单片机STM32有什么推荐的裸机编程架构
作者:DBinary
链接:https://www.zhihu.com/question/438340661/answer/2735154401
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
按我自己接触的一些项目来说,我写裸机程序的数量远大于上rtos的频率,就我接触的范围内我个人认为rtos很多时候处于一种很尴尬的地位,属于那种比上不足,比下有余的那种地位:
一是很大一部分逻辑较为简单的项目,看不到rtos能够有多少优势,反而为项目调试带来了一些干扰和麻烦,而一个项目如何擦屁股和如何更方便的擦屁股基本是一个项目最优先需要考虑的问题,因此对于逻辑简单的业务,我还是很同意你们老大的观点,没有上系统的必要.裸机程序代码就那么点,直接调试直接上手出了问题反而好找.
二是对于一些比较复杂的系统,基本会考虑上linux内核,这类平台一般性能足够,能查到的资料也很多,核心板厂商基本会提供一整套参考资料,把源码和bin洗干净,打扮好送到你房间,然后你就能依照提供的通用接口来写代码,很省事,而且写好后很多其它移植linux平台的项目也能用,还是非常舒服的.
对于裸机程序,90%以上项目都是main上套了一个大循环,里面是一堆FSM,谈不上什么优秀的架构,但绝对是最多使用的架构,对于功能较少的项目,写起来简单快捷效果好,但比较麻烦的是功能一多就各种状态写的又臭又长,到后面自己都不知道自己在些什么了,也很容易糊屎山,但裸机程序绝大多数情况适用,优点缺点参半,逻辑真不复杂的话,用这个问题不大完全ok,也许不是最好的,但肯定是绝大多数时候能用够用的.
说一个其它的思路是以前f0,f1芯片性能资源都不太够,但最近很多项目都渐渐往f4甚至f7上迁移了,所以有的时候会移植脚本引擎上去,然后在片上跑业务脚本,优点是很稳,非常非常的稳,很容易定位业务逻辑代码bug部分比如越界访问,错误传参之类的,即使脚本写出问题了,这部分虚拟机也可以直接重置重来,不至于把整个系统搞崩最后又得搞看门狗,又是处理异常中断来擦屁股,缺点是只适合那种实时性要求不高的项目,占用资源也大,适用范围不宽,如果不知道自己在做什么不建议用.
再说自己一直在用的一个解决问题的好办法,这个不是架构问题,现在我写MCU类程序,一般也不会直接用仿真器直接上keil调了,这个是最后一步,正常的做法应该是剥离硬件相关部分,把逻辑代码剥离出来在PC上架一个虚拟环境来调试,等做的比较稳定后,再对接实际的硬件直接接口往下层MCU上移植,好处很多,一个是可以充分使用Visual studio强大的调试和性能分析功能,找bug什么的会比直接mcu上调快几倍几十倍,二是要换平台换MCU也很方便,直接改改底层就能用了,是减少项目库鲁西的一个好办法
78 人赞同了该回答
我来自荐一下自己的轻量级RTOS,具有如下特色:1、事件式工作机制,用户态按优先级抢占(具有高实时性)2、无线程下的支持事件优先级抢占(资源开销非常小)3、支持在中断中触发一个事件(这对硬件驱动非常有用)4、支持无限个定时器事件,高分辨率64位时钟,时钟精确到硬件级tick5、效率高,且小Code < 512B,RAM < 64B6、支持所有Cortex-M系列CPU7、支持协程(无栈式协程)8、很容易实现自动低功耗
我曾经使用它,在一颗蓝牙MCU(主频为16M,16K FLASH,4K RAM),实现蓝牙协议栈(controller+host, 如今已大量出货),做到微秒级实时性,系统的开销为裸机级别。eventRTOSgithub.com/xiaoliang314/eventRTOS
作者:tangxuejin
链接:https://www.zhihu.com/question/438340661/answer/1666474784
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
真正值得推荐的大概只有**MultiTimer,可能不算得上架构,就是个定时器,不过相当可用!**
github链接是 https://github.com/0x1abin/MultiTimer。
我首次听说这个MultiTimer我是在 rt-thread公众号上一篇文章看到的。仔细研究了一下,挺不错的,我已经用到我的程序里了。
还有一个我也要推荐一下,是最近发现的,算得上是真正的裸机架构,叫microLite,
他有个公众号microlite裸机系统,有个简介,我摘在下面 你看一下就知道多么强大了,
- 内核调度子系统。microLite所谓的内核即软件定时器,主要为应用层的任务提供调度(以及其他定时场景的应用,如变量自增等)。软件定时器组件API接口设计简洁,使用方便灵活。
- 文件系统。microLite设计了精简的虚拟文件系统Vfs,采用fatfs文件系统模块。虚拟文件系统Vfs将fatfs文件系统抽象为统一的API接口进行访问,极大的简化了开发流程。支持日志存储组件、多路并发循环文件记录组件。
- 网络子系统。microLite以lwip协议栈为基础,实现了一组极简版udp socket裸机API接口。 另外microLite还提供了一些应用协议,如nctp、mqtt、telnet、tftp、sntp等。支持UART、CAN通信组件。
- 启动引导子系统。microLite的启动引导Bootloader支持RS232、TCPIP、CAN三种通信方式进行更新程序,其中TCPIP和CAN支持多站点组网。PC端操作界面简洁易用。
- CPU库和驱动子系统。microLite支持的 CPU IP 核架构,当前主要支持 ARM Cortex 3/4。驱动包括BSP和硬件抽象等。
- 轻量级lua脚本引擎。lua脚本语言接口建立在其他子系统API接口之上。主要用于配置、硬件测试等场合。
这个公众号可能是刚弄不久 目前文章不算多,不过你可以看一看思路
他那bootloader还拍个视频 我觉得挺牛逼的
还有一个叫傻孩子的 叫裸机思维的公众号 有介绍状态机,写的挺详细的,尽管我还没用上 不过你可以研究一下。里面有挺多介绍其他方面挺细的
首先,优先使用操作系统,这个和代码量,工程复杂度没有关系,用操作系统能很好的切割代码,而且安全可靠,如果用rtthread的话,很多组建都不需要自己移植,
裸机的话,尽量把硬件和软件分割开来,尽量模块化,降低耦合性。
架构啥的,能用中断就不用poll,能异步就不同步,再就是一个函数尽量不要超过100行。超过了就分割,切成多个函数,封装起来
作者:DaLin
链接:https://www.zhihu.com/question/438340661/answer/2448238096
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
(2022-5-20)最近在做单片机的软件架构,整改了多个版本,这里放一个初版本的软件架构图吧,仅供参考
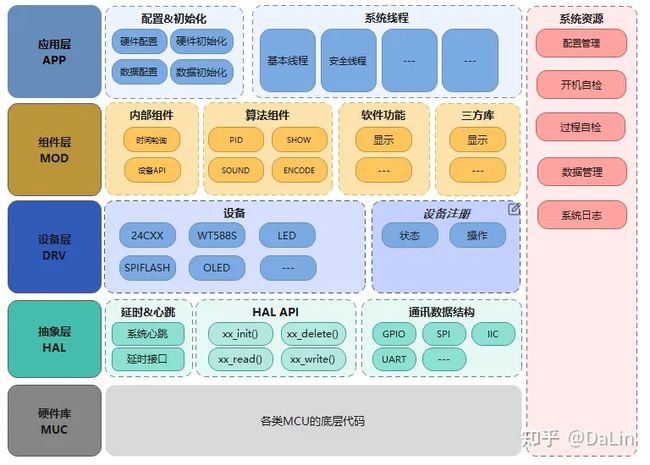
系统软件架构-v0.1
我也来毛遂自荐一下自己写的一个系统吧,源代码的注释还是挺详细的
GitHub - DaLinYYY/LinRTOS: 之前写的一个简易RTOS系统,基于MDK平台,工程自动适配Cortex M0/M3/M4github.com/DaLinYYY/LinRTOS
Pandas/LinRTOSgitee.com/daliny/lin-rtos
本项目为2021年自己从零到一写出来的简易RTOS系统,目的是为了能更加深入的学习RTOS系统及底层运行的逻辑,项目命名为"LinRTOS",为什么会取这个名字呢?
LinRTOS开发基于MDK平台,目前工程工程自动适配Cortex M0/M3/M4,通过软件验证过所有的功能模块均正常工作
参考说明
写该系统主要参考的有两个知名的RTOS框架:为FreeRTOS和RT-Thread,FreeRTOS从远源码角度进行学习的,RT-Thread从Api的命名及系统框架结构上进行了一定借鉴。
这里想对国内的RT-Thread做定义说明,都知道老牌FreeRTOS是免费商业使用,其实RT-Thread也是可免费商业使用,只是RT-Thread有扩展的增值服务才需要进行收费,RT-Thread相对FreeRTOS来说有一个很好的有点,就是有大量的官方中文文档可以进行学习和参考。
- github master代码仓上你能看到的都是开源、免费的,可以免费商用
LinRTOS命名
函数命名规则主要参照FreeRTOS:
变量名
定义变量的时候往往会把变量的类型当作前缀加在变量上,这样的好处是让用户一看到这个变量就知道该变量的类型:
- c : char 型变量.
- s : short 型变量.
- l : long型变量.
- x : portBASE_TYPE类型变量,数据结构,任务句柄,队列句柄等定义的变量名.
- u : 无符号型的前面.
- p : 指针变量的前面.
例:当我们定义一个无符号的 char 型变量的时候会加一个 uc 前缀,当定义一个char 型的指针变量的时候会有一个 pc 前缀。
函数名
函数名包含了函数返回值的类型、函数所在的文件名和函数的功能,如果是私有的函数则会加一个 prv(private)的前缀。
在函数名中加入了函数所在的文件名,这大大的帮助了用户提高寻找函数定义的效率和了解函数作用的目的,具体的举例如下:
- vTaskPrioritySet()函数的返回值为 void 型,在 task.c这个文件中定义。
- xQueueReceive()函数的返回值为 portBASE_TYPE 型,在 queue.c 这个文件中定义。
- vSemaphoreCreateBinary()函数的返回值为 void 型,在 semphr.h 这个文件中定义。
LinRTOS系统框架
这里称系统架构其实也不是很合理的,因为LinRTOS只提供了在ARM的架构之上的内核层面的任务调度和消息处理和对硬件进行一定的抽象,内核层上面的组件框架和在上层的业务逻辑层是没有去实现的。
虽然目前只实现了内核层部分,想要这个系统更加的完善,还需要添加部分必要的组件和安全的框架进去,这里先给自己埋一个坑吧,后面有机会在来进行进一步的完善。

LinRTOS Kernel
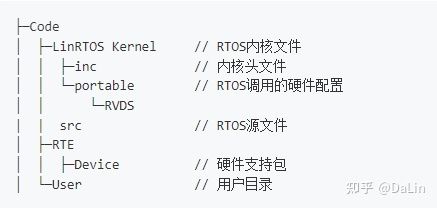
工程文件结构
Kernel框架
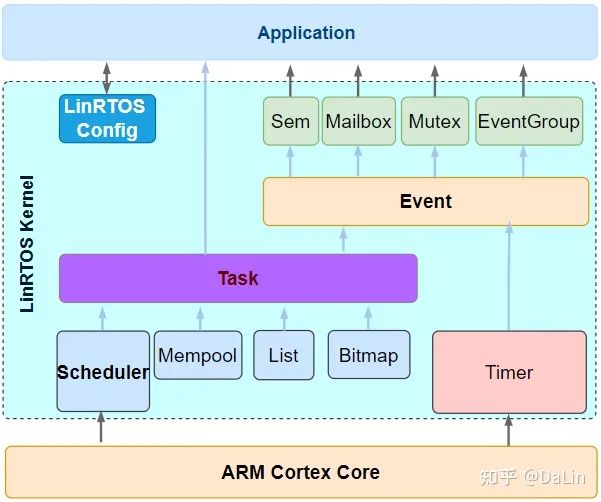
对RTOS来说,任务调度是最核心的东西,这里面涉及到优先级调度算法,调度逻辑,及系统运行在硬件平台的一些基础知识点,上面说的所有的东西都是在Task.c和Task.h中来实现的。所以,Task也是RTOS中最重要的文件之一。
LinRTOS Config: 整个系统的配置文件,可以配置需要使用那些RTOS资源,优先级的个数等。
Task: RTOS最核心的模块,负责具体的任务调度的实现。
Event:事假核心文件,提供给各种类型的消息,信号公用的模块。
- Sem: 信号量: 可用于任务的同步和计数,提供增删改查功能。
- Mutex: 互斥信号量,用于任务的同步,具有互斥属性(用了来防止优先级翻转问题),提供增删改查功能。
- EventGroup: 事件标志组,用了多任务之间的同步,和信号量不同的是,可以实现一对多,多对多的同步。 即一个任务可以等待多个事件的发生:可以是任意一个事件发生时唤醒任务进行事件处理;也可以是几个事件都发生后才唤醒任务进行事件处理。同样,也可以是多个任务同步多个事件。
- Mailbox: 邮箱通讯,同于任务间数据信息传输,提供增删改查功能。
Scheduler: 操作硬件相关的任务中断,为任务的切换提供入口。
Mempool:为任务分配空间资源的管理文件。
List: 提供最基础的双向通用列表,可以进行增删改查。
Bitmap: 优先级调度算法的数组遍历映射文件。
Timer: 给真个RTOS计数的模块。
裸机还真没考虑过什么架构,就像楼上说的main里面while到底。
说到底应该还是对rtos不太了解导致的死机吧。
先查下是整个板子死机还是某几个线程死了。
额外开个优先级最高的线程,间隔1秒print一些调试信息。在死机时查查print信息是否还有在输出,可以确认这个线程挂了没。
如果线程全挂,重点查下每个线程的stack size是不是太小,默认值在函数嵌套比较深时是不太够用的,还有子函数是否有声明较大的局部变量,另外查查野指针之类的问题。
如果最高优先级线程活着,查查是否信号量互锁的问题,以及多线程之间的协作设计有误。
遇到问题需要先查出原因而不是逃避,就算逃到裸机也会遇到其它问题的。
F4这么好的性能不上rtos可惜了,裸机编程折腾死你
作者:追风筝的人
链接:https://www.zhihu.com/question/438340661/answer/2443068345
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
可以参考我的开源项目:基于循环时间的跨平台多任务管理系统(可用于MCS51,STM32等单片机)
1. 简介
1.1 系统简介
基于循环时间的跨平台任务管理系统(可用于MCS51,STM32等单片机)
1.2 文件目录说明
- TaskManager_c:c语言实现的任务管理系统
- TaskManager_cpp:c++实现的任务管理系统
- Demo:提供多种示例,涵盖电脑模拟器(MSVC),STM32,8081等多种运行环境
2. 用法(C语言版)
2.1 API用法
系统配置(TaskManager_config.h):
- MAX_TASK_NUM:最大任务数量,默认为10个,根据自己的需要修改
- SYS_CYCLE_TIME:系统的循环时间(单位为ms),默认为 1,表示1ms 【注】在MSVC下,SYS_CYCLE_TIME 只能为1,系统循环时间为1s
- 编译器:目前支持的编译器为 ARM_KILL (AC5和AV6均可) 和 WIN_MSVC
API接口(TaskManager_c):
- TaskMsg:【结构体】任务信息,结构体成员为 任务函数,开始时间,周期时间,运行次数,PID任务函数:只能是无参数,无返回值的函数,不能是阻塞函数开始时间:任务开始运行的时间,START_NOW 表示立即开始运行 周期时间:任务每周期时间运行一次 运行次数:任务需要运行的次数,RUN_FOREVER 表示无穷次 PID:任务编号号,初始化的时候传入 PID_INIT
- void TM_init():系统初始化
- uint32_t TM_add_task(TaskMsg* new_task_msg):添加任务
- void TM_kill_by_PID(uint32_t PID):通过任务序号删除任务
- void TM_kill_by_taskmsg(TaskMsg* task_msg):通过任务信息删除任务
- void TM_run(void):运行系统
示例代码1:
#include "taskmanager.h"
#include "TaskManager_config.h"
#include "stdio.h"
// 任务1
void task1(void)
{
printf("task1!\n");
}
// 任务2
void task2(void)
{
printf("task2!\n");
}
void main(void)
{
TM_init();
// 任务1立即启动,每2ms中运行一次,无休无止的运行
TaskMsg tasks_msg1 = { task1,START_NOW,2,RUN_FOREVER,0 };
TM_add_task(&tasks_msg1);
// 任务2在1ms之后启动,每4ms运行一次,运行5次自动结束
TaskMsg tasks_msg2 = { task2,1,4,5,0 };
TM_add_task(&tasks_msg2);
while (1)
{
// 任务管理器启动
TM_run();
}
}
示例代码2 [Demo/MSVC/c_language]
#include "../TaskManager/taskmanager.h"
#include "../TaskManager/TaskManager_config.h"
#include "stdio.h"
void task0(void)
{
static i = 1;
printf_s("\n%d:", i);
i++;
}
void task1(void)
{
printf_s("task1!");
}
void task2(void)
{
printf_s("task2!");
}
void main(void)
{
TM_init(1);
TaskMsg tasks_msg0 = { task0,START_NOW,1,RUN_FOREVER,0 };
int PID0 = TM_add_task(&tasks_msg0);
TaskMsg tasks_msg1 = { task1,START_NOW,2,RUN_FOREVER,0 };
int PID1 = TM_add_task(&tasks_msg1);
TaskMsg tasks_msg2 = { task2,START_NOW,4,RUN_FOREVER,0 };
int PID2 = TM_add_task(&tasks_msg2);
while (1)
{
TM_run();
if (get_systime() > 10)
tasks_msg1.period = 1;
if (get_systime() > 20)
TM_kill_by_PID(PID1);
if (get_systime() > 30)
TM_kill_by_taskmsg(&tasks_msg2);
if (get_systime() > 40)
return;
}
}
运行结果:
1:task1!task2!
2:
3:task1!
4:
5:task1!task2!
6:
7:task1!
8:
9:task1!task2!
10:
11:task1!
12:
13:task1!task2!
14:task1!
15:task1!
16:task1!
17:task1!task2!
18:task1!
19:task1!
20:task1!
21:task2!
22:
23:
24:
25:task2!
26:
27:
28:
29:task2!
30:
31:
32:
33:
34:
35:
36:
37:
38:
39:
40:
C:\Users\Harry\Desktop\TaskManager\Demo\MSVC\c_language\Debug\c_language.exe (进程 41888)已退出,返回代码为: 0。
若要在调试停止时自动关闭控制台,请启用“工具”->“选项”->“调试”->“调试停止时自动关闭控制台”。
按任意键关闭此窗口...
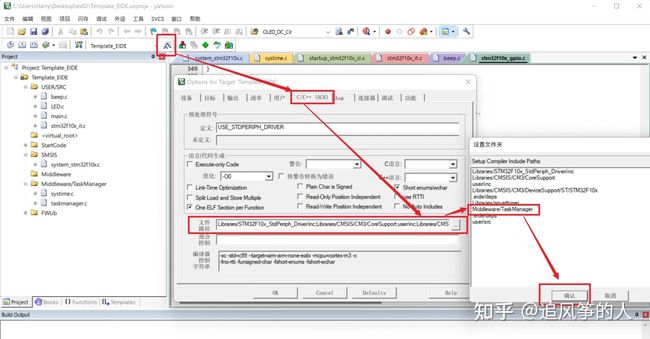
2.2 移植方法
将 TaskManager_c 添加到程序目录下,引用 taskmanager.h , TaskManager_config.h 和 systime.h 并配置时钟即可。
以移植STM32F107为例,说明如下:
Step1:添加项目文件
- 添加c文件到项目目录
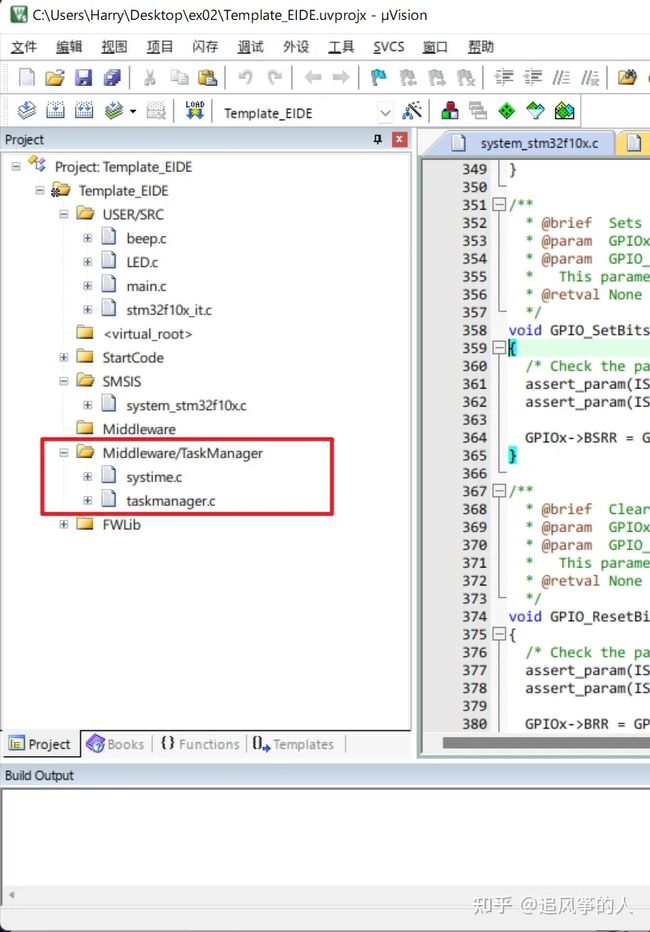
- 添加头文件路径
Step2: 更改系统头文件
进入 TaskManager_config.h ,查看如下代码
// 跨平台移植,处理编译器
#ifdef ARM_KILL // kill编译器
#include "stm32f10x_conf.h"
#endif
将 stm32f10x_conf.h 换成系统相关的文件(标准库)
如果使用HAL库,请根据以下内容自行修改
- 引入 uint32_t ,uint8_t 等数据类型定义
- 系统时钟初始化,根据情况,更改 TM_init() 函数内 SysTick_Config(SYS_CYCLE_TIME * 72000000 / 1000);,完成系统初始化
Step3: 更改滴答计时器的初始化
在 stm32f10x_it.c 中,覆盖原有的 SysTick_Handler 中断服务函数
#include "systime.h"
void SysTick_Handler(void)
{
update_systime();
}
3. 系统原理【有机会重写】

- 任务状态:系统在一个循环时间 SYS_CYCLE_TIME内,根据时间判断任务是否处于就绪状态 判断依据:每个任务都有一个【下次开始时间】的属性,判断该值是否等于系统现在的时间
for (uint32_t PID=0; PIDstart_time == systime)
{
; // 执行相应任务
}
}
- 任务执行:系统在一个循环时间 SYS_CYCLE_TIME内,执行完所有就绪任务,并更新所有任务下次执行的时间 所以,循环时间不能太小,否则系统溢出造成未知错误
- 其他:在一个循环时间内,如果所有任务执行完,还有额外的时间,系统空转。
4. 碎碎念
4.1 TODO
欢迎大家一起完成!
- 提供STM32标准库版本
- 提供 HAL 库版本
- 完成c++版本程序
- 支持带形参的任务
- 为更多平台提供移植 demo
4.2 联系我
开源地址:GitHub - sunshineharry/TaskManager: A cross-platform(STM32, MCS51, WIN, et al.) multitasking management system based on cycle time. 基于循环时间的跨平台多任务管理系统(可用于MCS51,STM32等单片机)
备份:Harry/TaskManager