STM32时钟与定时器
目录
一、STM32的时钟系统
二、SysTick定时器
三、HAL_Delay的实现
四、通用定时器
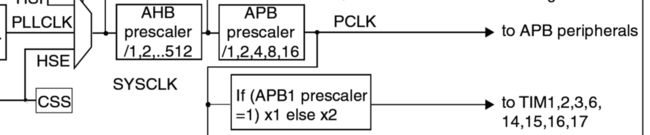
一、STM32的时钟系统
时钟系统是由振荡器(信号源)、定时唤醒器、分频器等组成的电路。常用的信号源有晶体振荡器和RC振荡器。
时钟是嵌入式系统的脉搏,处理器内核在时钟驱动下完成指令执行,状态变换等动作,外设部件在时钟的驱动下完成各种工作,比如串口数据的发送、A/D转换、定时器计数等等。因此时钟对于计算机系统是至关重要的,通常时钟系统出现问题也是致命的,比如振荡器不起振、振荡不稳、停振等。

振荡器是用来产生重复电子讯号的电子元件。其构成的电路叫振荡电路,能将直流电转换为具有一定频率交流信号输出的电子电路或装置。
振荡器主要分为RC,LC振荡器和晶体振荡器。RC振荡器是采用RC网络作为选频移相网络的振荡器。LC振荡器是采用LC振荡回路作为移相和选频网络的正反馈振荡器。晶体振荡器的振荡频率受石英晶体控制。
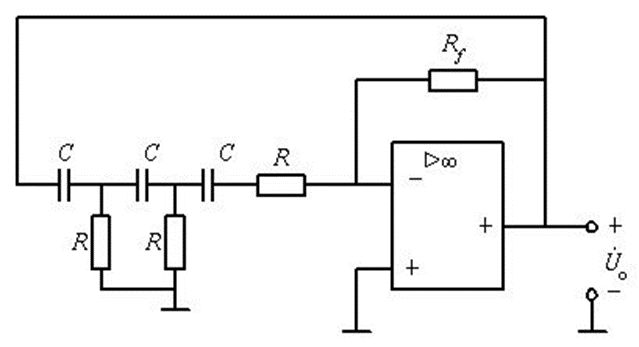
RC振荡器是又电阻电容构成的振荡电路,能将直流电转换为具有一定频率交流信号输出的电子电路或装置。
实现的成本比较低,毕竟就是一个电阻电容
晶体振荡器
石英晶体振荡器是高精度和高稳定度的振荡器,被广泛应用于彩电、计算机、遥控器等各类振荡电路中,以及通信系统中用于频率发生器、为数据处理设备产生时钟信号和为特定系统提供基准信号
是相对来说震荡频率一般都比较稳定,同时精度也较高
缺点
就是价格要稍微高点了,还有用晶体振荡器一般还需要接两个15-33pF起振电容

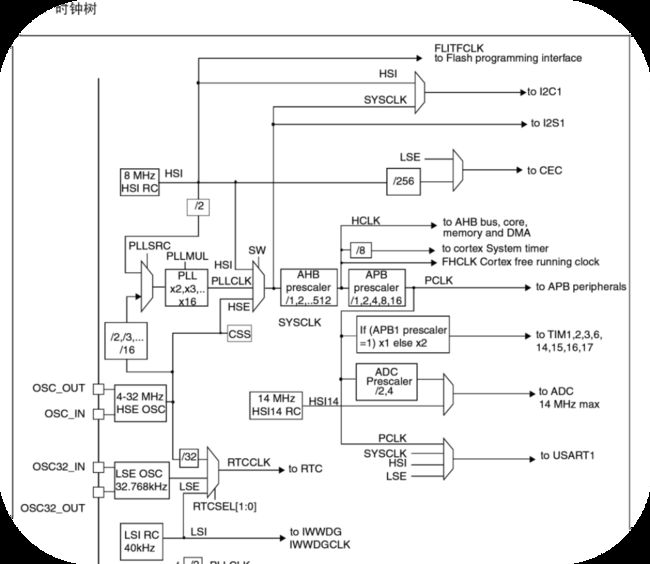
STM32 中有四个时钟源lHSI:高速内部时钟,RC振荡器,频率为8MHz;lHSE:高速外部时钟,可接石英/陶瓷谐振器,或者接外部时钟源,频率范围为4MHz~16MHzlLSI:低速内部时钟,RC振荡器,频率为40KHz。独立看门狗时钟源只能是这个,还可做RTC时钟源lLSE:低速外部时钟,接32.768KHz的石英晶体。这个主要是RTC的时钟源
有的教材会把PLL也写上,其实它只是一个倍频器。 它用的是别的时钟源进行倍频后输出
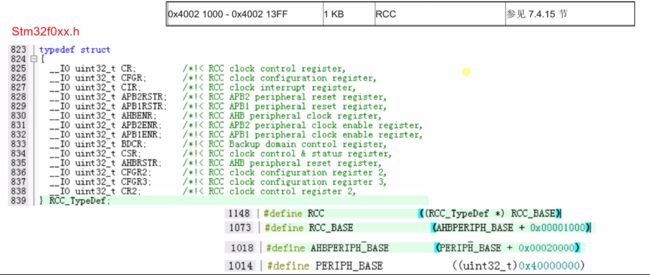
void SystemInit(void)System_stm32f0xx.c中定义,在系统启动之后,程序会先执行 HAL 库定义的 SystemInit 函数,进行系统一些初始化配置,复位 RCC 时钟配置为默认复位值(默认开启 HSI)
nvoid SystemClock_Config(void)在main.c中定义,实现时钟的具体配置,配置PLL, 配置AHB和HPB的时钟
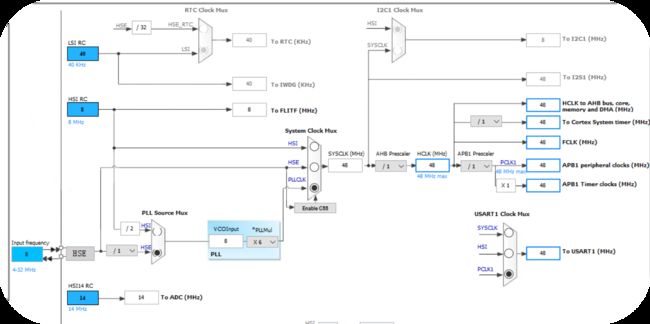
那么具体怎么用呢
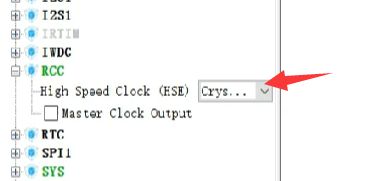
把这个配置成可用
接到外部时钟的两个管脚就可用了。
时钟树配置的外部晶振就亮了


选择倍频,切换时钟为PLCK这样所有的时钟频率就都变成48M了
不同的芯片他的频率限制不同这个不能大于48M,在超频状态下可能会损坏。
二、SysTick定时器
概念定时器,能够定时、计数的器件称为定时器
SysTick, 称作系统滴答定时器,简称滴答定时器。是一个定时设备,位于Cortex-M0内核中,可以对输入的时钟进行计数,当然,如果时钟信号是周期性的,计数也就是计时。
系统定时器一般用于操作系统,用于产生时基,维持操作系统的心跳。根据这个中断,系统就可以实现时间片的计算从而切换进程。
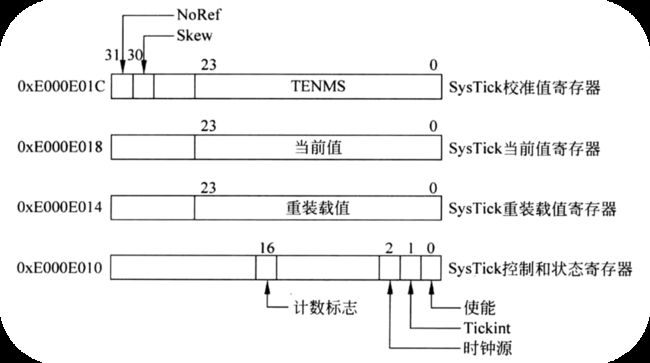
工作原理滴答定时器是一个24位定时器,也就是最多能计数2^24。在使用的时候,我们一般给计数器送一个初始的计数值,计数器向下计数,每来一个时钟信号,计数初值就减一,计数值减到0的时候,就会发出一次中断。然后重新从计数初值再减一计数,循环不断
当然,不止M0,所有的型号貌似都有,暂时么见过没有的。

n Main中已经实现对SysTick定时器的初始化void SystemClock_Config(void)
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
SysTick_Config(TicksNumb);
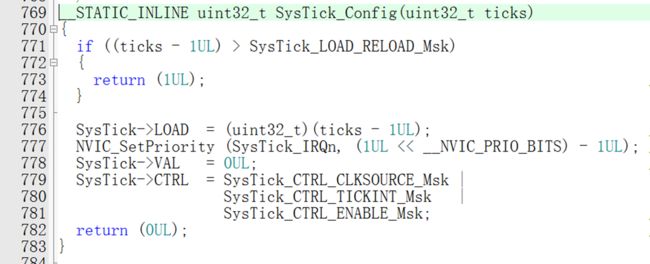
n 在core_cm0.h定义了SysTick_Config(uint32_t ticks)
三、HAL_Delay的实现
利用SysTick实现精准的延时
__weak void HAL_Delay(__IO uint32_t Delay)
{
uint32_t tickstart = 0U;
tickstart = HAL_GetTick();
while((HAL_GetTick() - tickstart) < Delay) ;
}
//下面代码均在文件 stm32f0xx_hal.c 中
static __IO uint32_t uwTick; //定义计数全局变量
//获取全局变量 uwTick 的值
__weak uint32_t HAL_GetTick(void)
{
return uwTick;
}
//全局变量 uwTick 递增
__weak void HAL_IncTick(void)
{
uwTick++;
}
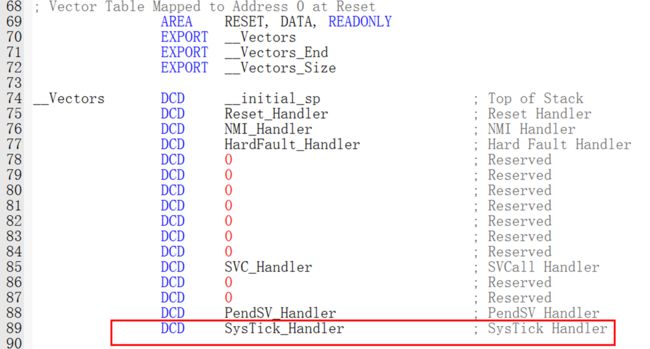
//Systick 中断服务函数:文件 stm32f0xx_it.c 中
void SysTick_Handler(void)
{
HAL_IncTick();
HAL_SYSTICK_IRQHandler();
}
每隔 1ms, uwTick增加 1
HAL库的延时函数有一个局限性,在中断服务函数中使用HAL_Delay会引起混乱,因为它是通过中断方式实现,而 Systick 的中断一般操作系统优先级是最低的,所以在中断中运行 HAL_Delay
会导致死锁的现象。
四、通用定时器
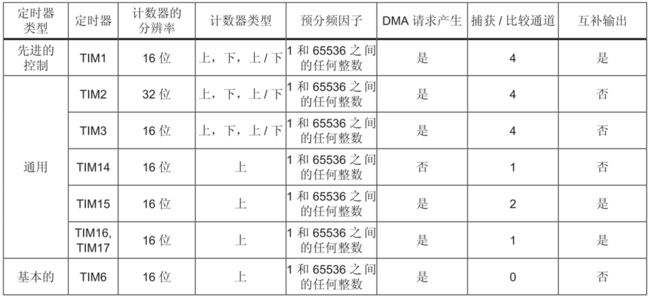
n 通用定时器TIMx功能
● 定时器定时计数
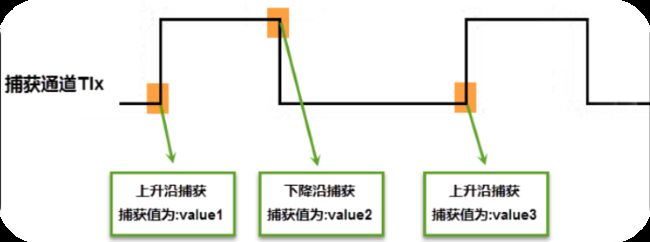
● 输入捕获
● 输出比较
● PWM输出
● 使用外部信号控制定时器和定时器互连的同步电路
n 高级定时器TIM1功能
● 通用定时器的有功能
● 带死区控制和紧急刹车,可用于PWM控制电机
n 基本定时器TIM1功能● 主要运用于定时计数以及驱动DAC
n向上计数模式计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。
n向下计数模式计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。
n中央对齐模式(向上/向下计数)计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。

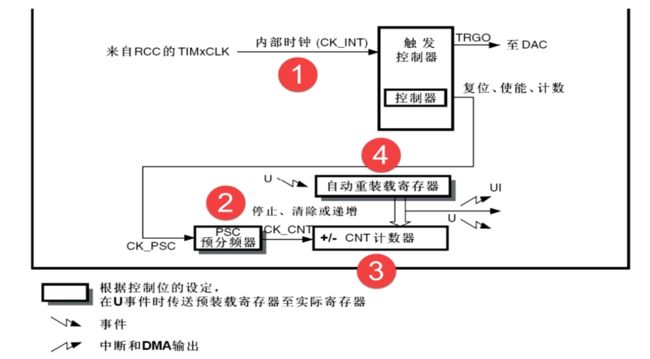
1/(TIMxCLK/(PSC+1)) * (ARR+1)
输入捕获可以用来捕获外部事件,比如引脚的电平变化(上升沿,下降沿),并记录下变化的时间,通常可以用来测量外部信号的频率或者电平持续的时间
此项功能是用来控制一个输出波形,当计数器与捕获/比较寄存器的内容相同时,输出比较功能做出相应动作,比如电平的翻转。通常用于生产PWM波形

void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
HAL_UART_Transmit(&huart1, "TIM2 INT\n", 9, 100);
}
}