matlab中用simulink仿真六足机器人
文章目录
-
- 1.开篇之言
- 2.simulink中导入.urdf文件
- 3.给模型添加模块
- 4.正/逆运动学的研究
- 5.移植实体模型
- 6.结尾
- 7.彩蛋
-
-
- 机器人工具箱:常用函数
- 机器人工具箱:建立简单机器人模型
- 机器人工具箱:正/逆运动学
- 机器人工具箱:轨迹的规划
-
1.开篇之言
因为六足机器人在simulink中仿真目前告一段落,所以记录一下这个过程,有的介绍并不详细,只是大概记录过程,方便以后回忆使用,仿真还是因为疫情期间无法回校,在家只能进行仿真喽,我想开学,我想开学,我想开学,我想回校,我想回校,我想回校!!!哎,人生苦短,多多熬夜!!!
2.simulink中导入.urdf文件
1.安装插件Simscape
下载地址:https://ww2.mathworks.cn/products/simmechanics/download_smlink_confirmation.html?elqsid=1482376811915&potential_use=Education
(1)下载对应版本,下载好后如下图所示:
(2)打开MATLAB,选择当前文件夹为下载的安装包路径,在命令行窗口输入如下命令:
install_addon(‘smlink.r2018b.win64.zip’)

(3)导入.urdf格式文件
这个文件由于是队友弄的,在此不介绍了,只知道是在Solidwork中搞的,导出这个格式需要在Solidwork中安装一个插件
选择当前文件夹为包含此格式路径,在命令行窗口输入如下命令: smimport(‘xxxxx.urdf’)
导入过程挺慢的,应该大概一分多钟吧,成功导入显示如下:

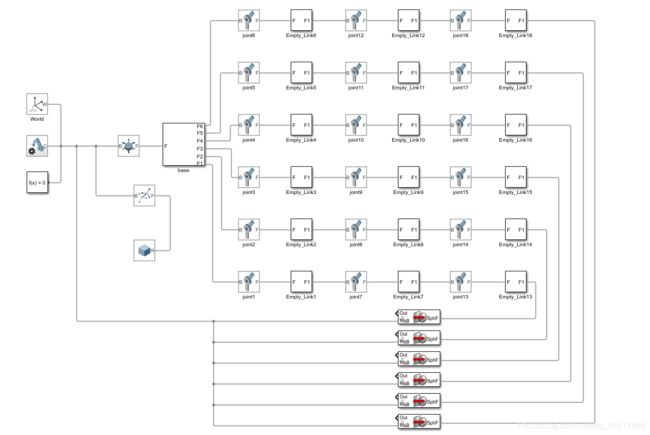
3.给模型添加模块
导入后的模型需要添加 “地面”,“六自由度”,“足尖与地面接触”
添加后的图片如下:
其中“足尖与地面接触”这个模块需要安装一个功能包才能找到:(模块专业名字:Sphere to Plane Force)
如何安装这个功能包呢?如下:
(1)在matlab主页中点附加功能–获取附加功能

(2)在simulink中一列中找到如下功能包:
(3)Simscape-Multibody-Contact-Forces-Library功能包可以直接下载安装,我这出了点问题,我是先下载好(选择相应的版 本),然后设置matlab默认搜索路径,方法如下:
点击 设置路径

再点击 添加并包含子文件夹找到Simscape-Multibody-Contact-Forces-Library的放置路径(最好把下载好的文件放在matlab安装目录下的toolbox文件夹下)
这样就可以再Simulink Library Browser(就是那个四个正方形的图标)里找到Simscape-Multibody-Contact-Forces-Library了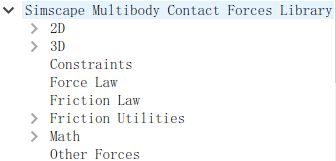
不过要调节Sphere to Plane Force里的参数,可以参考这个模块的帮助文档,这个调参挺悬乎,搞了好久
(4)点击仿真,效果如下:

4.正/逆运动学的研究
(1)我们是现在matlab中简单建立一个三自由度的机械臂来研究逆运动学,这前提需要安装机器人工具箱:
下载地址:http://petercorke.com/wordpress/toolboxes/robotics-toolbox#Downloading_the_Toolbox
下载解压,剪切到matlab安装目录下的toolbox文件夹,打开matlab的设置路径,点击添加子文件夹(同上)
(2)建立机器人模型
下面分享三段代码,队友搞的:
第一段代码(niyundongxue):逆运动学代码,由于我们求逆解是用的几何法,所以只要长度参数改变,都需要改动代码:
function Theta = niyundongxue(A)
L1 = 0.66; % 六足退第一段长度
L2 = 0.94; % 六足退第二段长度
L3 = 1.43; % 六足退第三段长度
x = A(1,4); % 变换矩阵中取x坐标
y = A(2,4); % 变换矩阵中取y坐标
z = A(3,4); % 变换矩阵中取z坐标
if (y==0)
q1 = 0 ;
else
q1 =atan(y/(x-1.16)) ; % q1是第一个舵机转动角度
end
X=x-1.16-L1*cos(q1);
Y= y-L1*sin(q1);
L = ( X^2 + Y^2 + z^2 )^0.5 ;
q2 = acos((L2^2+L^2-L3^2)/(2*L2*L)) + atan(z/(X^2+Y^2)^0.5) ; % q2是第二个舵机转动角度
q3 = -pi+acos((L2^2+L3^2-L^2)/(2*L2*L3)); % q3是第三个舵机转动角度
第二段代码(demo):建立简单模型代码,并验证逆运动学代码的正确性:
L(1)=Link([0 0 1.16 0],'modified'); % D-H参数 建立连杆
L(2)=Link([0 0 0.66 pi/2],'modified'); % D-H参数 建立连杆
L(3)=Link([0 0 0.94 0],'modified'); % D-H参数 建立连杆
L(4)=Link([0 0 1.43 0],'modified'); % D-H参数 建立连杆
Six_Food=SerialLink([L(1),L(2),L(3),L(4)]); % 建立机器人
SixFood.name='Six_Food';
T5=[pi/3 pi/10 -pi/1.5 0]; % 给定角度,先用正运动学
ts = T5*180/pi;
Six_Food.plot(T5); % 画出图像
Six_Food.teach; % 调出控制选型
T6 = Six_Food.fkine(T5); % 正运动学求齐次变换矩阵
T7 = niyundongxue(T6); % 逆运动学求各个关节角度
disp(T6); % 显示齐次变换矩阵
disp(ts); % 显示给定角度的角度制
disp(T5); % 显示给定角度
disp(T7); % 显示逆运动学求出的角度
demo代码运行结果如下:
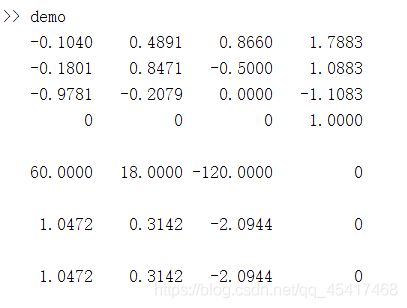
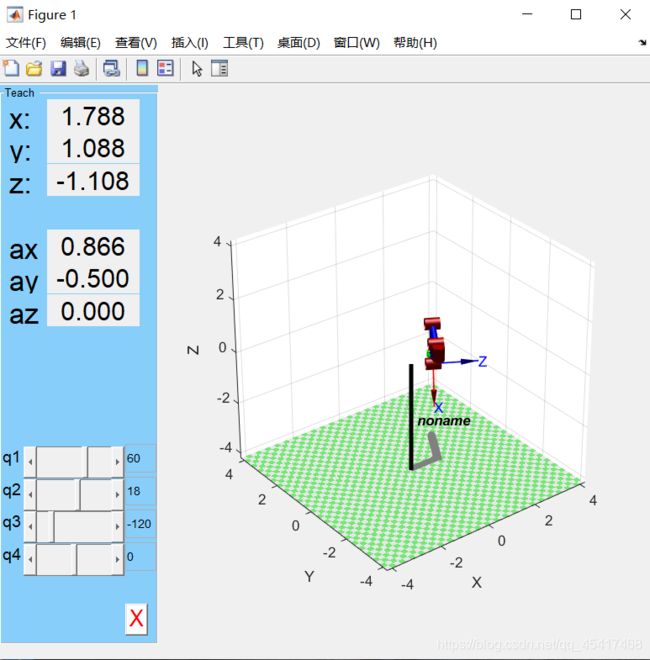
demo代码运行图如下:
然后令A= [-0.1040 0.4891 0.8660 1.7883
-------------- -0.1801 0.8471 -0.5000 1.0883
-------------- -0.9781 -0.2079 0.0000 -1.1083
----------------------- 0 --------- 0 ------- 0 1.0000] ( A等于上面求出来的齐次变换矩阵)
然后运行niyundongxue代码,结果如下:
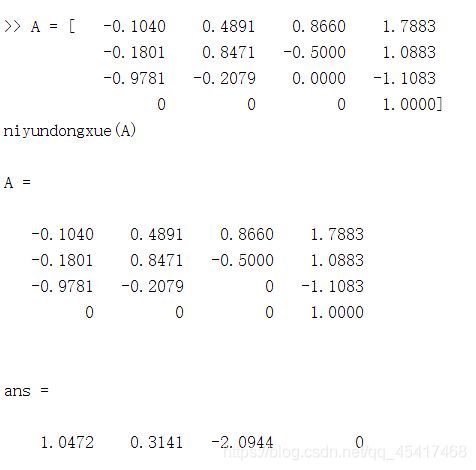
可以证明队友写的逆运动学的正确性!!
第三段代码(Hexapod_Food):可以显示运动轨迹,速度,加速度等等
L(1)=Link([0 0 1.16 0],'modified');
L(2)=Link([0 0 0.66 pi/2],'modified');
L(3)=Link([0 0 0.94 0],'modified');
L(4)=Link([0 0 1.43 0],'modified');
Six_Food=SerialLink([L(1),L(2),L(3),L(4)]);
SixFood.name='Six_Food';
% Six_Food.plot([0 0 -pi/2 0;0 0 0 0]); %画出图像
% Six_Food.teach; %调出控制选型
Six_Food.display();
First_Theta = [pi/3 pi/6 -pi/1.8 0 ];
Final_Theta = [-pi/3 pi/6 -pi/1.8 0] ; % [pi/4 pi/8 -pi/4 0];
step = 666;
[q,qd,qdd] = jtraj(First_Theta,Final_Theta,step);
subplot(2,4,1);
i = 1:4;
plot(q(:,i));
grid on;
title('位置');
subplot(2,4,2);
i = 1:4;
plot(qd(:,i));grid on;
title('速度');
subplot(2,4,5);
i = 1:4;
plot(qdd(:,i));grid on;
title('加速度');
T0 = Six_Food.fkine(First_Theta);
Tf = Six_Food.fkine(Final_Theta);
Tc = ctraj(T0,Tf,step);
Tjtraj = transl(Tc);
subplot(2,4,6);
plot2(Tjtraj,'r');grid on;
title('TO到Tf直线轨迹');
subplot(2,4,[3,4,7,8]);
qq = zeros(4,100);
for Var = 1:666
qq(:,Var) = niyundongxue(Tc(:,:,Var));
end
B = qq';
Six_Food.plot(B);
此代码运行结果如下:(其中运行过程中模型会一点点移动)


5.移植实体模型
最后就是再逆运动学的基础上加一些其他代码来实现每个功能:
下面是大致simulink图:

具体怎么来,各位探索吧,在这不说了!!!!!!
6.结尾
最后以一张图结尾吧
7.彩蛋
由于能力有限,下面写一些自己看的链接:
机器人工具箱:常用函数
链接:https://blog.csdn.net/xuehuafeiwu123/article/details/52787080
机器人工具箱:建立简单机器人模型
链接:https://blog.csdn.net/xuehuafeiwu123/article/details/52549878
机器人工具箱:正/逆运动学
链接:https://blog.csdn.net/xuehuafeiwu123/article/details/52668916
机器人工具箱:轨迹的规划
链接:https://blog.csdn.net/xuehuafeiwu123/article/details/52672892