Linux0.11内核源码解析-bootsect.s
学习资料:
Linux内核完全注释
操作系统真像还原
极客时间-Linux内核源码趣读
Linux0.11内核源码
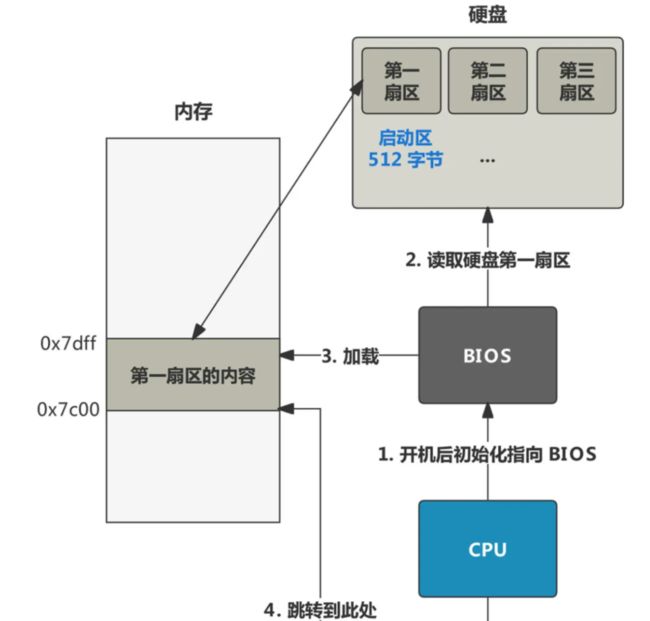
->上电
->80x86架构CPU会自动进入实模式
->从地址0xffff0自动执行程序代码
->bios执行系统检测,从物理地址0初始化中断向量,将第一个引导扇区512字节读入内存绝对地址0x7c00(BIOS把512字节的二进制数据从硬盘搬到内存中,作为操作系统的开发人员,我们只需要把代码放到0盘0磁道1扇区即可,对应的代码是bootsect.s)

->跳转到0x7c00(31KB)
->0x7c00当被执行的时候会把自己搬到0x90000(576KB)处,并把启动设备中后2KB代码(setup.s)读到0x90200处
# ROOT_DEV: 0x000 - same type of floppy as boot. 根文件系统设备使用与引导同样的软驱设备
# 0x301 - first partition on first drive etc 根文件系统设备在第一个硬盘的第一个分区上
# 0x300 /dev/hd0
# 0x301 /dev/hd1
# ...
# 0x304 /dev/hd4
# 0x305 /dev/hd5 第二个硬盘
# 0x306 /dev/hd6 第二个硬盘第一个分区
.equ ROOT_DEV, 0x301
ljmp $BOOTSEG, $_start
_start:
# ds = 0x07c0
mov $BOOTSEG, %ax
mov %ax, %ds
# es = 0x9000
mov $INITSEG, %ax
mov %ax, %es
# move 256 word from 0x7c00(DS:SI) to 0x9000(ES:DI)
#ds:si=0x07c0:0x0000
#es:di=0x9000:0x0000
mov $256, %cx
sub %si, %si
sub %di, %di
rep
movsw
#间接跳转0x9000
ljmp $INITSEG, $go
# 代码段移动后,重新设置堆栈段
go: mov %cs, %ax
mov %ax, %ds
mov %ax, %es
# put stack at 0x9ff00.
# cs=0x9000 ss=0x9000 sp=0xff00
mov %ax, %ss
mov $0xFF00, %sp # arbitrary value >>512
int 0x13
功能02H
功能描述:读扇区
入口参数:AH=02H
AL=扇区数
CH=柱面
CL=扇区
DH=磁头
DL=驱动器,00H~7FH:软盘;80H~0FFH:硬盘
ES:BX=缓冲区的地址
功能00H
功能描述:磁盘系统复位
入口参数:AH=00H
DL=驱动器,00H~7FH:软盘;80H~0FFH:硬盘
出口参数:CF=0——操作成功,AH=00H,否则,AH=状态代码,参见功能号01H中的说明
load_setup:
mov $0x0000, %dx # drive 0, head 0
mov $0x0002, %cx # from sector 2, track 0
mov $0x0200, %bx # address = 512, in INITSEG
.equ AX, 0x0200+4 # read 4 sector
mov $AX, %ax # service 2, nr of sectors
int $0x13 # read it
jnc ok_load_setup # ok - continue
mov $0x0000, %dx
mov $0x0000, %ax # reset the diskette
int $0x13
jmp load_setup功能08H
功能描述:读取驱动器参数
入口参数:AH=08H
DL=驱动器,00H~7FH:软盘;80H~0FFH:硬盘
出口参数:CF=1——操作失败,AH=状态代码,参见功能号01H中的说明,否则, BL=01H — 360K
=02H — 1.2M
=03H — 720K
=04H — 1.44M
CH=柱面数的低8位
CL的位7-6=柱面数的该2位
CL的位5-0=扇区数
DH=磁头数
DL=驱动器数
ES:DI=磁盘驱动器参数表地址
ok_load_setup:
# Get disk drive parameters, specifically nr of sectors/track
mov $0x00, %dl
mov $0x0800, %ax # AH=8 is get drive parameters
int $0x13
mov $0x00, %ch
#seg cs
mov %cx, %cs:sectors+0 # %cs means sectors is in %cs 保存磁道扇区数
mov $INITSEG, %ax
mov %ax, %es #磁盘参数中断改掉了es的值,恢复es寄存器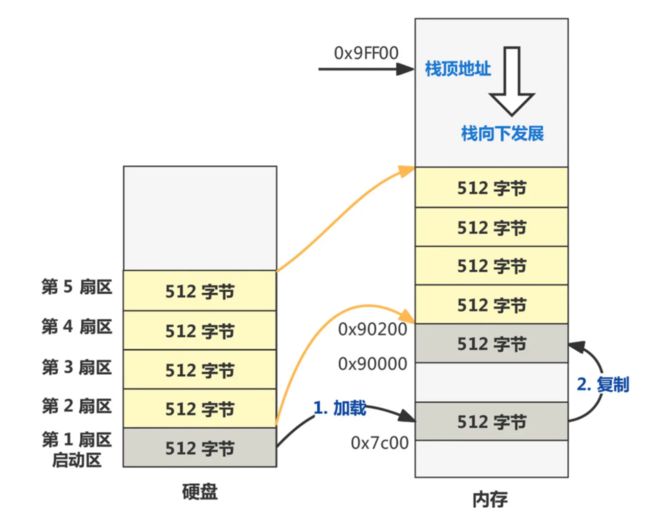
# 后续装载系统模块需要装载240个扇区,是之前装载扇区数量的60倍,在此处显示一条信息提示用户等待
# Print some inane message
mov $0x03, %ah # read cursor pos
xor %bh, %bh
int $0x10
mov $24, %cx
mov $0x0007, %bx # page 0, attribute 7 (normal)
#lea msg1, %bp
mov $msg1, %bp
mov $0x1301, %ax # write string, move cursor
int $0x10把system 240个扇区拷贝到0x10000,关闭软驱电机
# ok, we've written the message, now
# we want to load the system (at 0x10000)
mov $SYSSEG, %ax
mov %ax, %es # segment of 0x010000
call read_it
call kill_motor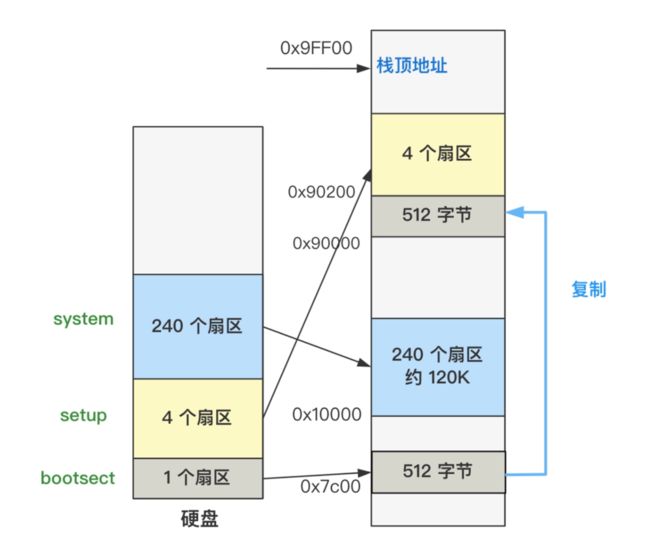
检查要使用哪个根文件系统设备,如果指定了设备!=0,就直接使用指定设备,否则根据BIOS报告的磁道扇区数来确定是用那个设备
跳转setup.s 0x90200
# After that we check which root-device to use. If the device is
# defined (#= 0), nothing is done and the given device is used.
# Otherwise, either /dev/PS0 (2,28) or /dev/at0 (2,8), depending
# on the number of sectors that the BIOS reports currently.
#seg cs
mov %cs:root_dev+0, %ax # Root Device根文件系统设备
cmp $0, %ax # 判断根设备号是否为0
jne root_defined # ZF = 0时跳转,即ax不为0时,即根设备已设置
#seg cs
# 根设备未设置
mov %cs:sectors+0, %bx
mov $0x0208, %ax # /dev/ps0 - 1.2Mb
cmp $15, %bx # 取上面获取到每磁道扇区数,如果sectors=15则说明是1.2Mb的驱动器
je root_defined
mov $0x021c, %ax # /dev/PS0 - 1.44Mb
cmp $18, %bx # 取上面获取到每磁道扇区数,如果sectors=18则说明是1.44Mb的软驱
je root_defined
undef_root: # down机
jmp undef_root
root_defined:
#seg cs
mov %ax, %cs:root_dev+0
# after that (everyting loaded), we jump to
# the setup-routine loaded directly after
# the bootblock:
ljmp $SETUPSEG, $0如果ES在64k,0x1000边界上,就立刻停止
# This routine loads the system at address 0x10000, making sure
# no 64kB boundaries are crossed. We try to load it as fast as
# possible, loading whole tracks whenever we can.
#
# in: es - starting address segment (normally 0x1000)
#
sread: .word 1+ SETUPLEN # sectors read of current track
head: .word 0 # current head
track: .word 0 # current track
read_it:
mov %es, %ax
test $0x0fff, %ax # TEST指令按位进行逻辑与运算,与AND指令的区别是两个操作数不会被改变
die: jne die # es must be at 64kB boundary
xor %bx, %bx # bx is starting address within segment
rp_read:
mov %es, %ax
cmp $ENDSEG, %ax # have we loaded all yet?
jb ok1_read
ret
# 计算和验证当前磁道需要读取的扇区数,放在ax寄存器中,根据当前磁道未读取的扇区数以及段内数据字节开始偏移位置,
# 计算如果全部读取这些未读扇区,所读总字节数是否超过64KB段长度的限制,若会超过,则根据此次最多读入的字节数(64KB-段内偏移位置),反算出此次需要读取的扇区数
ok1_read:
#seg cs
mov %cs:sectors+0, %ax # 获取磁道扇区数
sub sread, %ax # 减去当前磁道已读扇区数
mov %ax, %cx # cx = ax = 当前磁道未读扇区数
shl $9, %cx # cx = cx * 512
add %bx, %cx # cx = cx + bx段内当前偏移值
jnc ok2_read # 没有超过64KB字节,则跳转ok2_read
je ok2_read
xor %ax, %ax # 加上此次将读磁道上所有未读扇区时会超过64KB
sub %bx, %ax # 此时最多能读入字节数(64KB-段内读偏移位置),再转换
shr $9, %ax # 读取扇区数
ok2_read:
call read_track
mov %ax, %cx # 该次操作已读扇区数
add sread, %ax # 当前磁道上已经读取的扇区数
#seg cs
cmp %cs:sectors+0, %ax # 如果当前磁道上的还有扇区未读,则跳转到ok3_read
jne ok3_read # 读该磁道的下一磁头面上的数据,如果已经完成,则去读下一磁道
mov $1, %ax
sub head, %ax # 判断当前磁头号
jne ok4_read # 如果是0磁头号,则再去读1磁头面上的扇区数据
incw track # 否则去读下一磁道
ok4_read:
mov %ax, head # 保存当前磁头号
xor %ax, %ax # 清当前磁道已读扇区数
ok3_read:
mov %ax, sread # 保存当前磁道已读扇区
shl $9, %cx # 上次已读扇区数*512字节
add %cx, %bx # 调整当前段数据开始位置
jnc rp_read # 小于64KB边界值,则跳转到rp_read,继续读数据
mov %es, %ax # 否则调整当前段,为读下一段数据作准备
add $0x1000, %ax # 将段基址指向为下一个64KB内存开始处
mov %ax, %es
xor %bx, %bx # 清段内数据开始偏移值
jmp rp_read
# 读当前磁道上指定开始扇区和需读扇区数的数据到es:bx,参见第67行下对BIOS磁盘读中断
# int 0x13, ah=2
# al 需读扇区数;es:bx 缓冲区开始位置
read_track:
push %ax
push %bx
push %cx
push %dx
mov track, %dx # 取当前磁道
mov sread, %cx # 取当前磁道上已读扇区数
inc %cx # cl开始读扇区
mov %dl, %ch # ch当前磁道号
mov head, %dx # 取当前磁头号
mov %dl, %dh # dh 磁头号
mov $0, %dl # dl 磁动器号,0表示当前A驱动器
and $0x0100, %dx # 磁头号大于1
mov $2, %ah # ah = 2,读磁盘扇区功能号
int $0x13
jc bad_rt # 出错则跳转bad_rt
pop %dx
pop %cx
pop %bx
pop %ax
ret
# 执行驱动器复位操作,再跳转到read_track重试
bad_rt: mov $0, %ax
mov $0, %dx
int $0x13
pop %dx
pop %cx
pop %bx
pop %ax
jmp read_track
#/*
# * This procedure turns off the floppy drive motor, so
# * that we enter the kernel in a known state, and
# * don't have to worry about it later.
# */
kill_motor:
push %dx
mov $0x3f2, %dx
mov $0, %al
outsb
pop %dx
ret
sectors:
.word 0
msg1:
.byte 13,10
.ascii "Loading system ..."
.byte 13,10,13,10
.org 508
root_dev:
.word ROOT_DEV
boot_flag:
.word 0xAA551. 把 bootsect.s 编译成 bootsect 放在硬盘的 1 扇区;2. 把 setup.s 编译成 setup 放在硬盘的 2~5 扇区;3. 把剩下的全部代码(head.s 作为开头,与各种 .c 和其他 .s 等文件一起)编译并链接成 system,放在硬盘的随后 240 个扇区
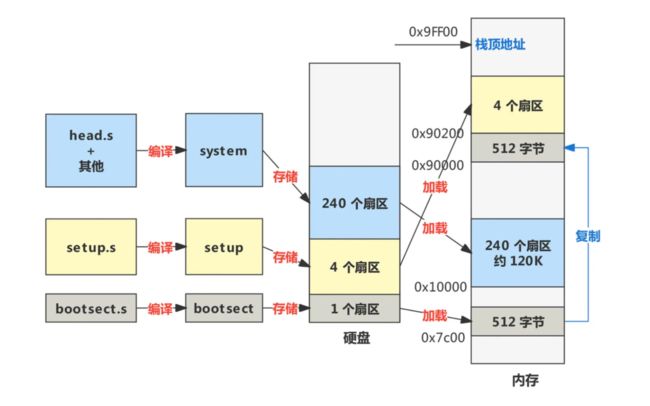
为什么不把系统模块直接加载到物理地址0x0000处运行,而要在setup中进行移动,这是因为setup程序代码开始部分需要利用BIOS的中断获取机器的一些参数,BIOS初始化的时候会在物理内存开始处放置大小为0x400字节(1kb)的中断向量表,因此需要在BIOS中断调用后才能将这个区域覆盖掉。
