Eigen——C++矩阵运算库
Eigen——C++矩阵运算库
-
-
-
- 1.Eigen是什么?
- 2.下载配置
- 3.使用
-
- 3.1 模块和头文件
- 3.2 每个具体使用,下面有相对官网的中文博客
- 3.3 下面只记录我要用的,一边用一边记
-
-
1.Eigen是什么?
Eigen是一个基于C++模板的开源库,支持线性代数,矩阵和矢量运算,数值分析及其相关的算法。
2.下载配置
-
官网:Eigen官网,下载解压缩可以重命名为eigen3。官网介绍使用Eigen,只需要下载它的源码,事实上,Eigen子目录中的头文件是使用Eigen编译程序所需的惟一文件。所有平台的头文件都是相同的。不需要使用CMake或安装任何东西。

-
写一个简单的项目,包含头文件。注:Eigen使用源代码方式提供用户使用,在使用时只需要包含Eigen头文件即可使用。
#include#include using Eigen::MatrixXd; int main() { MatrixXd m(2,2); //MatrixXd类型,代表一个任意大小的矩阵 m(0,0) = 3; m(1,0) = 2.5; m(0,1) = -1; m(1,1) = m(1,0) + m(0,1); std::cout << m << std::endl; } -
在项目——属性——C/C++——常规——附加包含目录添加该库位置就好了,这个操作是指包含头文件,没有链接到的库。在编译上述程序时,只需要一个操作,即让编译器能够找到Eigen的头文件。放置Eigen源代码的目录必须位于包含路径中。
官网安装和配置说明(包含使用的简单介绍):Getting started
图文详细:vs2013配置Eigen库
3.使用
官网的快速参考指南:Quick reference guide
3.1 模块和头文件
Eigen库被分为一个核心模块和几个别的模块,每个模块有一个对应的头文件,使用该模块需要包含对应头文件。还提供了Dense和Eigen头文件方便同时使用多个模块。
| 模型 | 头文件 | 说明 |
|---|---|---|
| Core | #include |
包含Matrix和Array类,基础的线性代数运算和数组操作。 |
| Geometry | #include |
包括平移、缩放、2D\3D旋转变换、四元数、轴旋转变换 |
| LU | #include |
包含求逆,行列式,LU分解 |
| Cholesky | #include |
包含LLT和LDLT Cholesky分解 |
| Householder | #include |
householder变换,此模块由几个线性代数模块使用 |
| SVD | #include |
奇异值分解 |
| QR | #include |
QR分解 |
| Eigenvalues | #include |
特征值、特征向量 |
| Sparse | #include |
稀疏矩阵存储及相关的基本线性代数 |
| * | #include |
包含Dense和Sparse头文件(Eigen全部库) |
3.2 每个具体使用,下面有相对官网的中文博客
Eigen库使用指南
Eigen: C++开源矩阵计算工具——Eigen的简单用法
Eigen矩阵库使用说明
*** Eigen和Matlab对应说明
3.3 下面只记录我要用的,一边用一边记
1、Matrix(矩阵) 和 Array(数组)类 :分别表示数学矩阵和向量
所有的矩阵和向量都是Matrix模板类的对象,Matrix有 6个模板参数,主要用的前三个,其他默认的。
typedef Matrix<Scalar, RowsAtCompileTime, ColsAtCompileTime, Options> MyMatrixType;
typedef Array<Scalar, RowsAtCompileTime, ColsAtCompileTime, Options> MyArrayType;
// Scalar:数据的标量类型(e.g. float,double,bool,int,etc)
// RowsAtCompileTime:矩阵行数 rows
// ColsAtCompileTime:矩阵列数 cols
// Option:选项可以是ColMajor或RowMajor,默认是ColMajor
上面的模板里的参数可以随意组合,然后矩阵的行列数可以是固定的也可以是动态的,但是这里的动态,我感觉并不是链表什么的那样,只是在构造那个对象的时候不指定行列数,程序执行的时候还是要给行列数。我用改变大小之前矩阵里面的数会没。还有点乱,后面再看吧。动态可以重新改变矩阵大小(值得注意 resize()),且在使用 “=”的时候,若和等号右边的大小不一样,会自动变成等号右边的大小。
Matrix<double, 6, Dynamic> // Dynamic number of columns (heap allocation)
Matrix<double, Dynamic, 2> // Dynamic number of rows (heap allocation)
Matrix<double, Dynamic, Dynamic, RowMajor> // Fully dynamic, row major (heap allocation)
Matrix<double, 13, 3> // Fully fixed (usually allocated on stack)
这里面给了一些typedef,所以一些使用的时候可以用简化的类型名。
//动态大小
typedef Matrix<double,Dynamic,Dynamic> MatrixXd;
typedef Matrix<float, Dynamic, 1> VectorXf; //默认都是列向量
// 列向量
typedef Matrix<double, 3, 1> Vector3d;
// 行向量
typedef Matrix<int, 1, 3> RowVector3i;
typedef Array<double,Dynamic,Dynamic> ArrayXXd;
typedef Array<double,Dynamic,1> ArrayXd;
typedef Array<int,1,Dynamic> RowArrayXi;
typedef Array<float,3,3> Array33f;
typedef Array<double,4,1> Array4f;
2、基础矩阵操作
1)构造
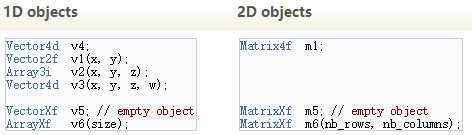
2)初始化,给矩阵元素赋值,这里有两种方式:
-
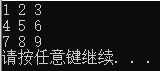
一种是"<<"操作符,用该操作符一个一个的赋值(注意顺序是从左到右,从上到下),或者一块一块的赋值。另外还有一些特殊矩阵(零矩阵,单位矩阵,常数矩阵)。
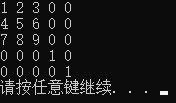
// 挨个赋值 Matrix3f m1; m1 << 1, 2, 3, 4, 5, 6, 7, 8, 9; cout << m1 << endl; // 分块儿赋值,这对两个矩阵合并有用 int rows = 5, cols = 5; MatrixXf m(rows, cols); m << (Matrix3f() << 1, 2, 3, 4, 5, 6, 7, 8, 9).finished(), MatrixXf::Zero(3, cols - 3), MatrixXf::Zero(rows - 3, 3), MatrixXf::Identity(rows - 3, cols - 3); // Zero()、Identity() 分别是0矩阵和单位矩阵。 cout << m << endl;输出 :
-
一种是按下标赋值
int rows = 5, cols = 5; MatrixXf m(rows,cols); for (int i = 0; i < rows; i++) { for (int j = 0; j < cols; j++) { m(i, j) = 2; } } cout << m << endl;输出:

-
-
特殊矩阵:
Constant(rows,cols,value); //常量矩阵 Random();//随机 Zeor();//0 Identity();//单位
3)矩阵大小获得和改变
矩阵的当前行、列、元素个数可以通过 rows(),cols(),size()来检索,这些方法分别返回行数、列数和系数数。调整动态数组的方法是通过 resize()方法。
值得注意的是这个 resize()函数,只能修改动态矩阵的大小。且 resize() 函数会析构掉原来的数据,因此调用resize() 函数之后将不能保证元素的值不改变。 使用 conservativeResize()来不改变矩阵本来内容。可以在这里搜一下这个函数具体看下用法
conservativeResize(Index rows,Index cols)//调整矩阵的大小到第x行,而保持原来的值不变。
conservativeResize(NoChange_t, Index);//只改变行数
conservativeResize(Index, NoChange_t);//只改变列数
4)运算

MatrixXf m1;
m1 = MatrixXf::Random(3, 3);
cout << m1 << endl;
cout << m1.transpose() << endl; //转置
cout << m1.conjugate() << endl; //共轭
cout << m1.adjoint() << endl; //共轭转置(伴随矩阵)
MatrixXd m2(2, 2);
m2 << 1, 2, 3, 4;
cout << m2 << endl;
cout << m2.sum() << endl;//所有元素求和
cout << m2.prod() << endl;//所有元素乘积
cout << m2.mean() << endl;//所有元素求平均
cout << m2.minCoeff() << endl;//所有元素中最小值
cout << m2.maxCoeff() << endl;//所有元素中最大值
cout << m2.trace() << endl;//迹
Vector3d v1(1, 2, 3);
Vector3d v2(4, 5, 6);
Vector3d v;
double dot_value, norm_value;
dot_value = v1.dot(v2);//点乘,得到的是标量
v = v1.cross(v2);//叉乘,得到的是向量
cout << dot_value << endl;
cout << v << endl;
norm_value = v1.norm();//求模
cout << norm_value << endl;
system("pause");
5)块操作
官网:Block operactions
块是矩阵中的矩形的子块。
矩阵Matrix 的块操作:
//矩阵的块操作:
//表示返回从矩阵的(i,j)开始,每行取P个元素,每列取q个元素,原矩阵不变
matrix.block(i,j,p,q);
//原矩阵中第(i, j)开始,获取一个p行q列的子矩阵,返回该子矩阵组成的临时 矩阵对象,原矩阵的元素不变
matrix.block<p,q>(i,j);
//获取矩阵中的某行某列
matrix.row(i);// 矩阵第i行
matrix.col(j);//矩阵第j列
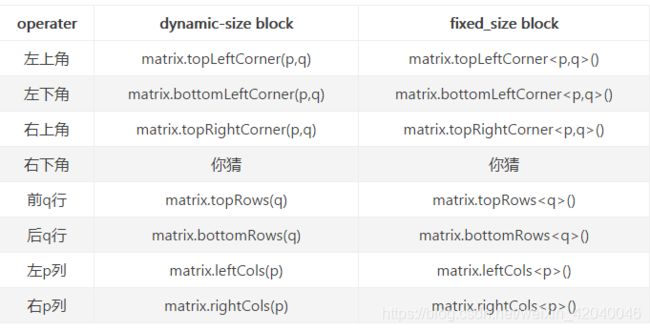
Matrix矩阵角相关操作:

向量Array 的块操作,其实光用矩阵也行,不用定义向量对象
vector.head(n);//获取向量的前n个元素
vector.tail(n);//获取向量尾部的n个元素
vector.segment(i,n);//获取从向量的第i个元素开始的n个元素