ARM - UART串口实验(cortex A7核/cortex M4核)
一、总线概念
1.1 什么是总线
1.什么是总线 各个部件之间通信的一种媒介
2.芯片内部总线 芯片内部各个控制器和核之间的通信 SOC---->AHB4---->RCC
3.芯片外部的总线 SOC和芯片外部的各个外设之间的通信 SOC---->IIC---->SI7006 SOC---->SPI---->数码管 SOC---->UART---->TARGET
1.2 串行总线

指同一时刻,只能收发一位数据,串行只有一根数据线
优点:占用的引脚资源少
缺点:传输的速度比较慢
1.3 并行总线
同一时刻可以收发多位数据,有多根数据线
优点:传输的速度比较快
缺点:占用的引脚资源多
1.4 单工/半双工/全双工
1.单工:------->(广播) 要么收,要么发,只可以做发送设备或者接收设备
2.半双工 (对讲机) -------> <------- 可以收,可以发,但是不可以同时进行收发数据
3.全双工(打电话) 可以收,可以发,可以同时进行收发数据
1.5 同步

一般情况下同步通信指的是通信双方根据同步信号进行通信的方式。 比如通信双方有一个共同的时钟信号,大家根据时钟信号的变化进行通信
1.6 异步

指数据传输速度匹配依赖于通信双方有自己独立的时钟源 大家约定好通信的速度。异步通信不需要同步信号,但是并不是说通信的过程不同步
二、串口连接方式
2.1 直连方式
串口一共有三根线:RXD\TXD\GND RXD:接收数据线 TXD:发送数据线 GND:地线

2.2 usb转串口连接方式

SOC---->TTL电平
高电平:----> +5V
低电平:----> 0V 串口电平---->RS232电平
高电平:----> +15V ~ +3V
低电平:----> -15V ~ -3V
2.3 st-link仿真器连接方式

ST-LINK仿真器,完成USB口和串口之间转换 在ST-LINK仿真器内部有一个芯片(STM32F103),这个芯片,完成USB口和串口之间转换 在STM32F103内部固化一段程序,这段程序不开源,这段程序可以USB口和串口之间转换
三、串口通信协议
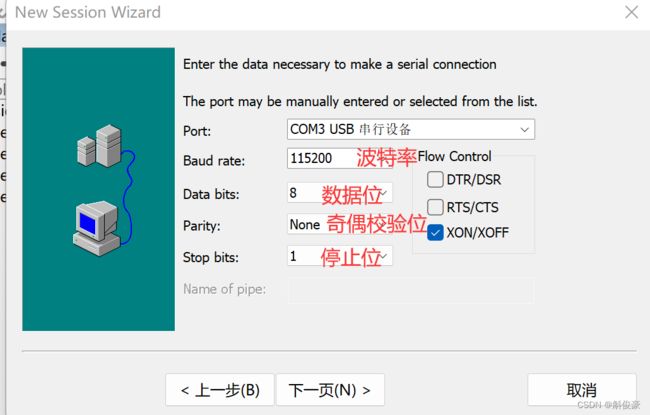
3.1 串口配置信息
1. 串口采用串行通信方式
因为收发数据收发时,一个时钟周期,只能收发一位数据
2. 波特率(bps:比特率,二进制/秒,比特/秒)
串口通信时,传输的速率,1s钟能够收发数据的位数
115200bps:表示1s钟可以收发 115200bit数据
波特率倒数:传输每位所需要的时间
3. 8N1代表的是什么?
8:8位数据位
N:没有奇偶校验位
1:1位停止位
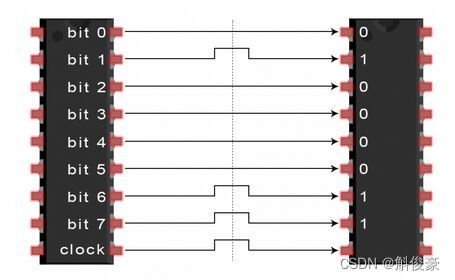
3.2 通信协议

1.空闲态: UART总线不在传输数据的时候,总线处于空闲状态,为高电平
2.起始信号 开始信号,串口通信的开始标志位
3.数据位 串口发送数据,先发低位,再发高位
4.奇/偶校验位:校验数据是否正确
奇校验:数据位和校验位1的个数为奇数 假设数据位0x55(0101 0101),校验位1 假设数据位0x51(0101 0001),校验位0
偶校验:数据位和校验位1的个数为偶数 假设数据位0x55(0101 0101),校验位0 假设数据位0x51(0101 0001),校验位1
5.停止信号:发送数据结束,回到高电平状态,校准时钟信号 一帧数据发送结束后,需要校准时钟信号,为什么需要校准时钟信号呢? 因为串口采用的是异步通信方式,双方都有自己独立的时钟源,虽然设置了双方的时钟源保持一致, 但是在发送数据时,每发送一帧数据时,都会产生误差,越往后,发送的数据,累计误差越大, 所以每发送一帧数据之后,需要校准时钟信
四、分析电路图


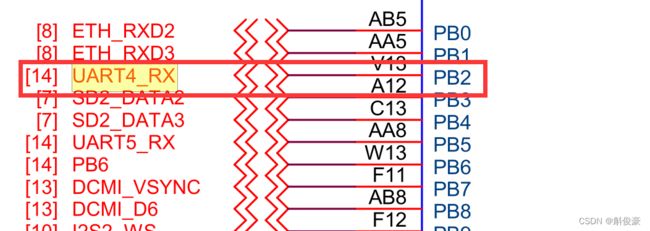
通过分析电路图可知: UART4_RX------>PB2 UART4_TX------>PG11
五、框图分析
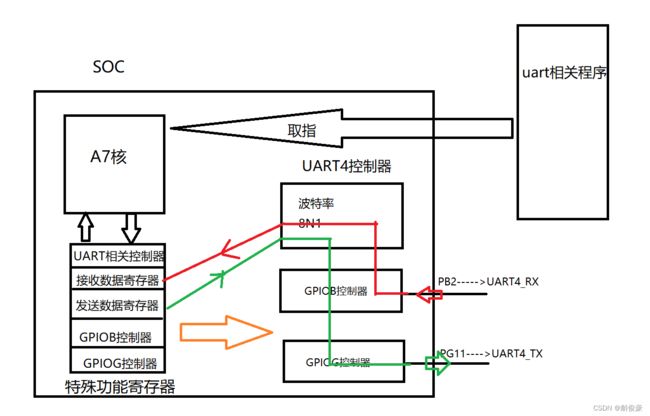
1.通过框图分析可知,分析芯片手册:RCC/GPIO/UART章节
2.分析思路:
1>设置GPIOG/GPIOB引脚为复用功能
2>设置UART4串口初始化
3>实现数据的收发
六、RCC章节分析
6.1 RCC_MP_AHB4ENSETR

1.通过RCC_MP_AHB4ENSETR设置GPIOB和GPIOG控制器使能
2.确定RCC_MP_AHB4ENSETR地址是多少?
地址=基地址+偏移地址=0x50000000 + 0xA28 = 0x500000A28
3.使能GPIOB和GPIOG控制器
RCC_MP_AHB4ENSETR[1] = 1------->使能GPIOB这一组控制器 RCC_MP_AHB4ENSETR[6] = 1------->使能GPIOG这一组控制器
6.2 RCC_MP_APB1ENSETR

1.通过RCC_MP_APB1ENSETR寄存器设置UART4控制器使能
2.确定RCC_MP_APB1ENSETR地址是多少?
地址=基地址+偏移地址=0x50000000 + A00 = 0x50000A00
3.使能UART4控制器
RCC_MP_APB1ENSETR[16] = 1------->使能UART4控制器
七、GPIO章节
7.1 分析GPIOx_MODER寄存器

1.通过GPIOx_MODER寄存器,设置PB2和PG11引脚为复用功能
2.确定GPIOB_MODER和GPIOG_MODER地址
GPIOB地址=基地址+偏移地址=0x50003000 + 0x00 = 0x50003000
GPIOG地址=基地址+偏移地址=0x50008000 + 0x00 = 0x50008000
3.设置PB2和PG11引脚为复用功能
GPIOB_MODER[5:4] = 10 ------->设置PB2引脚为复用功能
GPIOG_MODER[23:22] = 10 ------->设置PG11引脚为复用功能
7.2 分析GPIOx_AFRL寄存器
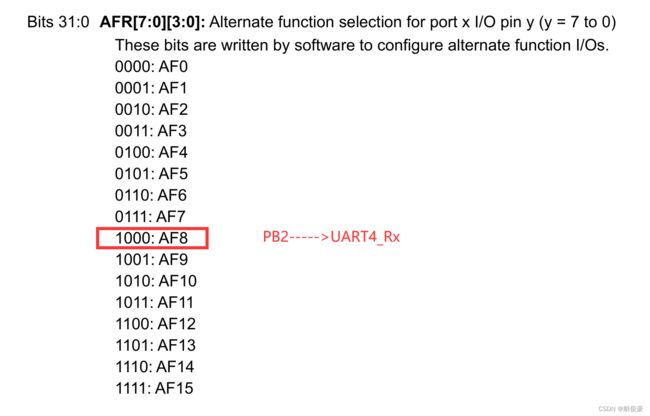

1.思考为什么有两个复用功能寄存器(GPIOx_AFRL和GPIOx_AFRH)?
因为这个寄存器每4位管理一个引脚,一个寄存器最多管理8个引脚
但是GPIO每组一共有16个引脚,所以需要两个这样的寄存器
2.如何确定引脚的复用功能?
要通过stm32mp157a.pdf中table8和table9确定复用功能
7.3 分析GPIOx_AFRH寄存器
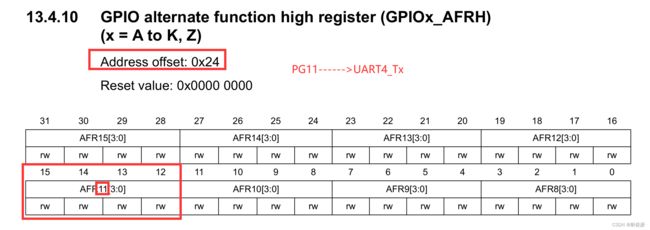

1.通过GPIOG_AFRH寄存器,设置PG11引脚为复用功能UART4_Tx
2.确定GPIOG_AFRH地址
GPIOB地址=基地址+偏移地址=0x50008000 + 0x24 = 0x50008024
3.设置PG11引脚为复用功能UART4_Tx
GPIOG_AFRH[15:12] = 0110 ------->设置PG11引脚为复用功能UART4_Tx
八、UART章节
8.1 UART框图分析


8.2 总结寄存器
通过以上分析可知,设置寄存器:
1.USART_CR1:设置数据位宽度,以及将相应位进行使能
2.USART_CR2:设置停止位
3.USART_BRR:设置波特率---->设置的采样率有关
4.USART_RDR :设置接收数据寄存器
5.USART_TDR :设置发送数据寄存器
6.USART_ISR:设置状态寄存器
7.USART_PRESC :设置时钟分频器
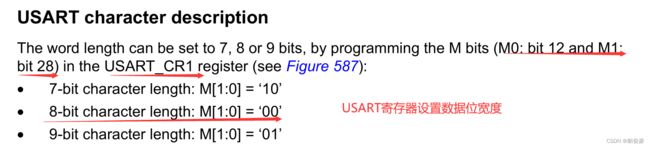
8.3 分析USART_CR1寄存器
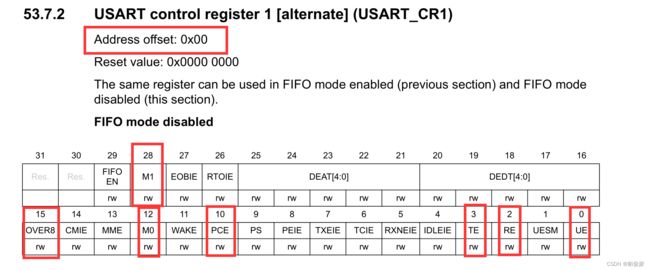
1.确定USART4_CR1寄存器地址
地址 = 基地址 + 偏移地址 = 0x40010000 + 0x00 = 0x40010000
2.通过USART4_CR1寄存器分析可知,需要设置如下位:
USART_CR1[28][12] = 00 ------->设置串口8位数据位
USART_CR1[15] = 0 ------->设置串口16倍采样率,会影响波特率的计算
USART_CR1[10] = 0------->设置串口无奇偶校验位
USART_CR1[3] = 1------->设置串口发送寄存器使能
USART_CR1[2] = 1------->设置串口接收寄存器使能
USART_CR1[0] = 1------->设置串口接收使能






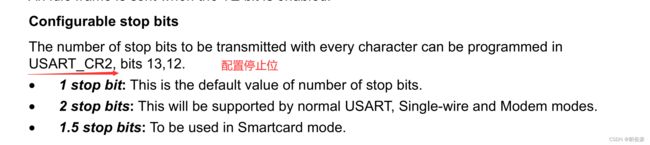
8.4 分析USART_CR2寄存器
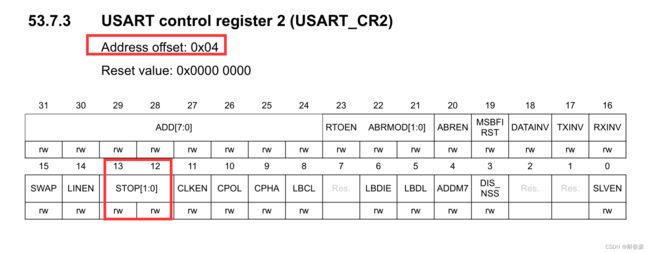

1.确定USART4_CR2寄存器地址
地址 = 基地址 + 偏移地址 = 0x40010000 + 0x04 = 0x40010004
2.通过USART4_CR2寄存器分析可知,需要设置串口1位停止位:
USART_CR2[13:12] = 00 ------->设置串口1位停止位
8.5 分析USART_BRR寄存器


1.确定USART4_BRR寄存器地址
地址 = 基地址 + 偏移地址 = 0x40010000 + 0x0C = 0x4001000C
2.通过USART4_BRR寄存器分析可知,需要设置串口波特率为115200:
3.需要参考芯片手册53.5.7章节,进行计算,波特率寄存器的设置,与采样率有关
设置串口波特率为115200bps,系统提供的串口时钟源:64MHZ
BRR = 64MHZ / 115200 = 0x22b
USART4_BRR = 0x22b ------->设置串口波特率为115200
8.6 分析USART_RDR寄存器

1.确定USART4_RDR寄存器地址
地址 = 基地址 + 偏移地址 = 0x40010000 + 0x24 = 0x40010024
2.接收数据存放在接收数据寄存器中
8.7 分析USART_TDR寄存器
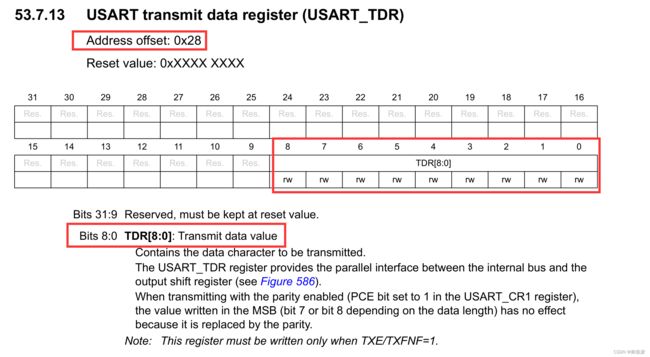
1.确定USART4_RDR寄存器地址
地址 = 基地址 + 偏移地址 = 0x40010000 + 0x28 = 0x40010028
2.发送数据存放在发送数据寄存器中
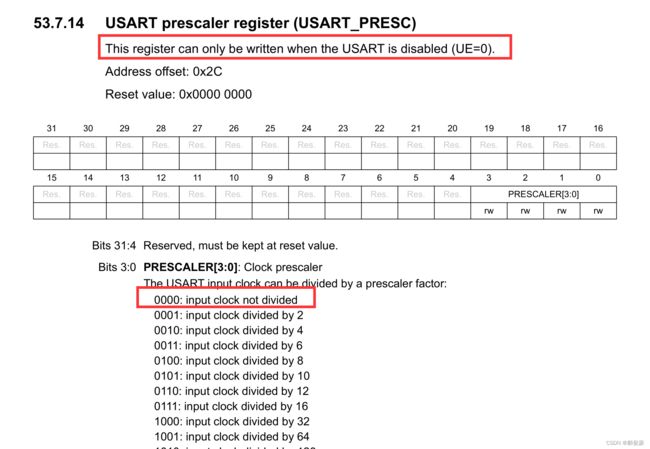
8.8 分析USART_PRESC寄存器
8.9 分析USART_ISR寄存器

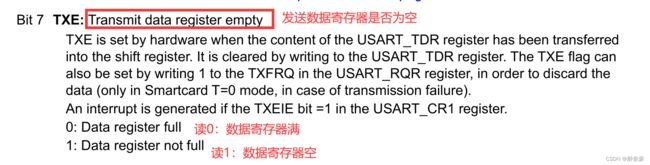
1.USART_ISR[7]:判断发送数据寄存器是否为空,这位只可以读
2.特点:如果发送数据寄存器为空,才可以发送下一个字节的数据,
如果发送数据寄存器为满,则需要等待,发送数据寄存器为空
3. 读0:发送数据寄存器满,需要等待
读1:发送数据寄存器为空,发送下一个字节的数据
4.确定USART4_ISR寄存器地址
地址 = 基地址 + 偏移地址 = 0x40010000 + 0x1C = 0x4001001C
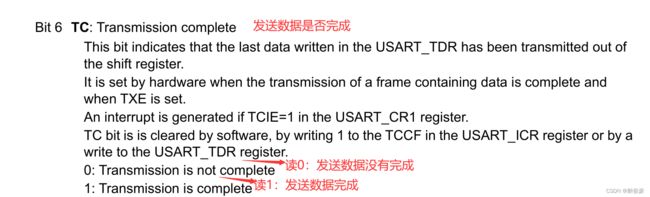
1.USART_ISR[6]:判断一帧数据是否发送完成,这位只可以读
2.特点:如果发送数据完成之后,才可以发送下一帧数据
3. 读0:发送数据没有完成,需要等待
读1:发送数据完成,可以发送下一帧数据
4.确定USART4_ISR寄存器地址
地址 = 基地址 + 偏移地址 = 0x40010000 + 0x1C = 0x4001001C
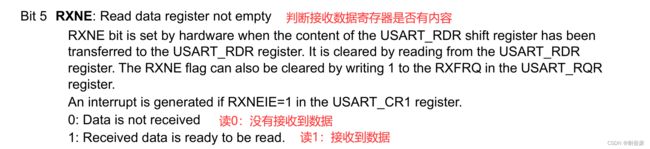
1.USART_ISR[5]:判断接收数据寄存器是否有数据可读,这位只可以读
2.特点:接收数据寄存器有数据,才可以读数据
3. 读0:没有接收到数据,需要等待
读1:接收到数据,可以读这个数据
4.确定USART4_ISR寄存器地址
地址 = 基地址 + 偏移地址 = 0x40010000 + 0x1C = 0x4001001C
代码:
头文件:
#ifndef __UART4_H__
#define __UART4_H__
#include "stm32mp1xx_uart.h"
#include "stm32mp1xx_rcc.h"
#include "stm32mp1xx_gpio.h"
//1.初始化函数
void uart4_init();
//2.发送一个字符
void put_char(const char str);
//3.发送一个字符串
void put_string(const char* str);
//4.接收一个字符
char get_char();
//5.接收一个字符串
char* get_string();
#endif主函数:
#include "uart4.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{
int i,j;
for(i = 0; i < ms;i++)
for (j = 0; j < 1800; j++);
}
int main()
{
//1.调用初始化函数
uart4_init();
//2.发送字符串
put_string("uart4 test!!!!");
while(1)
{
//put_char(get_char()+1);
put_string(get_string());
}
return 0;
}函数体:
#include "uart4.h"
extern void delay_ms(int ms);
//1.初始化函数
void uart4_init()
{
/*******RCC章节初始化******/
//1.使能GPIOB控制器 MP_AHB4ENSETR[1] = 1
RCC->MP_AHB4ENSETR |= (0x1 << 1);
//2.使能GPIOG控制器 MP_AHB4ENSETR[6] = 1
RCC->MP_AHB4ENSETR |= (0x1 << 6);
//3.使能UART4控制器 MP_APB1ENSETR[16] = 1
RCC->MP_APB1ENSETR |= (0x1 << 16);
/*******GPIO章节初始化******/
//PB2---->UART4_Rx
//PG11----->UART4_Tx
//1.设置PB2引脚为复用功能 MODER[5:4] = 10
GPIOB->MODER &= (~(0x3 << 4));
GPIOB->MODER |= (0x1 << 5);
//2.设置PB2引脚复用功能为UART4_Rx AFRL[11:8] = 1000
GPIOB->AFRL &= (~(0xf << 8));
GPIOB->AFRL |= (0x1 << 11);
//3.设置PG11引脚为复用功能 MODER[23:22] = 10
GPIOG->MODER &= (~(0x3 << 22));
GPIOG->MODER |= (0x1 << 23);
//4.设置PG11引脚复用功能为UART4_Tx AFRH[15:12] = 0110
GPIOG->AFRH &= (~(0xf << 12));
GPIOG->AFRH |= (0x3 << 13);
/*******UART章节初始化******/
if(USART4->CR1 & (0x1 << 0))
{
delay_ms(500);
//将UE为禁止 CR1[0] = 0
USART4->CR1 &= (~(0x1 << 0));
}
//1.串口初始化 8位数据位 无奇偶校验位 CR1[28][12]=00 CR1[10]=0
USART4->CR1 &= (~(0x1 << 28));
USART4->CR1 &= (~(0x1 << 12));
USART4->CR1 &= (~(0x1 << 10));
//2.设置串口一位停止位 CR2[13:12] = 00
USART4->CR2 &= (~(0x3 << 12));
//3.设置串口16倍采样率 CR1[15] = 0
USART4->CR1 &= (~(0x1 << 15));
//4.设置串口不分频 PRESC[3:0] = 0000
USART4->PRESC &= (~(0xf << 0));
//5.设置串口波特率115200 BRR = 0x22b
USART4->BRR = 0x22b;
//6.设置串口发送器使能 CR1[3] = 1
USART4->CR1 |= (0x1 << 3);
//7.设置串口接收器使能 CR1[2] = 1
USART4->CR1 |= (0x1 << 2);
//8.设置串口使能 CR1[0] = 1
USART4->CR1 |= (0x1 << 0);
}
//2.发送一个字符
void put_char(const char str)
{
//1.判断发送数据寄存器是否有数据 ISR[7]
//读0:发送数据寄存器满,需要等待
//读1:发送数据寄存器为空,才可以发送下一个字节数据
while(!(USART4->ISR & (0x1 << 7)));
//2.将要发送的字符,写入到发送数据寄存器中
USART4->TDR = str;
//3.判断发送数据是否发送完成
//读0:发送数据没有完成,需要等待
//读1:发送数据完成,可以发送下一帧数据
while(!(USART4->ISR & (0x1 << 6)));
}
//3.发送一个字符串
void put_string(const char* str)
{
//判断是否为'\0'
//一个一个字符的进行发送
while(*str)
{
put_char(*str++);
}
put_char('\n');
put_char('\r');
}
//4.接收一个字符
char get_char()
{
char ch;
//1.判断接收寄存器是否有数据可读 ISR[5]
//读0:没有数据可读,需要等待
//读1:有数据可读
while(!(USART4->ISR & (0x1 << 5)));
//2.将接收数据寄存器中的内容读出来
ch = USART4->RDR;
return ch;
}
char buffer[50] = {0};
//5.接收一个字符串
char* get_string()
{
unsigned int i;
//1.循环进行接收
//2.循环实现:接收一个字符之后,发送一个字符
//当键盘回车建按下之后,代表字符串接收结束'\r'
for(i=0;i<49;i++)
{
buffer[i] = get_char();
put_char(buffer[i]);
if(buffer[i] == '\r')
break;
}
//3.字符串补'\0'
buffer[i] = '\0';
put_char('\n');
return buffer;
}
CORTEX M4核
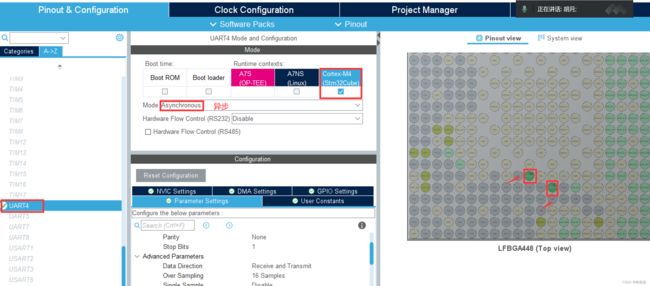
一、配置工程
通过分析电路图可知: UART4_RX------>PB2 UART4_TX------>PG11

二、fputc函数编写
/* USER CODE BEGIN 0 */ int fputc(int ch,FILE* stream) { //判断发送寄存器是否为空 while(!(huart4.Instance->ISR & (0x1 << 7))); //将要发送的数据放入到发送寄存器中 huart4.Instance->TDR = ch; //判断是否为'\n' if(ch == '\n') { //判断发送寄存器是否为空 while(!(huart4.Instance->ISR & (0x1 << 7))); huart4.Instance->TDR = '\r'; } return ch; } /* USER CODE END 0 */
三、main.c编写
四、实验现象