FreeRTOS简要学习理解
需要对FreeRTOS等操作系统深入学习的朋友可以报下韦东山老师的系统训练营,很充实的课程内容,并且老师很负责。
1.主要内容与学习目的
1.1 内容
- 栈作用演示
- 创建任务的2个核心:栈、任务结构体
- 任务调度机制
- 基于链表理解调度机制
- 队列的使用
- 基于链表理解队列
1.2 学习目的
中度掌握——知道内部机制
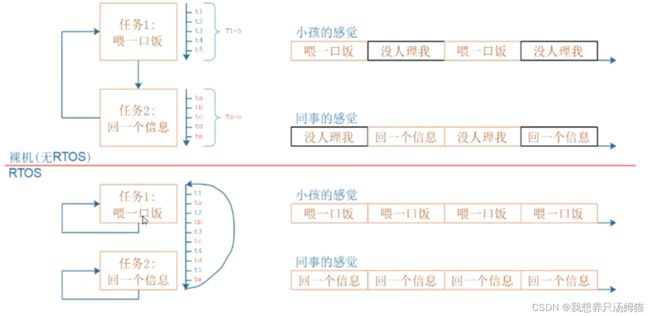
1.3 RTOS与裸机程序的区别
核心在于:任务的交替执行
1.4 后续例程所使用文件
备用:并无高端技巧,该文件在STM32F103上搭建好环境方便测试而已。
下载链接
2.概念理解
任务: 本质就是一个运行起来的函数,包含信息有:一段保存在flash上的代码(无法更改)、任务运行的位置、任务运行的环境(各种局部变量)。
函数引申出下列的问题,任务切换时会暂停任务,那么如何暂停任务并且恢复任务
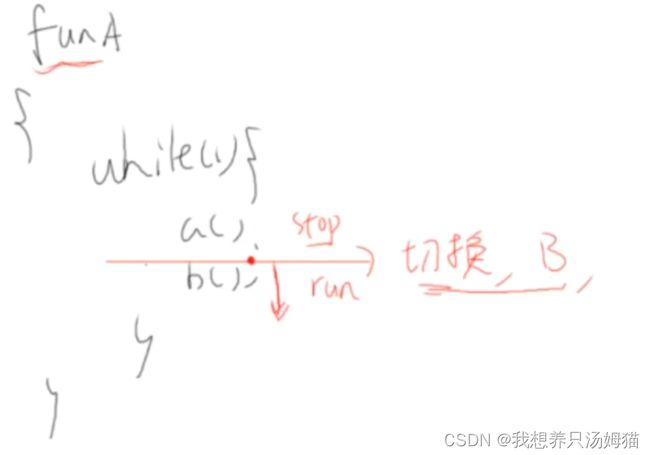 怎么暂停/恢复任务,需要保存哪些东西:任务执行的位置,变量的值不能被破坏以及其他一些需要注意的事项。
怎么暂停/恢复任务,需要保存哪些东西:任务执行的位置,变量的值不能被破坏以及其他一些需要注意的事项。
2.1 函数运行环境理解示例
通过add_val函数理解函数运行过程中如果被打断,需要保存哪些东西,理解函数运行的本质。并且理解需要哪些东西才可以让这个函数恢复运行。
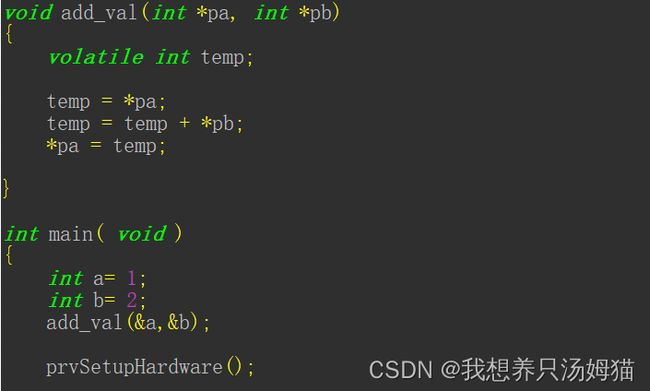 通过Keil工具查看add_val函数的反汇编代码,进行分析
通过Keil工具查看add_val函数的反汇编代码,进行分析
2.1.1 ARM架构基础知识补充(以F103为例)
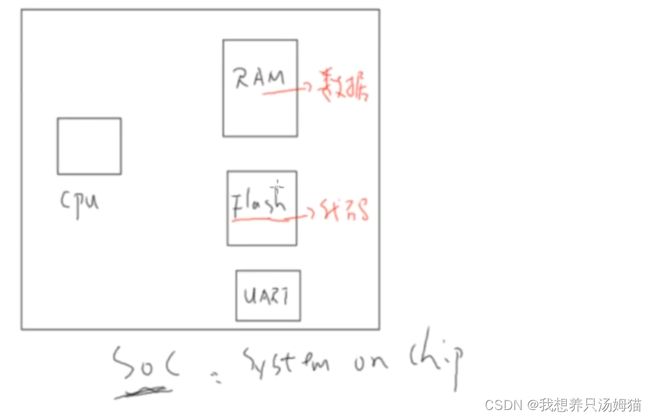
- CPU与内存的关系,计算a+b的过程
读a、读b、计算a+b、写入a+b

CPU从内存中将数据读到哪里?CPU内部有多个寄存器,读入的数据保存在CPU内部寄存器中
CPU如何读取数据?需要知道源、目的、长度
CPU怎么知道执行这样的一个操作来对数据进行执行?CPU读Flash得到指令,执行读取内存的指令
CPU如何知道要将读取的数据放到哪一个CPU内部寄存器呢?CPU不知道,它所有操作都是从程序中读取出来的,程序告诉它保存在哪,这些指令叫做机器码
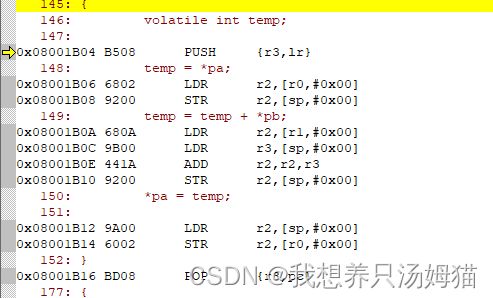
2.1.2 汇编代码讲解
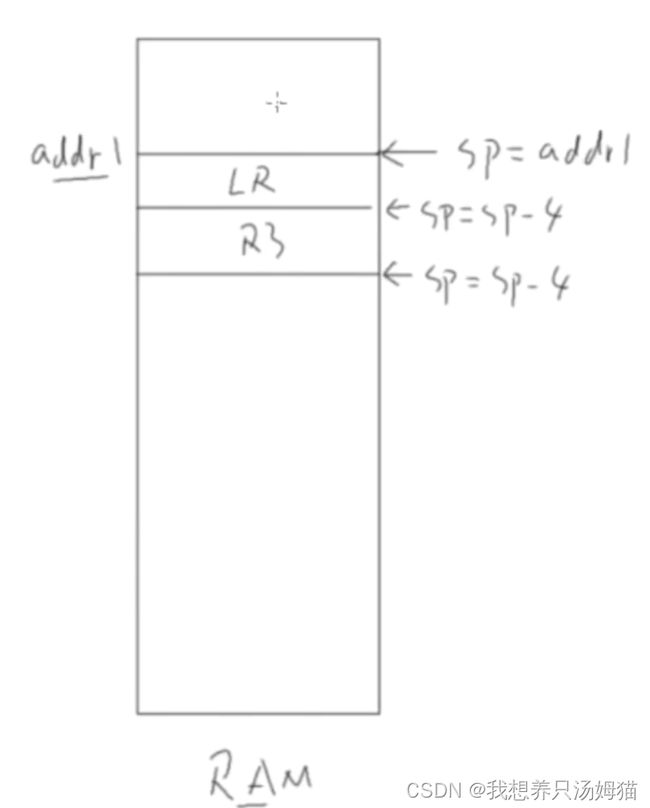
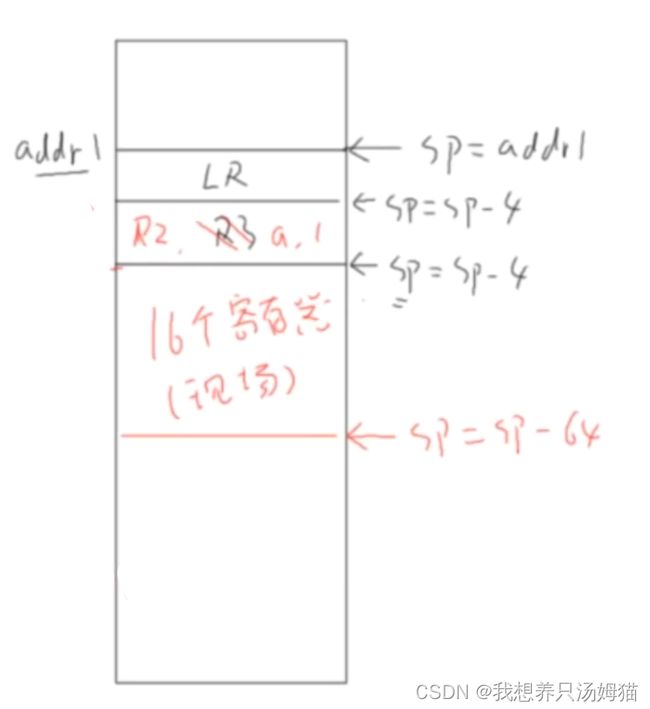
函数开始,假设刚开始sp=addr1
- PUSH {r3, lr}
PUSH指令本质是一条写内存指令,将R3和Lr寄存器的值放入栈中。
lr等于当前程序的返回地址,也就是下一条指令prvsetupHardware()函数的地址。
栈的地址由sp指针决定,高标号的寄存器放在高地址,低标号寄存器在低地址,即括号里面的内容没有序号的排放也可以。
假设sp(R13)为addr1,那么效果图如下
temp = *pa
- LDR r2,[r0,#0x00]
在调用C函数的时候,有约定少于四个参数的函数的形参,第一个参数保存在r0,第二个参数保存在r1,第三个参数保存在r2,第四个参数保存在r3。
因此,这里的R0=&a=a的地址,这条指令的意义在于去a的地址读取数据,保存在R2里面,R2寄存器的值目前是&a的值偏移地址0位所在地址读取到的值。R2 = a. - STR r2,[sp,#0x00]
将R2,放到sp+0所在的地址上,这会[sp+ 0x00]地址的值充当一个Temp临时变量
temp = [sp + 0x00] = a
temp=temp+*pb
- LDR r2,[r1,#0x00]
R2 = [R1+0x00] = [&b] = b
- LDR r3,[sp,#0x00]
R3 =[sp + 0x00] = temp = a
- ADD r2,r2,r3;
R2 = R2 + R3 = b + temp
- STR r2,[sp,#0x00]
[sp + 0x00] = R2 = b + temp
即,temp = temp + *pb
*pa=temp
- LDR r2,[sp,#0x00]
将[sp+ 0x00]地址的值读取到R2
即:R2 = [sp +0x00] = temp - STR r2,[r0,#0x00]
将R2的值存放到[sp + 0x00]的地址
即[sp + 0x00 ] = R2 = temp,此时[sp+0x00]地址所存放的值是运算的结果 - POP {r3, pc}
POP本质是一条读内存的指令,这里从内存中读取出数据赋值给R3和pc。
低地址取值出来放入低标号的寄存器中,高地址取值出来放入高标号的寄存器中;
对于上文中提到的入栈情况,效果如图:
lr寄存器中保存着原来程序的返回地址,现在将原来程序的返回地址放入pc寄存器中吗,使得其成为当前要执行指令的地址。
先将此时sp栈指针指向地址(低地址)的值(运算结果)取出放入R3寄存器(低标号)中,然后sp指针-4;
再将此时sp栈指针指向的地址(高地址)的值取出放入pc寄存器(高标号)中,然后sp指针-4;
这会pc指针指向即将执行的下一条指令的地址,即函数执行完毕,准备返回主程序继续执行。
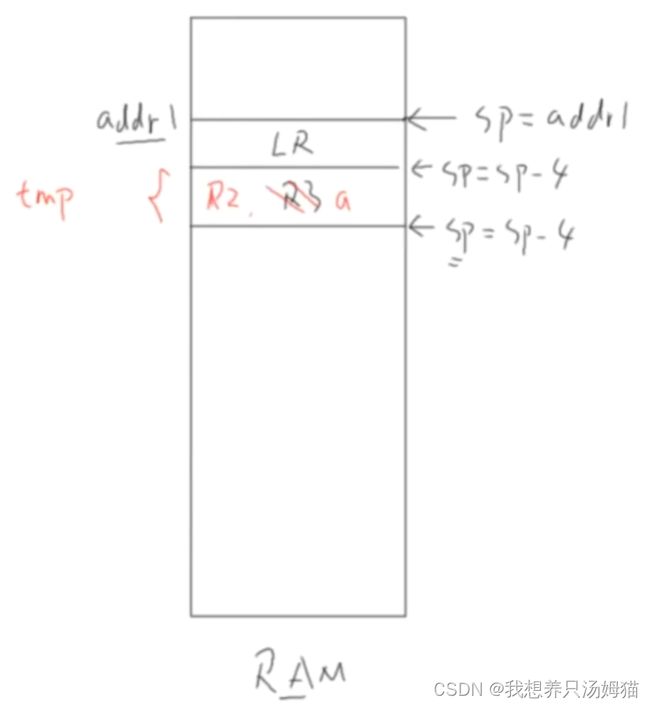
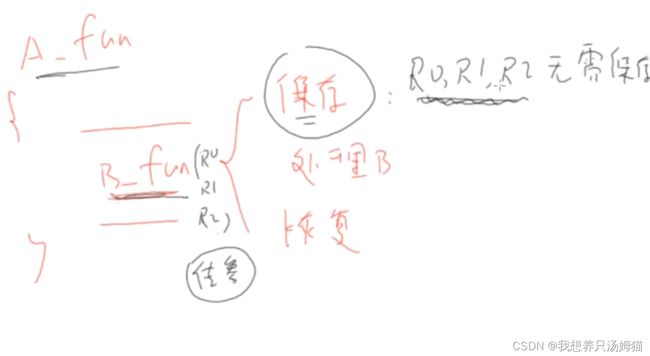
2.1.3 中断假设与现场保存
假设在下图中的位置突然发生中断,如何保存现场?
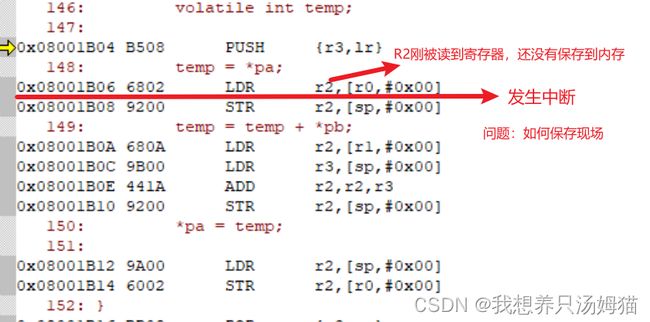
为了使得返回现场时,能继续工作,在我们假设的这个场景里面需要在跳转去中断的时候提前保存R2的值,不然在跳转执行的程序中可能会修改R2的值。而在其他的场景中,则需要保存不同的值。
**现场:**被打断的瞬间,所有CPU内部的寄存器的值;
**怎么保存现场:**保存在内存中;
**现场保存在内存哪里:**保存在栈里,把16个寄存器保存在栈里,如下图;
2.1.4 保存现场的几种场景


2.1.5 总结
一个任务,其中必定包含一个函数,这个函数可能还会调用多个其他的函数,记录当前程序执行的状态也称之为保存现场。
可以简单的认为:一个任务就是由函数和它的栈组成,也称为运行中的函数。
对于一个任务,它的局部变量保存在它的栈中,它运行过程中所使用的寄存器也保存在栈里面,调用关系也保存在栈里面,如何表示这个任务,如何找到被保存的栈,所以得有一个任务结构体。
3. 创建任务函数粗略讲解
3.1 TCB猜测
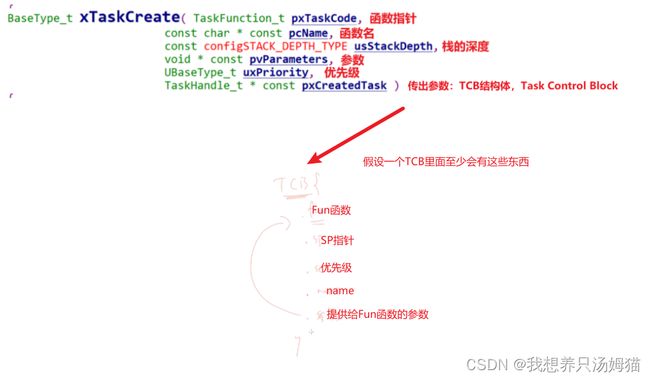
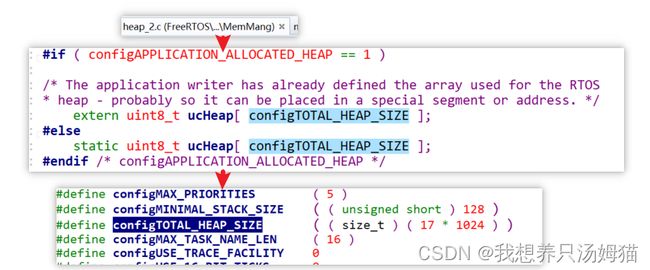
3.2 查看函数对于TCB的疑问
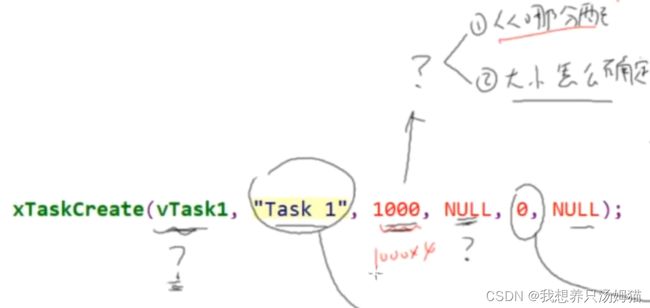
注意传参这里栈的大小这里写的1000指1000*4字节的栈大小,然后从FreeRTOS的数组中划分出来使用。
针对创建任务函数,需要在内存中使用TCB来保存,查看精简后TCB结构体(删除配置项)

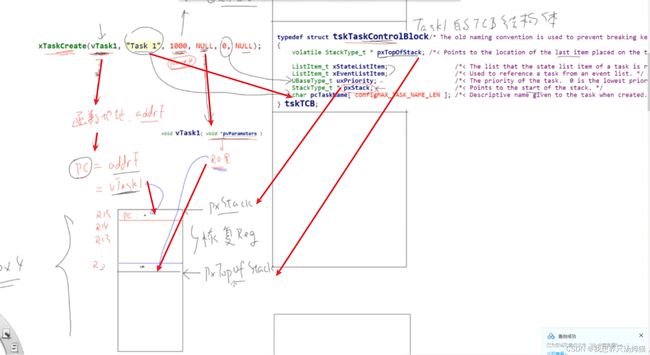
3.3 TCB结构体参数理解
该语句创建了1000*4字节大小的栈
xTaskCreate(vTask1, "Task 1", 1000, NULL, 0, NULL);
假设刚创建的这个任务处于暂停的状态,想要其恢复现场,再次运行,就需要从栈里面恢复寄存器。
下图中pxStack的位置不对,位于于栈开始的低地址,在该图中形象表示在内存的最下方;在创建任务函数中,它等于malloc后的值。
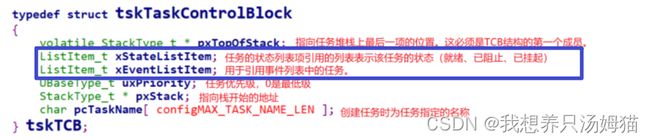
3.4 TCB结构体中的链表参数
TCB结构体中有两个链表
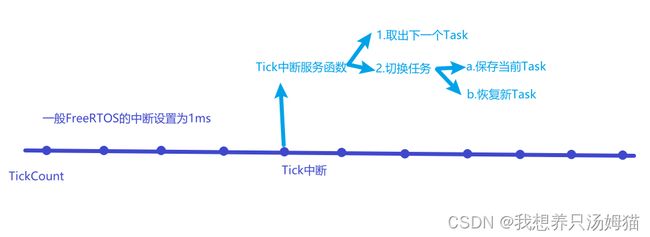
4.调度机制
4.1任务的管理
4.1.1怎么取出要运行的任务?
- 对于阻塞和暂停状态的任务先不用管,这里只用取出就绪和运行状态的任务,取出高优先级的任务,运行即可
- 如果任务优先级相同,则根据链表轮流执行,前面的先运行,运行一个Tick后,到链表尾部排队
- 函数实现
在xTaskCreate函数中有这样的一行代码,将TCB放入就绪链表中
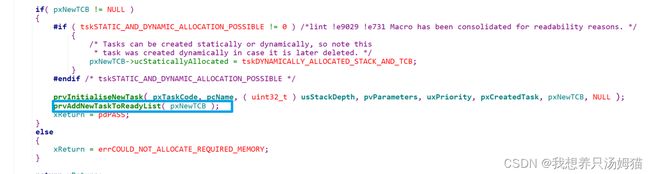
在tasks.c任务中跟踪查看TCB插入链表的函数
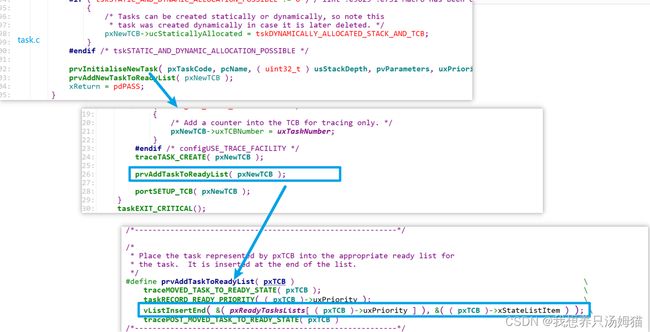
这里将就绪的TCB放入一个就绪链表的数组,这个数组大小为5,分别用于放入不同优先级的任务。此外还有阻塞链表和暂停链表。
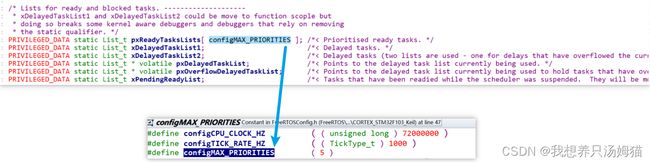
回顾本文开头内容,依次创建三个任务123,任务1和2 的优先级为0,3的优先级为2,三个任务分别放入如下的链表。

调度就只负责就绪链表,从上往下按照优先级高低对任务执行,执行完毕后讲任务放到链表尾部。
注意事项:在就绪链表中,还有一个空闲函数。
4.1.2 就绪链表谁来调度?

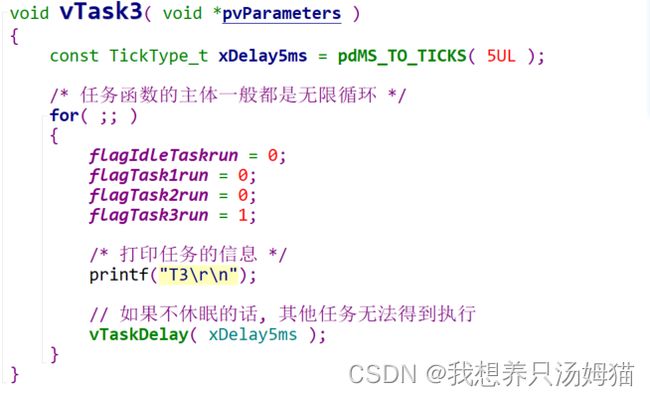
4.1.3 状态切换的过程
以任务3为例,这里调用vTaskDelay函数延时了5ms,此时调度器就会将任务3从pxReadyTasksList链表中移动到pxDelayTaskList链表中,所以只有就绪链表中的任务会消耗CPU资源,其他链表中的任务并不消耗CPU资源;

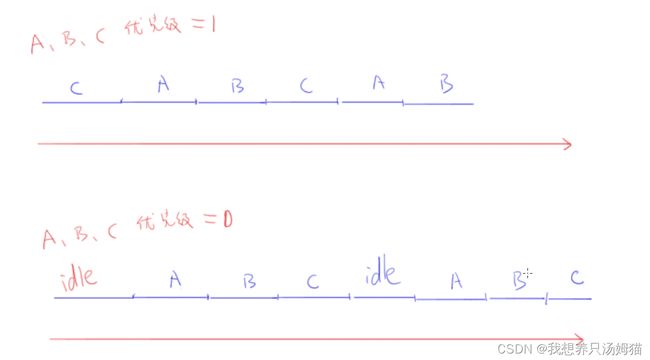
4.2 同优先级任务执行顺序(注意)
空闲任务的优先级为0,并且就绪链表中优先级为0的链表中有其他任务时,空闲任务先执行,然后判断得出发生礼让,进行调度,然后重新运行。

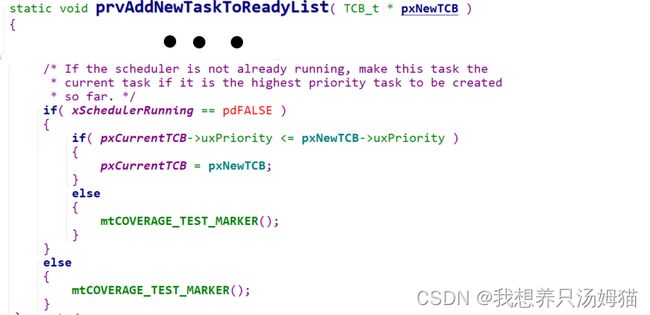
4.2.1 在相同优先级的时候,第一次执行时后创建的任务先执行
在创建任务函数添加就绪链表的函数中,有这样一个判断,如果当前新添加的TCB优先级等于当前的TCB,那么当前的TCB就等于新添加的TCB,即当前运行的任务就是最后添加的任务。
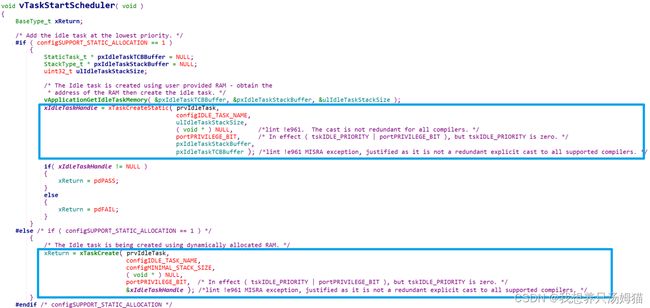
4.3空闲任务——启动调度器vTaskStartScheduler()
在程序执行启动调度器函数vTaskStartScheduler时,在函数中,会根据用户静态创建任务与动态创建任务的区别,创建一个空闲任务Idle任务,这个任务的优先级为0,放入就绪链表0。
**空闲任务的作用:**通常完成一些清理工作,如果其他任务自杀,那么空闲任务就需要去释放其他任务的栈,避免内存溢出。
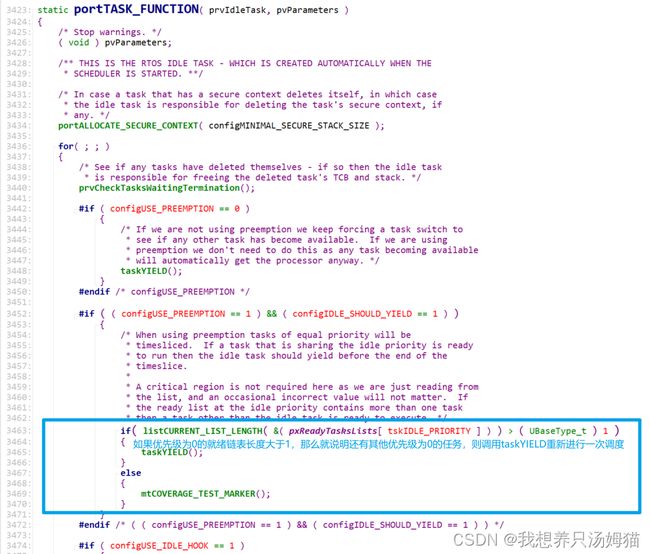
5.空闲任务礼让
如果有同是优先级0的其他就绪任务,空闲任务主动放弃一次运行机会,下一次再正常运行,因此在优先级都为0的时候,空闲任务只执行了一小会,判断得出需要礼让,就调用taskYIELD函数进行重新调度。
6. 问题汇总
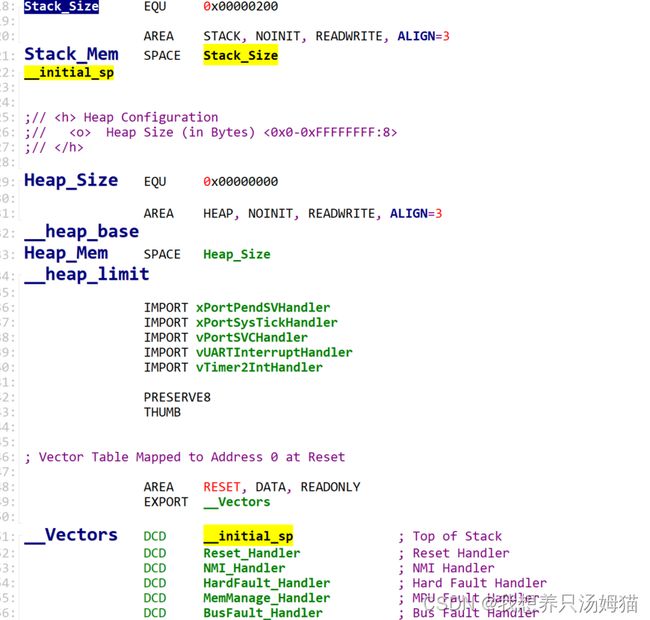
6.1 汇编文件的栈和任务的栈有什么区别
- 首先去STM32F103x.s看看汇编文件的栈,在向量表的开头指定了一个栈,在文件开头指定了一个16进制的200字节空间,空间的高地址放入了__initial_sp,在STM32启动的时候,他会将__initial_sp的数值放入sp寄存器,STM32有两个sp寄存器(main_sp/process_sp),这里放入main_sp.
 单片机上电复位的时候会执行Reset_Handler函数,函数会跳转到__main函数,然后跳转到main函数,main函数所用到的栈是汇编中设置的msp,也给中断函数使用
单片机上电复位的时候会执行Reset_Handler函数,函数会跳转到__main函数,然后跳转到main函数,main函数所用到的栈是汇编中设置的msp,也给中断函数使用
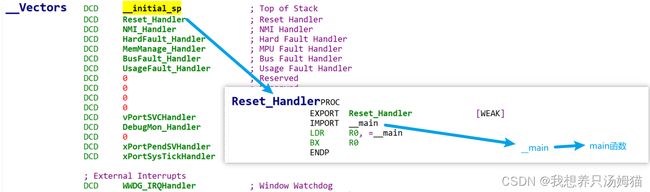
- 任务的栈是任务自己的,和main函数不一样。
6.2 任务会在Tick中断前放弃运行的情况

