houdini hdk中的hello world—创建点操作
入门学习所以不是很在意程序的完整性和健康程度以及有没有潜在的bug。我只是实验一些基础命令的使用方法。看机器猫前辈2012年就已经发表的hdk相关的文章作为后辈只能仰望。前辈们已经成长到了一个我们无法想象的高度。我从不求追赶上前辈们。只求再学习的过程中获得的充实。谢谢前辈们为我们留下的宝贵经验。
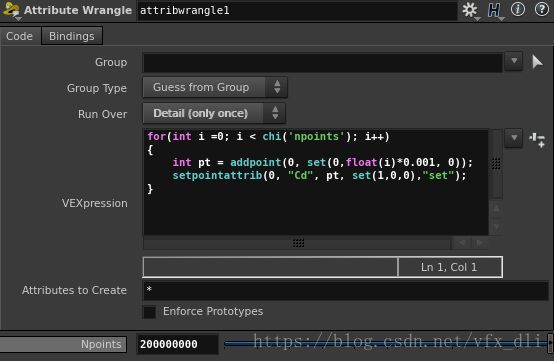
测试了一下用hdk创建点的基本操作。然后用VEX实现相同功能做了速度的对比,我不太清楚C++的for的原理是否会用很多线程去算。但是VEX是支持多线程的。但是我把vex的for写再得detail级别运行只能用单线程去算所以限制了vex的速度。。
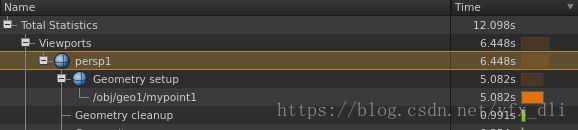
hdk创建2亿点用时6.448秒

VEX创建2亿点用时一分钟还要多一点

SOP_Mypoint.h
#include SOP_Mypoint.cpp
#include "SOP_Mypoint.h"
#include