Matlab与ROS----栅格地图
一、二值栅格地图
0表示自由空间 false
1表示障碍物 true
simple.map
true true true true true true true true true true true true true true true true true true true true true true true true true true true
true false false false false false false false false false false false false true false false false false false false false false false false false false true
true false false false false false false false false false false false false true false false false false false false false false false false false false true
true false false false false false false false false false false false false true false false false false false false false false false false false false true
true false false false false false false false false false false false false true false false false false false false false false false false false false true
true false false false false false false false false false false false false true false false false false false false false false false false false false true
true false false false false false false false false true true true true true false false false false false false false false false false false false true
true false false false false false false false false false false false false false false false false false false false false false false false false false true
true false false false false false false false false false false false false false false false false false false false false false false false false false true
true false false false false false false false false false false false false false false false false false false false false false false false false false true
true false false false false false false false false false false false false false false false false false false false false false false false false false true
true false false false false false false false false false false false false false false false false false false false false false false false false false true
true false false false false false false false false false false false false false false false false false false false false false false false false false true
true true true true false false false false false false true true true true false false false false false false true true true true true true true
true false false false false false false false false false true false false false false false false false false false false false false false false false true
true false false false false false false false false false true false false false false false false false false false false false false false false false true
true false false false false false false false false false true false false false false false false false false false false false false false false false true
true false false false false false false false false false true false false false false false false false false false false false false false false false true
true false false false false false false false false false true false false false false false false false false false false false false false false false true
true false false false false false false false false false true false false false false false false false false false true true true true true true true
true false false false false false false false false false true false false false false false false false false false false false false false false false true
true false false false false false false false false false true false false false false false false false false false false false false false false false true
true false false false false false false true true true true false false false false false false false false false false false false false false false true
true false false false false false false true true true true false false false false false false false false false false false false false false false true
true false false false false false false true true true true false false false false false false false false false false false false false false false true
true false false false false false false true true true true true true true true true true true true true true true true true true true true
如图:
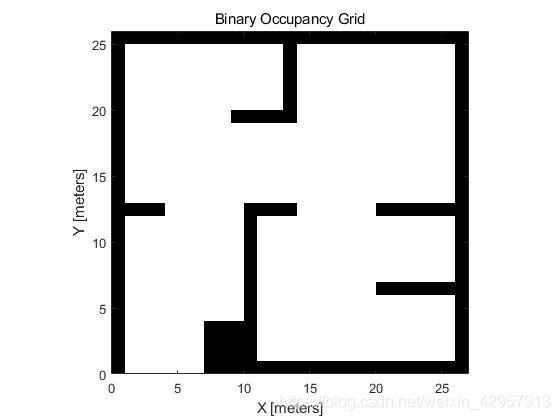
bogMap = binaryOccupancyMap(double(simpleMap));
mapMsg = rosmessage('nav_msgs/OccupancyGrid');
writeBinaryOccupancyGrid(mapMsg,bogMap)
mapMsg
bogMap2 = readBinaryOccupancyGrid(mapMsg);
show(bogMap2);