IRS(intelligent reflecting surface)智能反射面与无人机通信
文章目录
- 前言
- 一、IRS
-
- 1.什么是IRS
- 2. IRS几种应用场景
-
- 场景1:建立新链路
- 场景2:消除干扰
- 场景3:安全通信
- 二、论文
-
- 1.场景
- 2.系统模型
-
- 坐标
- 信道模型
- 3.问题建模
-
- 数据率
- 问题建模
- 问题解决
前言
原论文地址:
论文:Exploring Sum Rate Maximization in UAV-based Multi-IRS Networks: IRS Association, UAV Altitude, and Phase Shift Design
DOI:10.1109/TCOMM.2022.3206884
一、IRS
1.什么是IRS
IRS可以通过在平面上集成大量低成本的无源反射元件,智能地重新配置无线传播环境,从而显著提高无线通信网络的性能。
通俗解释:这些无源反射元件可以对入射的信号进行相位、幅度方面的调整,从而达到波束赋形的目的。
想要了解IRS结构和反射模型的可以参考以下两篇博客:
武庆庆老师讲座笔记
IRS综述
2. IRS几种应用场景
IRS的应用场景有很多,这里给出武庆庆教授在这面的一篇综述文章,感兴趣的可以去了解一下:Intelligent Reflecting Surface-Aided Wireless Communications: A Tutorial

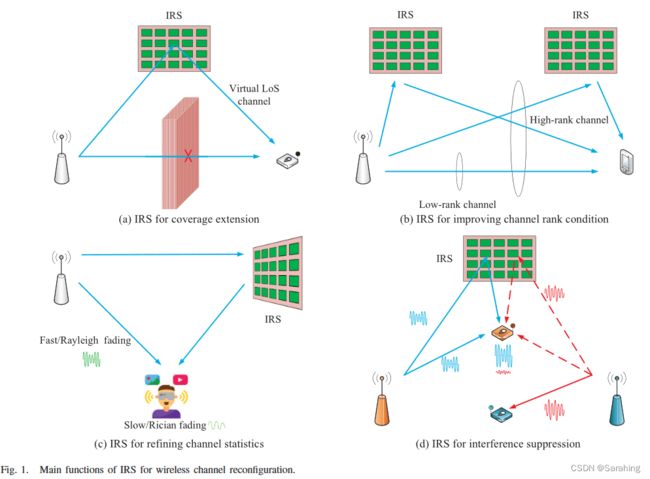
下面只介绍几种较为常见的应用场景:
场景1:建立新链路
在发射端和接收端之间存在阻碍,没有办法直接通信的时候,可以在合适的位置放置IRS面板,通过对发射端信号的调整和反射,在发射端和接收端之间新建立一条LoS链路。这也是本文要介绍的论文的应用场景。
场景2:消除干扰
当接收端处于两个区域的交界处时,它所接收的信号会受到很大的干扰,那么可以通过IRS来增强接收信号的强度降低干扰信号的强度,来增强边缘接收端的信噪比,从而提高网络通信的质量。
场景3:安全通信
在通信环境中存在窃听者的情况下,可以通过IRS调整发射端信号的相位、幅度,使得反射端的信号能量最大程度上指向合法接收端,这样一来可以从物理层面保证了发射端和合法接收端之间的通信安全。当然,如果窃听者的位置确定,也可以尝试通过IRS反射抵消在窃听者方向上的信号能量。有兴趣的可以参考一下这篇文章:Robust Trajectory and Communication Design in IRS-Assisted UAV Communication under Malicious Jamming
二、论文
这里只对该论文的应用场景和模型进行介绍,不详细阐述其解决方法(该论文利用凸优化来解决问题)
1.场景
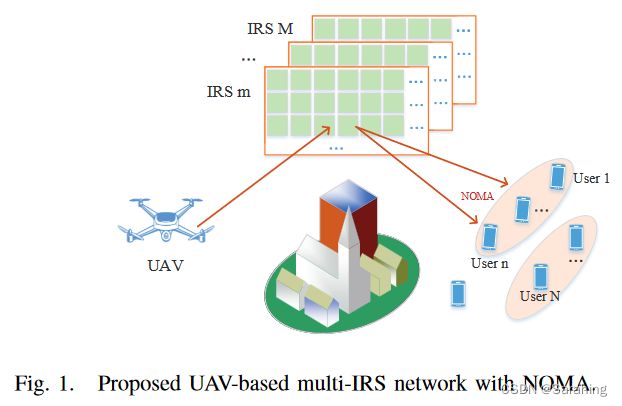
在该论文中,设想了一架无人机,多个IRS面板和多个用户的场景。其中无人机和用户之间存在障碍物,无法进行直接通信,因此需要借助IRS面板来重新建立一条链路,实现无人机和用户之间的通信。
注:该论文不同于大部分论文采用时分或者频分复用,该论文中采用非正交多址接入技术(NOMA),其大致思路是:多个信号走一条路,然后多个接收端自己去解析,找到属于自己的那个信号,这样可以大大提高频带的利用率。具体的实现细节可以参考非正交多址复用技术
2.系统模型
坐标
1.无人机:

2.第m个IRS:
![]()
3.第n个用户:
![]()
4.IRS面板反射系数
![]()
其中,diag指的是对角矩阵,θm,k表示的是第m个IRS第k个反射元的反射系数。
信道模型
- UAV-IRS

在该论文中对所有信道的描述都利用了Rician model,因为信号在经过IRS反射之后可能会出现多径效应。
其中,

表示无人机和IRS之间的距离;

表示LoS部分系数,其中乘号前面可以看成是对无人机到IRS之间的距离所导致的相移的矫正,乘号后面可以看成是对IRS元件所组成的天线阵列之间的间隔所导致的相移的矫正。Pm表示入射角度。K表示IRS面板反射元的个数。LoS系数这个部分和天线阵列波束成形很相似,感兴趣的可以去b站上面找相关的视频了解一下。
- IRS-User
IRS-User信道模型和UAV-IRS同理,就不再多做阐述了:



3.问题建模
数据率
这篇论文的目的在于解决在上述场景下获得最大的总数据率,因此我们先给出数据率的公式:
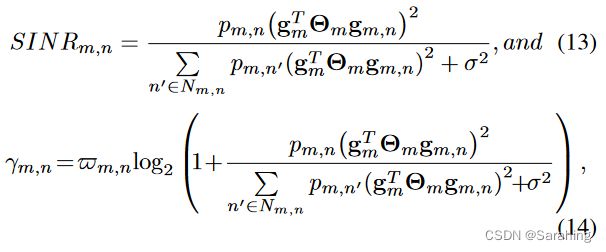
其中SINR(m,n)表示的是第m个IRS和第n个User之间的信噪比。其中分子表示的第n个用户是受到的信号,分母表示的是噪声,至于分母的前半部分是由于在模型用到的是NOMA技术,所以难免会有其他的用户和该用户走同一条通道,那么这些用户相对于该用户而言也相当于是噪声。
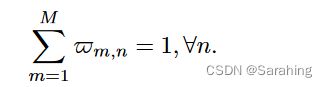
公式(14)r(m,n)表示的是数据率,其中w(m,n)表示的是第m个IRS面板和第n个User之间的分配关系。在该论文中规定,每个用户只能使用一个IRS面板,每个IRS面板上最多只能反射θ个用户的信号,因此w(m,n)的约束如下:

问题建模
在上面的模块中提到了该论文旨在找到最大总数据率,因此针对该问题,我们可以用如下数据表达式表示:

其中C1-C5都是对该问题的约束,C1-C3是对IRS-User之间的分配关系的约束,C4是对无人机位置的约束(该论文规定无人机水平位置保持不变,只更改垂直位置),C5是对相移的约束。
问题解决
通过问题建模可以看出来上述问题是非凸的,该论文采用了凸优化理论来解决这个问题,这里只大致说一下该论文的解决思路,不做详细阐述,感兴趣的可以阅读原文看下推导过程。

在该论文中,将问题解决划分为了三个部分:IRS-User之间的分配关系、无人机悬停的高度以及IRS反射系数。也就是说该论文通过优化IRS与User之间的分配关系、无人机位置以及IRS反射系数来实现总数据率最大化。
针对这三部分的解决过程感兴趣的去阅读原论文Exploring Sum Rate Maximization in UAV-based Multi-IRS Networks: IRS Association, UAV Altitude, and Phase Shift Design
其大致就是通过一阶泰勒展开、SCA(SCA技术原理)、借助CVX工具等方式将非凸函数变成凸函数求解最优值。