue) + GPS_NOISE @ np.random.randn(2, 1)
# add noise to input
ud = u + INPUT_NOISE @ np.random.randn(2, 1)
xd = motion_model(xd, ud)
return xTrue, z, xd, ud
def motion_model(x, u):
F = np.array([[1.0, 0, 0, 0],
[0, 1.0, 0, 0],
[0, 0, 1.0, 0],
[0, 0, 0, 0]])
B = np.array([[DT * math.cos(x[2]), 0],
[DT * math.sin(x[2]), 0],
[0.0, DT],
[1.0, 0.0]])
x = F @ x + B @ u
return x
def observation_model(x):
H = np.array([
[1, 0, 0, 0],
[0, 1, 0, 0]
])
z = H @ x
return z
def generate_sigma_points(xEst, PEst, gamma):
'''
sigma点的生成:
X_0 = 均值
X_i = 均值 + (sqrt((nx+lamb)协方差))_i, for i=1,2,...,n
X_i = 均值 - (sqrt((nx+lamb)协方差))_i-n, for i=n+1,n+2,...,2n
返回的sigma矩阵形式举例:
[[ 0. 0.002 0. 0. 0. -0.002 0. 0. 0. ]
[ 0. 0. 0.002 0. 0. 0. -0.002 0. 0. ]
[ 0. 0. 0. 0.002 0. 0. 0. -0.002 0. ]
[ 0. 0. 0. 0. 0.002 0. 0. 0. -0.002]]
'''
# X_0是均值
sigma = xEst
# 协方差矩阵的开平方:
Psqrt = scipy.linalg.sqrtm(PEst)
n = len(xEst[:, 0])
# Positive direction
for i in range(n):
sigma = np.hstack((sigma, xEst + gamma * Psqrt[:, i:i + 1]))
# Negative direction
for i in range(n):
sigma = np.hstack((sigma, xEst - gamma * Psqrt[:, i:i + 1]))
return sigma
def predict_sigma_motion(sigma, u):
"""
Sigma Points prediction with motion model
"""
for i in range(sigma.shape[1]):
sigma[:, i:i + 1] = motion_model(sigma[:, i:i + 1], u)
return sigma
def predict_sigma_observation(sigma):
"""
Sigma Points prediction with observation model
"""
for i in range(sigma.shape[1]):
sigma[0:2, i] = observation_model(sigma[:, i])
sigma = sigma[0:2, :]
return sigma
def calc_sigma_covariance(x, sigma, wc, Pi):
nSigma = sigma.shape[1]
d = sigma - x[0:sigma.shape[0]]
P = Pi
for i in range(nSigma):
P = P + wc[0, i] * d[:, i:i + 1] @ d[:, i:i + 1].T
return P
def calc_pxz(sigma, x, z_sigma, zb, wc):
nSigma = sigma.shape[1]
dx = sigma - x
dz = z_sigma - zb[0:2]
P = np.zeros((dx.shape[0], dz.shape[0]))
for i in range(nSigma):
P = P + wc[0, i] * dx[:, i:i + 1] @ dz[:, i:i + 1].T
return P
def ukf_estimation(xEst, PEst, z, u, wm, wc, gamma):
'''
z: 带噪声的观测
u: 带噪声的输入
wm, wc, gamma: 无迹变换参数
'''
# Predict 预测
# 生成sigma采样点: 2:
sigma = generate_sigma_points(xEst, PEst, gamma)
# 运动模型预测: 3:
sigma = predict_sigma_motion(sigma, u)
# 将采样点与权重相乘求对均值的估计: 4:
xPred = (wm @ sigma.T).T
# 求协方差的估计: 5:
PPred = calc_sigma_covariance(xPred, sigma, wc, Q)
# Update 更新
# 对上一步计算过的均值的估计再次生成sigma采样点: 6:
sigma = generate_sigma_points(xPred, PPred, gamma)
# 用生成的sigma采样点做观测预测: 7:
z_sigma = predict_sigma_observation(sigma)
# 求均值: 8:
zPred = (wm @ z_sigma.T).T
# 求卡尔曼增益计算中的S: 9:
st = calc_sigma_covariance(zPred, z_sigma, wc, R)
# 求xz间协方差: 10:
Pxz = calc_pxz(sigma, xPred, z_sigma, zPred, wc)
# 计算卡尔曼增益: 11:
K = Pxz @ np.linalg.inv(st)
y = z - zPred
# 更新均值: 12:
xEst = xPred + K @ y
# 更新协方差: 13:
PEst = PPred - K @ st @ K.T
return xEst, PEst
def plot_covariance_ellipse(xEst, PEst): # pragma: no cover
Pxy = PEst[0:2, 0:2]
eigval, eigvec = np.linalg.eig(Pxy)
if eigval[0] >= eigval[1]:
bigind = 0
smallind = 1
else:
bigind = 1
smallind = 0
t = np.arange(0, 2 * math.pi + 0.1, 0.1)
a = math.sqrt(eigval[bigind])
b = math.sqrt(eigval[smallind])
x = [a * math.cos(it) for it in t]
y = [b * math.sin(it) for it in t]
angle = math.atan2(eigvec[bigind, 1], eigvec[bigind, 0])
rot = np.array([[math.cos(angle), math.sin(angle)],
[-math.sin(angle), math.cos(angle)]])
fx = rot @ np.array([x, y])
px = np.array(fx[0, :] + xEst[0, 0]).flatten()
py = np.array(fx[1, :] + xEst[1, 0]).flatten()
plt.plot(px, py, "--r")
def setup_ukf(nx):
lamb = ALPHA ** 2 * (nx + KAPPA) - nx
# calculate weights
wm = [lamb / (lamb + nx)]
wc = [(lamb / (lamb + nx)) + (1 - ALPHA ** 2 + BETA)]
for i in range(2 * nx):
wm.append(1.0 / (2 * (nx + lamb)))
wc.append(1.0 / (2 * (nx + lamb)))
gamma = math.sqrt(nx + lamb)
wm = np.array([wm])
wc = np.array([wc])
return wm, wc, gamma
def main():
print(__file__ + " start!!")
nx = 4 # State Vector [x y yaw v]'
xEst = np.zeros((nx, 1))
xTrue = np.zeros((nx, 1))
PEst = np.eye(nx)
xDR = np.zeros((nx, 1)) # Dead reckoning
# 初始化参数:
wm, wc, gamma = setup_ukf(nx)
# history
hxEst = xEst
hxTrue = xTrue
hxDR = xTrue
hz = np.zeros((2, 1))
time = 0.0
while SIM_TIME >= time:
time += DT
u = calc_input()
xTrue, z, xDR, ud = observation(xTrue, xDR, u)
xEst, PEst = ukf_estimation(xEst, PEst, z, ud, wm, wc, gamma)
# store data history
hxEst = np.hstack((hxEst, xEst))
hxDR = np.hstack((hxDR, xDR))
hxTrue = np.hstack((hxTrue, xTrue))
hz = np.hstack((hz, z))
if show_animation:
plt.cla()
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect('key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
plt.plot(hz[0, :], hz[1, :], ".g")
plt.plot(np.array(hxTrue[0, :]).flatten(),
np.array(hxTrue[1, :]).flatten(), "-b")
plt.plot(np.array(hxDR[0, :]).flatten(),
np.array(hxDR[1, :]).flatten(), "-k")
plt.plot(np.array(hxEst[0, :]).flatten(),
np.array(hxEst[1, :]).flatten(), "-r")
plot_covariance_ellipse(xEst, PEst)
plt.axis("equal")
plt.grid(True)
plt.pause(0.001)
if __name__ == '__main__':
main()