Pytorch学习笔记----DRL
Pytorch--Advanced CNN
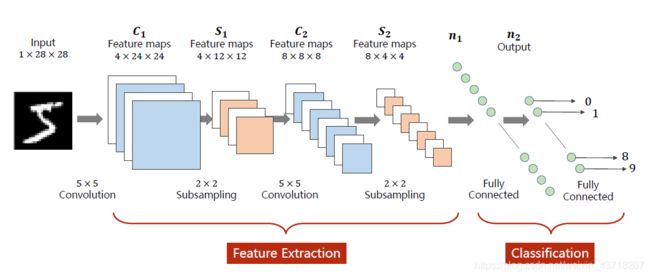
- Convolutional Neural Network
-
- Inception Module
-
- 1X1 convolution
- Implementation of Inception Module
- Deep Residual Learning
- Implementation of simple Residual Network
- Reference
Convolutional Neural Network
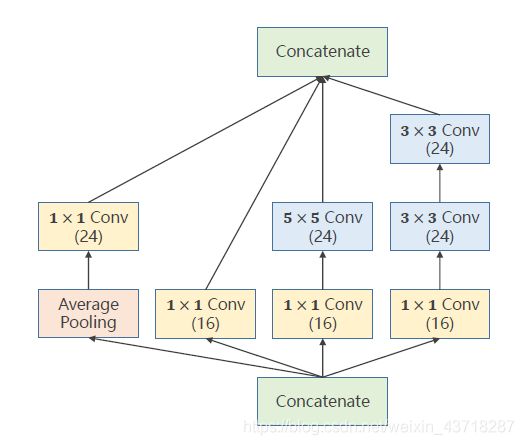
Inception Module
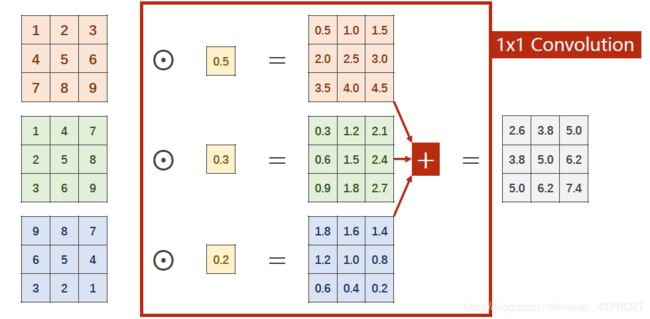
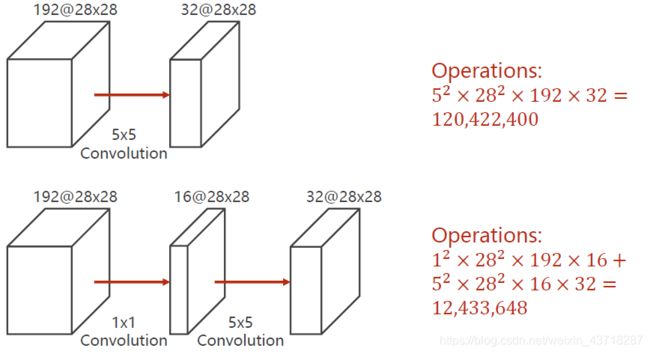
1X1 convolution
1x1卷积核的个数取决于输入张量的通道C个数,1x1卷积可以进行信息融合,改变通道数量
 性能比较:
性能比较:
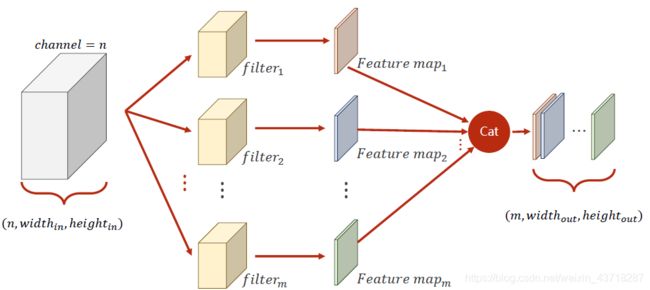
每个张量(b,c,w,h)通过设置padding、stride使得w、h保持不变,通过1x1的卷积来降低计算次数
Implementation of Inception Module
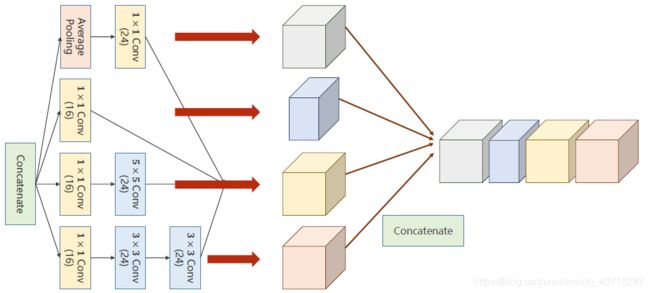
代码实现:
import torch.nn as nn
import torch.nn.functional as F
import torchvision
class InceptionA(nn.Module):
def __init__(self,in_channels):
super(InceptionA, self).__init__()
self.branch1x1=nn.Conv2d(in_channels,16,kernel_size=1)
#kernel_size=5,设置padding=2,使得w,h不变
self.branch5x5_1=nn.Conv2d(in_channels,16,kernel_size=1)
self.branch5x5_2=nn.Conv2d(16,24,kernel_size=5,padding=2,stride=1)
# kernel_size=3,padding=1使得w,h不变
self.branch3x3_1=nn.Conv2d(in_channels,16,kernel_size=1)
self.branch3x3_2=nn.Conv2d(16,24,kernel_size=3,padding=1)
self.branch3x3_3=nn.Conv2d(24,24,kernel_size=3,padding=1)
self.branch_pool=nn.Conv2d(in_channels,24,kernel_size=1)
def forward(self,x):
branch1x1=self.branch1x1(x)
branch5x5=self.branch5x5_1(x)
branch5x5=self.branch5x5_2(branch5x5)
branch3x3=self.branch3x3_1(x)
branch3x3=self.branch3x3_2(branch3x3)
branch3x3=self.branch3x3_3(branch3x3)
branch_pool=F.avg_pool2d(x,kernel_size=3,stride=1,padding=1)
branch_pool=self.branch_pool(branch_pool)
outputs=[branch1x1,branch5x5,branch3x3,branch_pool]
return torch.cat(outputs,dim=1) #(b,c,w,h)沿着channel方向拼接
构建网络结构:
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1=nn.Conv2d(1,10,kernel_size=5)
self.conv2=nn.Conv2d(88,20,kernel_size=5)
self.incep1=InceptionA(in_channels=10)
self.incep2=InceptionA(in_channels=20)
self.mp=nn.MaxPool2d(2) #图像高度和宽度在减小
#定义模块时,可以先不写以下语句,直接输出size()然后根据实际size()再填入全连接层的层数
self.fc=nn.Linear(1408,10) #MINIST数据集88*4*4=1408
def forward(self,x):
in_size=x.size(0)
x=F.relu(self.mp(self.conv1(x))) #输出通道为10
x=self.incep1(x) #输出通道数24+24+24+16=88
x=F.relu(self.mp(self.conv2(x))) #输出通道数为20
x=self.incep2(x) #输出通道为88
# 定义模块时,可以先不写以下语句,直接输出size()然后根据实际size()再填入全连接层的层数
x=x.view(in_size,-1)
x=self.fc(x) #全连接层
return x
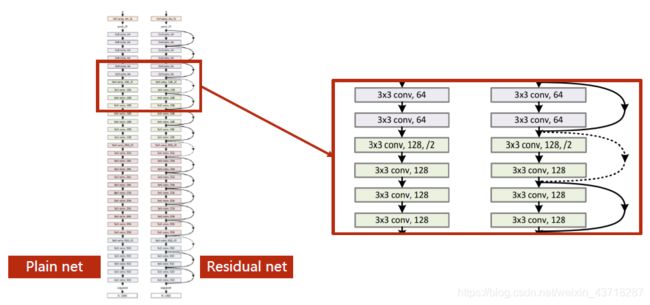
Deep Residual Learning
[解决梯度消失问题-----Residual Net]
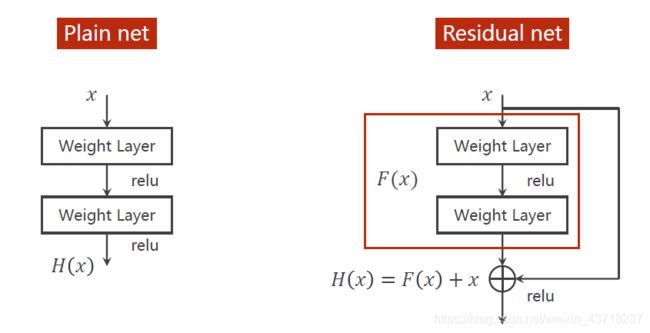 Residual Block 输入张量维度和输出张量维度是一致的
Residual Block 输入张量维度和输出张量维度是一致的
class ResidualBlock(torch.nn.Module):
def __init__(self,channels):
super(ResidualBlock, self).__init__()
self.channels=channels
self.conv1=torch.nn.Conv2d(channels,channels,
kernel_size=3,padding=1)
self.conv2=torch.nn.Conv2d(channels,channels,
kernel_size=3,padding=1)
def forward(self,x):
y=F.relu(self.conv1(x))
y=self.conv2(y)
return F.relu(x+y)
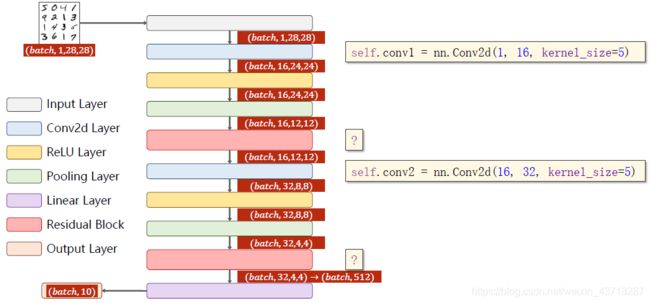
Implementation of simple Residual Network
import torch
import torch.nn.functional as F
class ResidualBlock(torch.nn.Module):
def __init__(self,channels):
super(ResidualBlock, self).__init__()
self.channels=channels
self.conv1=torch.nn.Conv2d(channels,channels,
kernel_size=3,padding=1)
self.conv2=torch.nn.Conv2d(channels,channels,
kernel_size=3,padding=1)
def forward(self,x):
y=F.relu(self.conv1(x))
y=self.conv2(y)
return F.relu(x+y)
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.conv1=torch.nn.Conv2d(1,16,kernel_size=5)
self.conv2=torch.nn.Conv2d(16,32,kernel_size=5)
self.rblock1=ResidualBlock(16)
self.rblock2=ResidualBlock(32)
self.mp=torch.nn.MaxPool2d(2)
self.fc=torch.nn.Linear(512,10)
def forward(self,x):
in_size=x.size(0)
x=self.mp(F.relu(self.conv1(x)))
x=self.rblock1(x)
x==self.mp(F.relu(self.conv2(x)))
x=self.rblock2(x)
x=x.view(in_size,-1)
x=self.fc(x)
return x #使用交叉熵损失函数,最后一步返回不使用激活函数
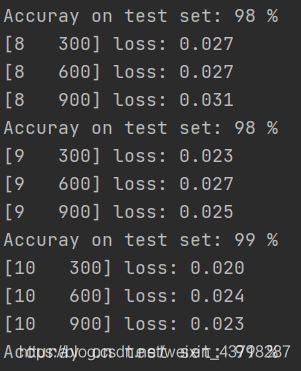
运行结果
Reference
B站河北工业大学刘老师Pytorch框架深度学习