啄木鸟:用于检查石矿柱的系留无人机
地下矿井等环境面临的主要挑战之一是无法获得GNSS。由于地下无线电范围有限,远程操作也是一个挑战。因此,必须具备强大的车载导航系统(包括定位、测绘和运动规划)才能使完全自主的系统可靠运行。这里介绍了最先进的系留无人机(TUAV)的开发,它是图 1 所示的完整自主机器人系统的一部分。该系统由名为Rhino的无人驾驶地面车辆(UGV)和称为Oxpecker的TUAV组成,旨在为地下石矿支柱结构完整性提供早期预警信号。
图1.Rhino,无人驾驶地面车辆(UGV),是一个黄色和蓝色的移动机器人。Oxpecker,系留无人机(TUAV),是蓝色平台上的黑色无人机。Rhino和Oxpecker组成了一个用于地下矿山测绘的协作机器人系统
该无人机的任务要求如下:
①能够在没有人为干预的情况下操作数小时;
②能够携带测绘和测量传感器,包括激光雷达和摄像头;
③能够在从一个支柱移动到下一个支柱之前精确地降落在 UGV 上。
这些要求促使研究团队设计:
④系绳驱动的四旋翼飞行器,具有足够的有效载荷能力来携带定位和3D映射传感器,以及释放的电源线的重量;
⑤一 种系留系统,用于管理电缆释放和缩回,并通过测量相关变量(例如系绳角度和系绳长度)来帮助无人机定位和着陆;
⑥ 一种自调平着陆平台,可补偿地面车辆的滚动和俯仰并协助无人机着陆。
该设计的目标是开发一种能够由电缆供电的无人机,并具有足够的有效载荷能力来携带所需的仪器和系绳。设计这种系统的主要挑战是通过长电缆传输如此高的功率的权衡。我们的解决方案需要组合选择车架、动力总成和电缆。为了完成设计,我们选择了无人机上的飞行控制器、配套计算机和传感器套件。硬件设置的示意图如图2所示。

图2 啄木鸟电子设备的示意图。除电池组外,所有其他组件均由无人机携带
无人机和网络共享系统上的传感器用于测量系绳变量。这些传感器是编码器,它连接到绞盘并测量系线的长度,以及系线角度传感器,旨在测量系线在两个端点上的方位角和仰角,即在着陆平台和TUAV上。图3a显示了专门为平台角度测量而设计的定制3D打印传感器,而图3b显示了商用现成的操纵杆设备,该装置转换为用作TUAV侧的系线角度传感器。

图3 系绳角度传感器(a)显示具有两个自由度的运动链,用于测量平台上的方位角和仰角(b)显示了一个模拟操纵杆,适用于在无人机侧获得相同的角度
系留系统由 (1) 电缆管理系统组成,负责根据测量的张力将系线卷入或卷出来控制系线张力;(2)用于测量系绳张力的张力仪;(3) 两个系绳角度传感器。张力由一个由枢轴弹簧负载杆臂和输送滑轮组成的机构测量,系绳滑落,如图 4 所示。由伺服电机和杠杆臂组成的机构用于在转动时将电缆均匀分布在卷轴上,如图 4a(D) 所示。
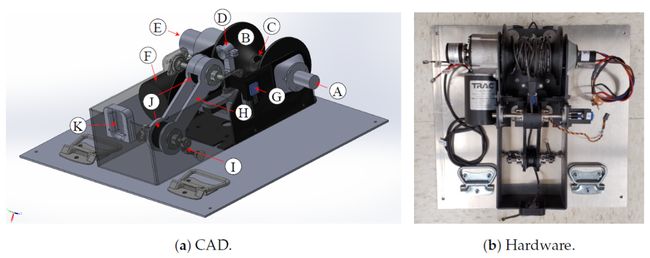
图4.电缆管理系统。(a)系统的三维CAD模型,突出显示滑环装置(A),该装置允许将电力从其外部固定框架传输到物理连接到存储电源线的定制3D打印线轴(B)的内部旋转框架。电缆进入线轴轴线,从(C)出来,穿过漏斗状装置 (D)。该设备由伺服电机驱动,伺服电机从一侧移动到另一侧,以将电缆均匀分布在线轴上。当直流电机(F)转动时,系线的长度由数字旋转编码器(E)测量。系线张力由安装在枢轴杆臂(H)轴上的电位计(G)测量,该杆臂支撑一对滑轮 (J),电缆可以在其中滑落。弹簧 (I)用于加载杠杆臂。电缆通过插座(K)进入系统。(b) 所设计系统的实际实施情况
UGV中包括一个自调平平台,为无人机着陆提供稳定的水平表面。在我们的设计中,我们使用一个三轴加速度计和两个线性执行器来调整平台姿态并保持水平,即使UGV位于不平坦的地形或斜坡上,如图5a所示。该平台有助于确保无人机安全精确地着陆,而不会翻倒或损坏自身或其周围环境。
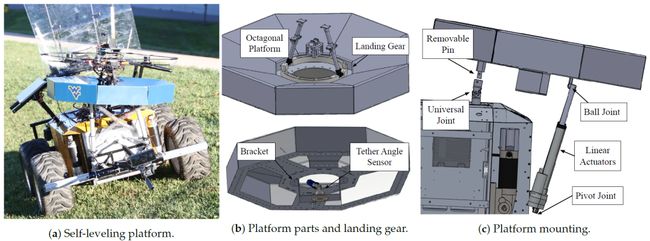
图6 AIRDATA应用程序
为了开发 TUAV 的自主框架,我们开发了一组 ROS 节点来控制无人机操作。这些节点分布在地面计算机和空中机器人之间。无人机和UGV系统及其软件的概述如图6所示。状态机节点通过启用任务节点来选择 TUAV 将执行的任务。

图6 协作自治系统框架(UAV-UGV)。左边是啄木鸟系统的示意图。右边:与无人机操作相关的Rhino子系统的示意图。圆形灰色矩形代表为操作自治系统而开发的ROS节点
真实世界的测绘实验是在位于美国宾夕法尼亚州匹兹堡的国家职业安全与健康研究所(NIOSH)运营的安全研究煤矿中进行的。在地下环境中检测精确闭环的挑战中进行了研究,其中包括提取每个图像多达500个视觉特征并检测至少20个视觉特征。此约束确保仅接受某些循环闭合。生成的映射如图7 所示。
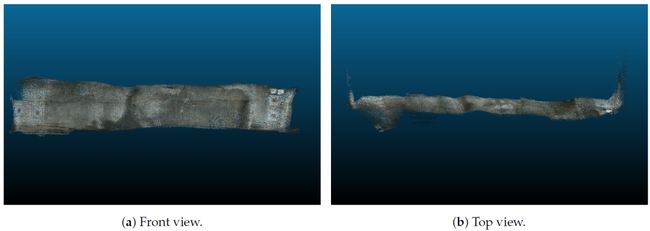
图7 柱子的典型地图。无人机通过在柱子前面的割草机模式中移动来收集数据。当检测到墙壁的边缘时,无人机会改变移动的高度和水平方向
在这些实验中,TUAV从相对于平台的不同相对位置开始。实验是在高架设施中进行的。图8显示了实验设置的图像。图8a显示了啄木鸟悬停在UGV上方,系绳完全伸展并拉紧。在图8b 中,一系列叠加快照显示了无人机接近并降落在Rhino顶部的平台上。

图8 典型的系留引导着陆。系绳被拉紧,以帮助引导无人机回到UGV携带的着陆平台
未来的工作将包括对实际石灰石矿中的系统进行全面和长期的评估。尽管我们在此类矿井中获得了初步结果(参见图9中的支柱地图),但我们从未有机会在这样的环境中测试完整的机器人系统。

图9 用DJI M3无人机获得的石矿柱和其中一个面的100D地图
我们最近实现了基于系绳的定位系统,但我们仍然依靠 T265 摄像头来提供Pixhawk控制无人机所需的信息。然后,我们未来的工作将把我们的本地化系统集成到Oxpecker的MCU中。我们相信这将提高系统的稳健性,尤其是在非常低的光照条件下。
源自:Drones 2023, 7, 73. https://doi.org/10.3390/drones7020073