robodk导出html错误,基础指南
RoboDK是一款应用于工业机器人仿真与离线编程的软件。离线编程功能意味着在电脑上编写机器人程序、经过仿真与调试之后,加载到机器人控制器后即可运行。
Tip:在RoboDK中按住F1,可显示当前被选项目的帮助信息。
本部分为RoboDK教程的基础部分。本教程基于在Windows下运行的RoboDK,我们也提供针对Mac,Linux及安卓系统的RoboDK软件版本。
通过我们的下载并安装RoboDK,双击桌面上的快捷图标 来启动RoboDK。
来启动RoboDK。
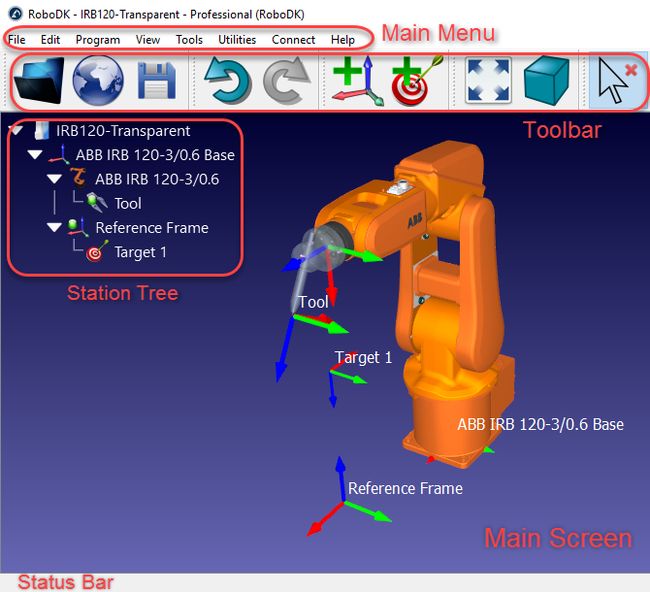
RoboDK界面内包括主菜单,工具栏,状态栏以及主要工作空间。左侧的工作站树形结构中显示当前工作站内的所有项目,例如机器人,参考坐标系,机器人工具,机器人程序等等。更多信息在)部分。
点击文件➔ 选中一个已经安装在Library文件夹中的RoboDK工作站范例(RDK文件)并打开,或者拖拽一个工作站文件进入RoboDK界面即可加载它。
选中一个已经安装在Library文件夹中的RoboDK工作站范例(RDK文件)并打开,或者拖拽一个工作站文件进入RoboDK界面即可加载它。
RoboDK的机器人可以通过网站访问,也可以在软件界面内访问。
RoboDK教程中使用三种颜色来区分不同的鼠标操作:



左键单击右键单击双击
巡航
我们建议使用3D鼠标(三键鼠标)在工作空间内进行立体视图检视。或者,可以使用Ctrl,Alt,Shift这三个按键结合鼠标左键来进行平移,旋转,缩放的动作:
选择平移旋转缩放



左键单击按住中键按住右键滚动滑轮
按住Ctrl
选择多个物体按住Ctrl + Alt并选择按住Ctrl + Shift并选择按住Shift并选择
Tip:3D鼠标的默认设置可以通过工具➔选项➔通用标签➔鼠标3D检视来改变。
在工作空间内鼠标右键点击,可以看到3D检视菜单。
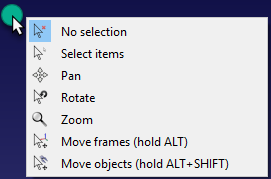
Tip:在工具栏区域右键点击,选取View与Selection选项,在工具栏中显示以下命令按钮:

开始
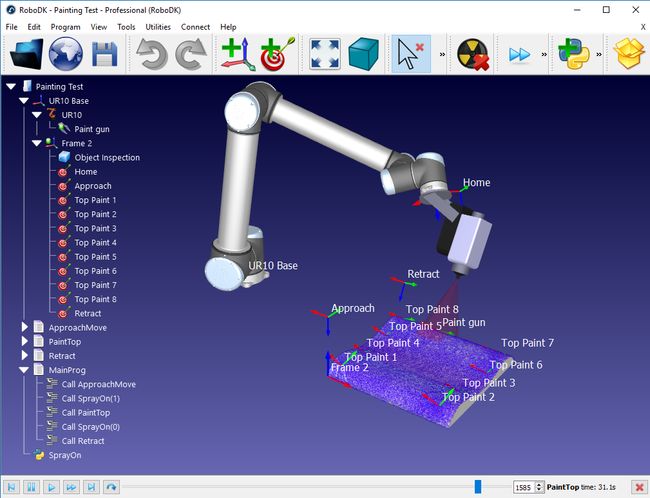
演示了如何在RoboDK中创建一个优傲UR10机器人的离线编程项目,实现喷涂应用。本范例概括了使用RoboDK仿真与离线编程的关键特点,包括:
●如何在 (在线机器人模型库)中下载机器人
(在线机器人模型库)中下载机器人
●如何 (添加机器人工具)
(添加机器人工具)
●如何![]() (添加机器人目标)
(添加机器人目标)
●如何![]() (添加离线机器人程序)并仿真
(添加离线机器人程序)并仿真
●如何![]() (生成机器人真机程序)并为机器人控制器选择相对应的后置处理器
(生成机器人真机程序)并为机器人控制器选择相对应的后置处理器
本范例文件Tutorial-UR-Painting.rdk保存在RoboDK的Library文件夹中(默认路径为C:/RoboDK/Library/)。
工具栏菜单
工具栏中包含了菜单中常用功能的快捷按钮。
Tip:选择工具➔工具栏布局Layout➔设定默认工具栏来恢复工具栏默认设置。
在默认设置下,工具栏中包含下面的命令:
打开加载一个新的文件(RoboDK工作站RDK文件)或者任何支持的文件类型(robot,tool,STEP,IGES,STL,…)
打开在线模型库显示在线模型库(机器人,工具,物体)
 保存工作站保存RoboDK工作站为RDK文件
保存工作站保存RoboDK工作站为RDK文件
 撤销撤销上一个指令(Ctrl+Z)
撤销撤销上一个指令(Ctrl+Z)
 重做重做上一个指令(Ctrl+Y)
重做重做上一个指令(Ctrl+Y)
 添加参考坐标系参考坐标系用于定位物体
添加参考坐标系参考坐标系用于定位物体
 添加机器人目标机器人目标记录机器人相对于参考坐标系的方位,也可以记录为关节坐标
添加机器人目标机器人目标记录机器人相对于参考坐标系的方位,也可以记录为关节坐标
 Fit All全视图显示工作空间内全部项目
Fit All全视图显示工作空间内全部项目
 等距视图
等距视图
显示工作空间等距视图
 移动坐标系在屏幕上使用鼠标拖拽并移动坐标系(按住Alt键)
移动坐标系在屏幕上使用鼠标拖拽并移动坐标系(按住Alt键)
 移动TCP(机器人工具中心点)在屏幕上使用鼠标拖拽并移动机器人TCP(按住Alt+Shift)
移动TCP(机器人工具中心点)在屏幕上使用鼠标拖拽并移动机器人TCP(按住Alt+Shift)
 检测碰撞开启或关闭碰撞检测功能。更多信息在(碰撞)部分。
检测碰撞开启或关闭碰撞检测功能。更多信息在(碰撞)部分。
![]() 快速仿真提高simulation speed仿真速度(按住空格键)
快速仿真提高simulation speed仿真速度(按住空格键)
![]() 暂停仿真使用空格键暂停或者恢复仿真
暂停仿真使用空格键暂停或者恢复仿真
 添加机器人仿真程序为机器人添加一个仿真程序
添加机器人仿真程序为机器人添加一个仿真程序
 添加Python程序添加一个新的Python脚本程序
添加Python程序添加一个新的Python脚本程序
 关节运动指令添加一个新的关节运动指令
关节运动指令添加一个新的关节运动指令
 线性运动指令添加一个新的线性运动指令
线性运动指令添加一个新的线性运动指令
 导出仿真文件将仿真程序导出为3D PDF或者3D HTML文件。(范例)
导出仿真文件将仿真程序导出为3D PDF或者3D HTML文件。(范例)
Note:有关其他命令的更多信息在部分。
捷径
下面列出了有用的快捷键,以及它们所代表的工具栏命令按钮:
Alt移动坐标系
Alt+Shift移动TCP(工具中心点)
F1 显示帮助指导
显示帮助指导
F2重命名所选项目
F6 为所选仿真程序生成机器人可读程序
为所选仿真程序生成机器人可读程序
F7显示/隐藏所选项目
Alt+0选择项目后全景视图
Ctrl+1加载最近一个文件或者工作站
/显示/隐藏文字
+放大坐标系
−缩小坐标系
*显示/隐藏机器人工作空间
Tip:使用加号键(+)与减号键(-)调整坐标系大小,合适的坐标系大小方便用户在按住Alt键时抓取坐标系并移动物体。
参考坐标系
参考坐标系用于定义一个项目的方位,相对于另一已知位置与方向的项目。一个项目可以是一个物体,一台机器人或者另一参考坐标系。任何离线编程应用都需要定义一个参考坐标系,以便定位物体与机器人之间的方位关系,并以真实数据更新仿真。
拖拽工作站树形结构中的任一坐标系或物体来定义它们的关系,例如下图中所示的嵌套坐标关系。
在机器人应用中,使用机器人末端标定3点来定义一个或多个参考坐标系是很常见的办法,这样物体可以被置于虚拟空间内。该操作可以通过利用机器人示教器或者RoboDK来实现(更多信息参考标定参考坐标系部分)。
Tip:按住Alt键移动任一参考坐标系。或者,在工具栏中点击![]() 按钮。
按钮。
在RoboDK内还可以手动输入平移与旋转数值,包括选取不同的欧拉角旋转顺序。
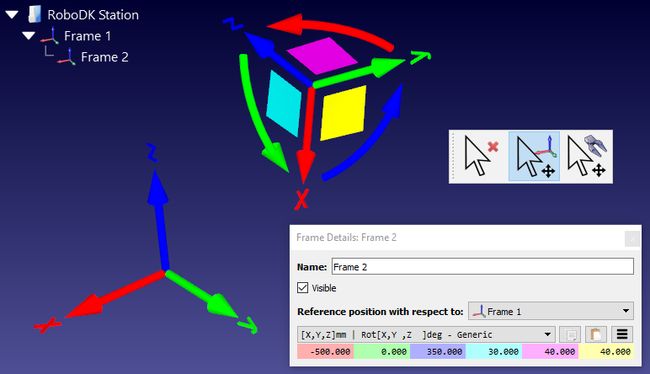
Note:一个参考坐标系与另一参考坐标系之间的关系也被称为姿态(包括位置与方向)。一个姿态可以通过XYZ坐标表达位置及欧拉角来表达方向,或者通过XYZ坐标表达位置及四元数来表达方向,又或者通过一个4乘4的矩阵来表达一个完整的姿态。
在默认设置下,RoboDK显示参考坐标系之间的关系为XYZ坐标及X➔Y➔Z顺序的欧拉角格式。这意味着几何旋转将按照下面的顺序:
1.首先:围绕X轴旋转一个角度(浅蓝底色数值)
2.接着:围绕静态Y轴旋转一个角度(粉色底色数值)
3.最后:围绕静态Z轴旋转一个角度(黄色底色数值)
发那科(Fanuc)与安川(Motoman)机器人的控制器接受以上所描述的旋转格式。但是,其他机器人生产商使用的是不同的旋转顺序。
Note:RoboDK自动为每个机器人选择正确的旋转格式。
在参考坐标系详情窗口中(双击一个坐标系即可打开),可以从下拉菜单中选取不同的旋转格式。
Tip:生成机器人程序时,RoboDK自动生成与控制器相匹配的旋转格式数值(通过后置处理器)。
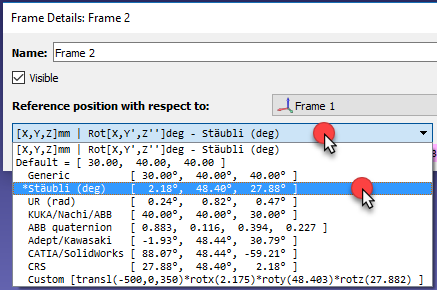
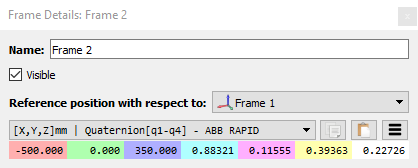
例如,史陶比尔(Stäubli)机器人使用X➔Y’➔Z’’顺序,库卡(KUKA)机器人与那智(Nachi)机器人使用Z➔Y’➔X’’顺序。另外,ABB机器人控制器使用四元数旋转格式,这需要4个数值来定义一个旋转:
用户还可以自定义姿态格式。例如,当使用Script脚本选项(自定义姿态)编程时会显示下面的指令:

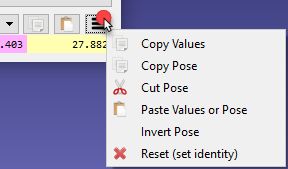
Tip:使用下拉菜单右侧的按钮,可以复制/粘贴姿态数值(6个数值)或者4乘4姿态矩阵。还可以反向当前变换矩阵(反向姿态)或者重置(设为单位矩阵)。
Note:在(选项菜单)中可以选择默认的欧拉角旋转方向:工具-选项-通用标签-默认欧拉角格式。
默认设置
选择工具➔选项并选择设定默认设置可恢复默认设置。更多信息在(选项菜单)部分。
选择工具➔语言为软件环境选择语言。
选择工具➔工具栏布局➔设定默认工具栏来恢复工具栏默认设置。
选择工具➔选项➔其他➔设定默认Python设置来恢复默认Python设置。更多信息在部分。
Important:RoboDK要求支持OpenGL v3.2及以上的显卡驱动。
无法启动RoboDK?
当使用远程桌面连接,或者在虚拟电脑上运行RoboDK时可能会有困难。尝试双击下面的文件来启动RoboDK:
C:/RoboDK/RoboDK-Safe-Start.bat
以上指令使用的是软件模拟的OpenGL,不需要显卡支持。适用于远程桌面连接或者虚拟电脑运行RoboDK。