<Linux开发> linux应用开发-之-uart通信开发例程
一、简介
串口全称叫做串行接口,串行接口指的是数据一个一个的按顺序传输,通信线路简单。使用两条线即可.
实现双向通信,一条用于发送,一条用于接收。串口通信距离远,但是速度相对会低,串口是一种很常用的工业接口。
关于串口的基础知识以及通行原理、通行数据格式等之类的问题。串口(UART)在嵌入式 Linux 系统中常作为系统的标准输入、输出设备,系统运行过程产生的打印信息通过串口输出;同理,串口也作为系统的标准输入设备,用户通过串口与 Linux 系统进行交互。
更加详细介绍说明读者可自行查阅相关资料。
二、环境搭建
本次测试uart通信的应用例程是运行在ubuntu pc上的;当然也是可以运行在linux开发板 或相关linux设备上的。
如果在Linux开发板上运行,需要有交叉编译工具。
本次测试实现的是自发自收,在PC上插入一个串口模块(uart转CH340模块,其它模块也可),然后将RX 引脚 与TX引脚 通过杜邦线连接即可。
三、例程代码
本次代码会使用单独的一个c文件用来编写uart代码,用以接收数据并在终端打印;
代码如下:
/***************************************************************
Copyright © OneFu Co., Ltd. 1998-2022. All rights reserved.
文件名 : uart.c
作者 : waterfxw
版本 : V1.0
描述 : uart 示例代码
其他 : 主要是测试 使用cmake
日志 : 初版 V1.0 2023/03/20 waterfxw创建
***************************************************************/
#define _GNU_SOURCE //在源文件开头定义_GNU_SOURCE 宏
#include 上述是uart收发源码。
在这次例程中我们使用cmake来编译,如果有不熟悉cmake的可自行查阅相关资料,或作者的另一篇文章:linux开发工具-之-CMake简单例程[初见]
在uart.c文件的同级目录下创建文件“CMakeLists.txt”
编写cmake,在“CMakeLists.txt”中编写一下内容:
project(UART)
add_executable(uart ./uart.c)
四、编译
首先:cmake编译:
cmake ./
运行cmake后,在同级目录下会得到一个Makefile文件
其次再进行Makefile编译,Makefile编译直接运行make即可
make

即可得到执行文件uart
五、运行验证
查看文件类型
file uart
![]()
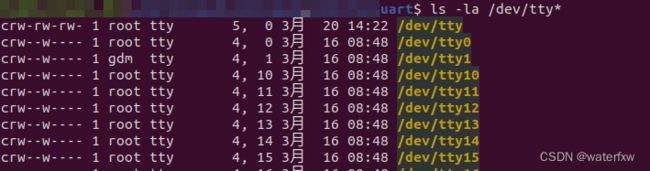
作者想串口模块插入ubuntu PC后得到的设备是 “/dev/ttyUSB0”
可通过“ls -a /dev/tty*” 命令查看,如下:

运行可执行程序uart;
查看uart的帮助信息:
./uart --help
查看帮助如下:

进行读写运行测试命令:
sudo ./uart --dev=/dev/ttyUSB0 --type=readwrite
效果如下图:

至此,uart的读写测试完成。
此例程只是简单实现读写,在实际运用中会比这复杂很多。
cmake相关文章,作者后续会持续更新,尽请关注。