用PaddleDetection做上班摸鱼神器(完整教程)
来源:转载 作者:livingbody
编辑:学姐
还记得小时候爸妈不偷看电视的你吗?
还记得高中时代看小说防着老师的你吗?
还记得上班打游戏防着领导的你吗?
有了这个你将能安心摸鱼
介绍
本文使用PaddleDetection自制数据集,做人脸分类,调用本地电脑的前置摄像头识别出现在屏幕前的人脸,根据不同的人脸切换本地电脑的窗口,实现偷懒神器~
效果
演示项目效果地址:
https://www.bilibili.com/video/BV1ni4y1V7TT
百度推广视频演示地址:
https://www.bilibili.com/video/BV1kC4y1t7s1
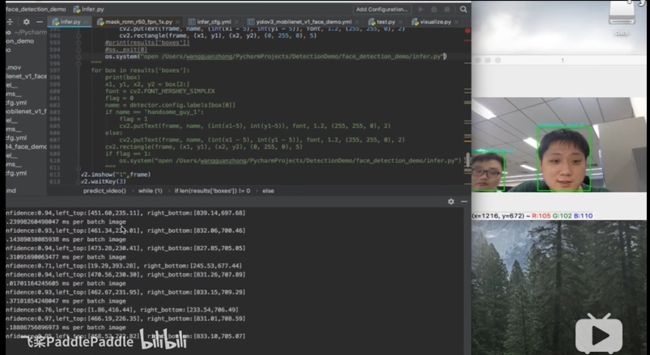
实现的效果截图:

百度推广视频效果图:
PaddleDetection介绍
目标检测是机器视觉领域的核心问题之一。7月3日百度AI开发者大会,飞桨核心框架Paddle Fluid v1.5宣布开源了PaddleDetection物体检测统一框架,用户可以非常方便、快速的搭建出各种检测框架,构建强大的各类应用。
PaddleDetection物体检测统一框架,覆盖主流的检测算法,即具备高精度模型、也具备高速推理模型,并提供丰富的预训练模型,具有工业化、模块化、高性能的优势。
- 工业化:结合飞桨核心框架的高速推理引擎,训练到部署无缝衔接
- 模块化:提供模块化设计,模型网络结构和数据处理均可定制
- 高性能:基于高效的核心框架,训练速度和显存占用上有一定的优势,例如,YOLO v3训练速度相比同类框架快1.6倍。
现有的模型

用PaddleDetection实现本项目
PaddleDetection下载地址:
https://github.com/PaddlePaddle/PaddleDetection
或者
https://gitee.com/paddlepaddle/PaddleDetection
# git下载最新版本
!git clone https://gitee.com/paddlepaddle/PaddleDetection.git --depth=1
Cloning into 'PaddleDetection'...
remote: Enumerating objects: 1870, done.[K
remote: Counting objects: 100% (1870/1870), done.[K
remote: Compressing objects: 100% (1438/1438), done.[K
remote: Total 1870 (delta 617), reused 1061 (delta 368), pack-reused 0[K
Receiving objects: 100% (1870/1870), 175.31 MiB | 15.71 MiB/s, done.
Resolving deltas: 100% (617/617), done.
Checking connectivity... done.
01本地制作数据集
实现本项目,最好用打算实验的相机拍摄数据集,就比如我想在自己的笔记本电脑上实现,那么可以直接调用本地电脑的前置相机来采集人脸照片,调用本地电脑拍照储存代码如会自动调用摄像头,按 S 按键,保存捕获的图像, ESC 退出。
####### 本地运行!!!!!!!!!
import cv2
import os
path = "./pictures/" # 图片保存路径
if not os.path.exists(path):
os.makedirs(path)
cap = cv2.VideoCapture(0)
i = 0
while (1):
ret, frame = cap.read()
k = cv2.waitKey(1)
if k == 27:
break
elif k == ord('s'):
cv2.imwrite(path + str(i) + '.jpg', frame)
print("save" + str(i) + ".jpg")
i += 1
cv2.imshow("capture", frame)
cap.release()
cv2.destroyAllWindows()
02数据标注
上述代码执行完后会在本地这段代码所在路径创建pictures文件夹存放图片,接下来下载labelImg工具进行数据标注参考教程:
[labelImg在Python3 linux环境下安装]
(https://blog.csdn.net/weixin_40745291/article/details/85775708)
~ 安装完成后在本地执行以下命令打开labelImg:
##### 本地执行,不可在aistudio执行!!!!
cd 你的path/labelImg
python labelImg.py
打开图片路径:

选择框选,并给人脸标注名字(这里我用红绿灯的图为例保护隐私):
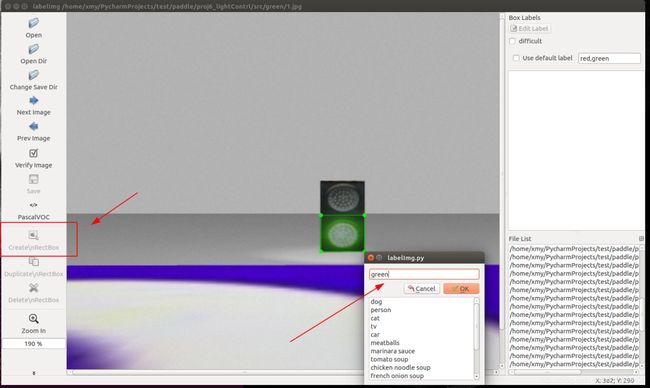
标注完成:
03训练模型
# 解压照片,aistudio上执行
%mkdir -p PaddleDetection/dataset/faces
%mv pictures.zip PaddleDetection/dataset/faces
%cd PaddleDetection/dataset/faces
!unzip pictures.zip
/home/aistudio/PaddleDetection-release-0.3/dataset
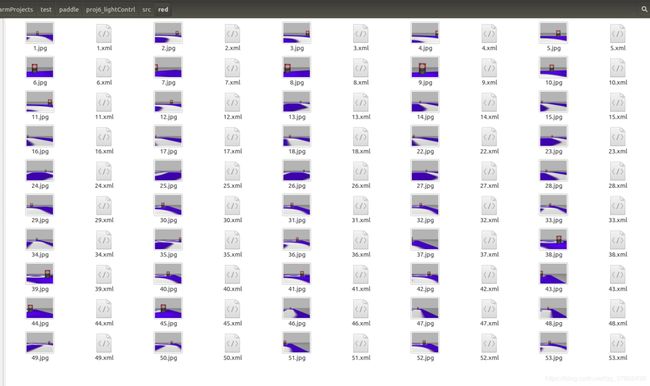
现在的路径应该是这样的:

pictures下放着我们的图片和xml文件。
3.1 生成图片和xmls关系的描述文件
#### 在aistudio上执行
%cd PaddleDetection/dataset/faces
%mkdir xmls
%cd ./pictures/
%mv *.xml ../xmls
# 记录train图片
import os
import random
path = "PaddleDetection/dataset/faces/"
total_red = os.listdir(path + "pictures/")
num = len(total_red)
list=range(num)
ftrain = open('PaddleDetection/dataset/faces/train.txt', 'w')
fval = open('PaddleDetection/dataset/faces/val.txt', 'w')
for i in list:
if i % 9 != 0:
name=total_red[i].split(".")[0]
writeName = "pictures/" + total_red[i] + " xmls/" + name + ".xml\n"
ftrain.write(writeName)
else:
name=total_red[i].split(".")[0]
writeName = "pictures/" + total_red[i] + " xmls/" + name + ".xml\n"
fval.write(writeName)
ftrain.close()
fval.close()
# 记录了label,记得修改label的列表!!!!!
import os
flabel = open('PaddleDetection/dataset/faces/label_list.txt', 'w')
label = ['张三','李四']
for _label in label:
flabel.write(_label + "\n")
flabel.close()
上面两段代码执行完后会生成三个文件:

3.2修改配置文件
修改这个文件:PaddleDetection/configs/ssd/ssd_mobilenet_v1_voc.yml
主要修改就是改动了dataset_dir和anno_path和use_default_label,本项目的ssd_mobilenet_v1_voc.yml文件已经修改了。
内容如下:
#### 只是用来看的,不要运行!!!!!
architecture: SSD
pretrain_weights: https://paddlemodels.bj.bcebos.com/object_detection/ssd_mobilenet_v1_coco_pretrained.tar
use_gpu: true
max_iters: 28000
snapshot_iter: 2000
log_smooth_window: 1
metric: VOC
map_type: 11point
save_dir: output
weights: output/ssd_mobilenet_v1_voc/model_final
# 20(label_class) + 1(background)
num_classes: 21
SSD:
backbone: MobileNet
multi_box_head: MultiBoxHead
output_decoder:
background_label: 0
keep_top_k: 200
nms_eta: 1.0
nms_threshold: 0.45
nms_top_k: 400
score_threshold: 0.01
MobileNet:
norm_decay: 0.
conv_group_scale: 1
conv_learning_rate: 0.1
extra_block_filters: [[256, 512], [128, 256], [128, 256], [64, 128]]
with_extra_blocks: true
MultiBoxHead:
aspect_ratios: [[2.], [2., 3.], [2., 3.], [2., 3.], [2., 3.], [2., 3.]]
base_size: 300
flip: true
max_ratio: 90
max_sizes: [[], 150.0, 195.0, 240.0, 285.0, 300.0]
min_ratio: 20
min_sizes: [60.0, 105.0, 150.0, 195.0, 240.0, 285.0]
offset: 0.5
LearningRate:
schedulers:
- !PiecewiseDecay
milestones: [10000, 15000, 20000, 25000]
values: [0.001, 0.0005, 0.00025, 0.0001, 0.00001]
OptimizerBuilder:
optimizer:
momentum: 0.0
type: RMSPropOptimizer
regularizer:
factor: 0.00005
type: L2
TrainReader:
inputs_def:
image_shape: [3, 300, 300]
fields: ['image', 'gt_bbox', 'gt_class']
dataset:
!VOCDataSet
anno_path: train.txt
dataset_dir: dataset/faces
use_default_label: false
sample_transforms:
- !DecodeImage
to_rgb: true
- !RandomDistort
brightness_lower: 0.875
brightness_upper: 1.125
is_order: true
- !RandomExpand
fill_value: [127.5, 127.5, 127.5]
- !RandomCrop
allow_no_crop: false
- !NormalizeBox {}
- !ResizeImage
interp: 1
target_size: 300
use_cv2: false
- !RandomFlipImage
is_normalized: true
- !Permute {}
- !NormalizeImage
is_scale: false
mean: [127.5, 127.5, 127.5]
std: [127.502231, 127.502231, 127.502231]
batch_size: 32
shuffle: true
drop_last: true
worker_num: 8
bufsize: 16
use_process: true
EvalReader:
inputs_def:
image_shape: [3, 300, 300]
fields: ['image', 'gt_bbox', 'gt_class', 'im_shape', 'im_id', 'is_difficult']
dataset:
!VOCDataSet
anno_path: val.txt
dataset_dir: dataset/faces
use_default_label: false
sample_transforms:
- !DecodeImage
to_rgb: true
- !NormalizeBox {}
- !ResizeImage
interp: 1
target_size: 300
use_cv2: false
- !Permute {}
- !NormalizeImage
is_scale: false
mean: [127.5, 127.5, 127.5]
std: [127.502231, 127.502231, 127.502231]
batch_size: 32
worker_num: 8
bufsize: 16
use_process: false
TestReader:
inputs_def:
image_shape: [3,300,300]
fields: ['image', 'im_id', 'im_shape']
dataset:
!ImageFolder
dataset_dir: dataset/faces
anno_path: label_list.txt
use_default_label: false
sample_transforms:
- !DecodeImage
to_rgb: true
- !ResizeImage
interp: 1
max_size: 0
target_size: 300
use_cv2: false
- !Permute {}
- !NormalizeImage
is_scale: false
mean: [127.5, 127.5, 127.5]
std: [127.502231, 127.502231, 127.502231]
batch_size: 1
开始训练
%cd ~/PaddleDetection/
!pip install -r requirements.txt
#测试项目环境
%cd ~/PaddleDetection/
!export PYTHONPATH=`pwd`:$PYTHONPATH
!python ppdet/modeling/tests/test_architectures.py
#训练模型
%cd ~/PaddleDetection/
# ssd训练
!python -u tools/train.py -c configs/ssd/ssd_mobilenet_v1_voc.yml -o --eval
#转换模型
%cd ~/PaddleDetection/
!python -u tools/export_model.py -c configs/ssd/ssd_mobilenet_v1_voc.yml --output_dir=./inference_model
本地部署
转换模型后,这个路径下:
~/PaddleDetection-release/inference_model/ssd_mobilenet_v1_voc会有__params__ model infer_cfg.yml
三个文件,下载到本地。
本地在python环境下下载PaddleDetection的包,将模型的三个文件放到PaddleDetection目录下的output目录下:

安装工具wmctrl 在linux的终端下执行:
sudo apt-get install wmctrl
修改本地PaddleDetection包中的这个文件:
/PaddleDetection-release-0.3/deploy/python/infer.py
内容如下:
# Copyright (c) 2020 PaddlePaddle Authors. All Rights Reserved.
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
# python -u deploy/python/infer.py --model_dir output/light/mobilnet_best_model
import os
import argparse
import threading
import time
import yaml
import ast
from functools import reduce
from PIL import Image
import cv2
import numpy as np
import paddle.fluid as fluid
from visualize import visualize_box_mask
def decode_image(im_file, im_info):
"""read rgb image
Args:
im_file (str/np.ndarray): path of image/ np.ndarray read by cv2
im_info (dict): info of image
Returns:
im (np.ndarray): processed image (np.ndarray)
im_info (dict): info of processed image
"""
if isinstance(im_file, str):
with open(im_file, 'rb') as f:
im_read = f.read()
data = np.frombuffer(im_read, dtype='uint8')
im = cv2.imdecode(data, 1) # BGR mode, but need RGB mode
im = cv2.cvtColor(im, cv2.COLOR_BGR2RGB)
im_info['origin_shape'] = im.shape[:2]
im_info['resize_shape'] = im.shape[:2]
else:
im = im_file
im_info['origin_shape'] = im.shape[:2]
im_info['resize_shape'] = im.shape[:2]
return im, im_info
class Resize(object):
"""resize image by target_size and max_size
Args:
arch (str): model type
target_size (int): the target size of image
max_size (int): the max size of image
use_cv2 (bool): whether us cv2
image_shape (list): input shape of model
interp (int): method of resize
"""
def __init__(self,
arch,
target_size,
max_size,
use_cv2=True,
image_shape=None,
interp=cv2.INTER_LINEAR):
self.target_size = target_size
self.max_size = max_size
self.image_shape = image_shape,
self.arch = arch
self.use_cv2 = use_cv2
self.interp = interp
self.scale_set = {'RCNN', 'RetinaNet'}
def __call__(self, im, im_info):
"""
Args:
im (np.ndarray): image (np.ndarray)
im_info (dict): info of image
Returns:
im (np.ndarray): processed image (np.ndarray)
im_info (dict): info of processed image
"""
im_channel = im.shape[2]
im_scale_x, im_scale_y = self.generate_scale(im)
if self.use_cv2:
im = cv2.resize(
im,
None,
None,
fx=im_scale_x,
fy=im_scale_y,
interpolation=self.interp)
else:
resize_w = int(im_scale_x * float(im.shape[1]))
resize_h = int(im_scale_y * float(im.shape[0]))
if self.max_size != 0:
raise TypeError(
'If you set max_size to cap the maximum size of image,'
'please set use_cv2 to True to resize the image.')
im = im.astype('uint8')
im = Image.fromarray(im)
im = im.resize((int(resize_w), int(resize_h)), self.interp)
im = np.array(im)
# padding im when image_shape fixed by infer_cfg.yml
if self.max_size != 0 and self.image_shape is not None:
padding_im = np.zeros(
(self.max_size, self.max_size, im_channel), dtype=np.float32)
im_h, im_w = im.shape[:2]
padding_im[:im_h, :im_w, :] = im
im = padding_im
if self.arch in self.scale_set:
im_info['scale'] = im_scale_x
im_info['resize_shape'] = im.shape[:2]
return im, im_info
def generate_scale(self, im):
"""
Args:
im (np.ndarray): image (np.ndarray)
Returns:
im_scale_x: the resize ratio of X
im_scale_y: the resize ratio of Y
"""
origin_shape = im.shape[:2]
im_c = im.shape[2]
if self.max_size != 0 and self.arch in self.scale_set:
im_size_min = np.min(origin_shape[0:2])
im_size_max = np.max(origin_shape[0:2])
im_scale = float(self.target_size) / float(im_size_min)
if np.round(im_scale * im_size_max) > self.max_size:
im_scale = float(self.max_size) / float(im_size_max)
im_scale_x = im_scale
im_scale_y = im_scale
else:
im_scale_x = float(self.target_size) / float(origin_shape[1])
im_scale_y = float(self.target_size) / float(origin_shape[0])
return im_scale_x, im_scale_y
class Normalize(object):
"""normalize image
Args:
mean (list): im - mean
std (list): im / std
is_scale (bool): whether need im / 255
is_channel_first (bool): if True: image shape is CHW, else: HWC
"""
def __init__(self, mean, std, is_scale=True, is_channel_first=False):
self.mean = mean
self.std = std
self.is_scale = is_scale
self.is_channel_first = is_channel_first
def __call__(self, im, im_info):
"""
Args:
im (np.ndarray): image (np.ndarray)
im_info (dict): info of image
Returns:
im (np.ndarray): processed image (np.ndarray)
im_info (dict): info of processed image
"""
im = im.astype(np.float32, copy=False)
if self.is_channel_first:
mean = np.array(self.mean)[:, np.newaxis, np.newaxis]
std = np.array(self.std)[:, np.newaxis, np.newaxis]
else:
mean = np.array(self.mean)[np.newaxis, np.newaxis, :]
std = np.array(self.std)[np.newaxis, np.newaxis, :]
if self.is_scale:
im = im / 255.0
im -= mean
im /= std
return im, im_info
class Permute(object):
"""permute image
Args:
to_bgr (bool): whether convert RGB to BGR
channel_first (bool): whether convert HWC to CHW
"""
def __init__(self, to_bgr=False, channel_first=True):
self.to_bgr = to_bgr
self.channel_first = channel_first
def __call__(self, im, im_info):
"""
Args:
im (np.ndarray): image (np.ndarray)
im_info (dict): info of image
Returns:
im (np.ndarray): processed image (np.ndarray)
im_info (dict): info of processed image
"""
if self.channel_first:
im = im.transpose((2, 0, 1)).copy()
if self.to_bgr:
im = im[[2, 1, 0], :, :]
return im, im_info
class PadStride(object):
""" padding image for model with FPN
Args:
stride (bool): model with FPN need image shape % stride == 0
"""
def __init__(self, stride=0):
self.coarsest_stride = stride
def __call__(self, im, im_info):
"""
Args:
im (np.ndarray): image (np.ndarray)
im_info (dict): info of image
Returns:
im (np.ndarray): processed image (np.ndarray)
im_info (dict): info of processed image
"""
coarsest_stride = self.coarsest_stride
if coarsest_stride == 0:
return im
im_c, im_h, im_w = im.shape
pad_h = int(np.ceil(float(im_h) / coarsest_stride) * coarsest_stride)
pad_w = int(np.ceil(float(im_w) / coarsest_stride) * coarsest_stride)
padding_im = np.zeros((im_c, pad_h, pad_w), dtype=np.float32)
padding_im[:, :im_h, :im_w] = im
im_info['resize_shape'] = padding_im.shape[1:]
return padding_im, im_info
def create_inputs(im, im_info, model_arch='YOLO'):
"""generate input for different model type
Args:
im (np.ndarray): image (np.ndarray)
im_info (dict): info of image
model_arch (str): model type
Returns:
inputs (dict): input of model
"""
inputs = {}
inputs['image'] = im
origin_shape = list(im_info['origin_shape'])
resize_shape = list(im_info['resize_shape'])
scale = im_info['scale']
if 'YOLO' in model_arch:
im_size = np.array([origin_shape]).astype('int32')
inputs['im_size'] = im_size
elif 'RetinaNet' in model_arch:
im_info = np.array([resize_shape + [scale]]).astype('float32')
inputs['im_info'] = im_info
elif 'RCNN' in model_arch:
im_info = np.array([resize_shape + [scale]]).astype('float32')
im_shape = np.array([origin_shape + [1.]]).astype('float32')
inputs['im_info'] = im_info
inputs['im_shape'] = im_shape
return inputs
class Config():
"""set config of preprocess, postprocess and visualize
Args:
model_dir (str): root path of model.yml
"""
support_models = ['YOLO', 'SSD', 'RetinaNet', 'RCNN', 'Face']
def __init__(self, model_dir):
# parsing Yaml config for Preprocess
deploy_file = os.path.join(model_dir, 'infer_cfg.yml')
with open(deploy_file) as f:
yml_conf = yaml.safe_load(f)
self.check_model(yml_conf)
self.arch = yml_conf['arch']
self.preprocess_infos = yml_conf['Preprocess']
self.use_python_inference = yml_conf['use_python_inference']
self.min_subgraph_size = yml_conf['min_subgraph_size']
self.labels = yml_conf['label_list']
self.mask_resolution = None
if 'mask_resolution' in yml_conf:
self.mask_resolution = yml_conf['mask_resolution']
self.print_config()
def check_model(self, yml_conf):
"""
Raises:
ValueError: loaded model not in supported model type
"""
for support_model in self.support_models:
if support_model in yml_conf['arch']:
return True
raise ValueError(
"Unsupported arch: {}, expect SSD, YOLO, RetinaNet, RCNN and Face".
format(yml_conf['arch']))
def print_config(self):
print('----------- Model Configuration -----------')
print('%s: %s' % ('Model Arch', self.arch))
print('%s: %s' % ('Use Padddle Executor', self.use_python_inference))
print('%s: ' % ('Transform Order'))
for op_info in self.preprocess_infos:
print('--%s: %s' % ('transform op', op_info['type']))
print('--------------------------------------------')
def load_predictor(model_dir,
run_mode='fluid',
batch_size=1,
use_gpu=False,
min_subgraph_size=3):
"""set AnalysisConfig, generate AnalysisPredictor
Args:
model_dir (str): root path of __model__ and __params__
use_gpu (bool): whether use gpu
Returns:
predictor (PaddlePredictor): AnalysisPredictor
Raises:
ValueError: predict by TensorRT need use_gpu == True.
"""
if not use_gpu and not run_mode == 'fluid':
raise ValueError(
"Predict by TensorRT mode: {}, expect use_gpu==True, but use_gpu == {}"
.format(run_mode, use_gpu))
if run_mode == 'trt_int8':
raise ValueError("TensorRT int8 mode is not supported now, "
"please use trt_fp32 or trt_fp16 instead.")
precision_map = {
'trt_int8': fluid.core.AnalysisConfig.Precision.Int8,
'trt_fp32': fluid.core.AnalysisConfig.Precision.Float32,
'trt_fp16': fluid.core.AnalysisConfig.Precision.Half
}
config = fluid.core.AnalysisConfig(
os.path.join(model_dir, '__model__'),
os.path.join(model_dir, '__params__'))
if use_gpu:
# initial GPU memory(M), device ID
config.enable_use_gpu(100, 0)
# optimize graph and fuse op
config.switch_ir_optim(True)
else:
config.disable_gpu()
if run_mode in precision_map.keys():
config.enable_tensorrt_engine(
workspace_size=1 << 10,
max_batch_size=batch_size,
min_subgraph_size=min_subgraph_size,
precision_mode=precision_map[run_mode],
use_static=False,
use_calib_mode=False)
# disable print log when predict
config.disable_glog_info()
# enable shared memory
config.enable_memory_optim()
# disable feed, fetch OP, needed by zero_copy_run
config.switch_use_feed_fetch_ops(False)
predictor = fluid.core.create_paddle_predictor(config)
return predictor
def load_executor(model_dir, use_gpu=False):
if use_gpu:
place = fluid.CUDAPlace(0)
else:
place = fluid.CPUPlace()
exe = fluid.Executor(place)
program, feed_names, fetch_targets = fluid.io.load_inference_model(
dirname=model_dir,
executor=exe,
model_filename='__model__',
params_filename='__params__')
return exe, program, fetch_targets
def visualize(image_file,
results,
labels,
mask_resolution=14,
output_dir='output/'):
# visualize the predict result
im = visualize_box_mask(
image_file, results, labels, mask_resolution=mask_resolution)
img_name = os.path.split(image_file)[-1]
if not os.path.exists(output_dir):
os.makedirs(output_dir)
out_path = os.path.join(output_dir, img_name)
im.save(out_path, quality=95)
print("save result to: " + out_path)
class Detector():
"""
Args:
model_dir (str): root path of __model__, __params__ and infer_cfg.yml
use_gpu (bool): whether use gpu
"""
def __init__(self,
model_dir,
use_gpu=False,
run_mode='fluid',
threshold=0.5):
self.config = Config(model_dir)
if self.config.use_python_inference:
self.executor, self.program, self.fecth_targets = load_executor(
model_dir, use_gpu=use_gpu)
else:
self.predictor = load_predictor(
model_dir,
run_mode=run_mode,
min_subgraph_size=self.config.min_subgraph_size,
use_gpu=use_gpu)
self.preprocess_ops = []
for op_info in self.config.preprocess_infos:
op_type = op_info.pop('type')
if op_type == 'Resize':
op_info['arch'] = self.config.arch
self.preprocess_ops.append(eval(op_type)(**op_info))
def preprocess(self, im):
# process image by preprocess_ops
im_info = {
'scale': 1.,
'origin_shape': None,
'resize_shape': None,
}
im, im_info = decode_image(im, im_info)
for operator in self.preprocess_ops:
im, im_info = operator(im, im_info)
im = np.array((im, )).astype('float32')
inputs = create_inputs(im, im_info, self.config.arch)
return inputs, im_info
def postprocess(self, np_boxes, np_masks, im_info, threshold=0.5):
# postprocess output of predictor
results = {}
if self.config.arch in ['SSD', 'Face']:
w, h = im_info['origin_shape']
np_boxes[:, 2] *= h
np_boxes[:, 3] *= w
np_boxes[:, 4] *= h
np_boxes[:, 5] *= w
expect_boxes = np_boxes[:, 1] > threshold
np_boxes = np_boxes[expect_boxes, :]
for box in np_boxes:
print('class_id:{:d}, confidence:{:.2f},'
'left_top:[{:.2f},{:.2f}],'
' right_bottom:[{:.2f},{:.2f}]'.format(
int(box[0]), box[1], box[2], box[3], box[4], box[5]))
results['boxes'] = np_boxes
if np_masks is not None:
np_masks = np_masks[expect_boxes, :, :, :]
results['masks'] = np_masks
return results
def predict(self, image, threshold=0.5, warmup=0, repeats=1):
'''
Args:
image (str/np.ndarray): path of image/ np.ndarray read by cv2
threshold (float): threshold of predicted box' score
Returns:
results (dict): include 'boxes': np.ndarray: shape:[N,6], N: number of box,
matix element:[class, score, x_min, y_min, x_max, y_max]
MaskRCNN's results include 'masks': np.ndarray:
shape:[N, class_num, mask_resolution, mask_resolution]
'''
inputs, im_info = self.preprocess(image)
np_boxes, np_masks = None, None
if self.config.use_python_inference:
for i in range(warmup):
outs = self.executor.run(self.program,
feed=inputs,
fetch_list=self.fecth_targets,
return_numpy=False)
t1 = time.time()
for i in range(repeats):
outs = self.executor.run(self.program,
feed=inputs,
fetch_list=self.fecth_targets,
return_numpy=False)
t2 = time.time()
ms = (t2 - t1) * 1000.0 / repeats
print("Inference: {} ms per batch image".format(ms))
np_boxes = np.array(outs[0])
if self.config.mask_resolution is not None:
np_masks = np.array(outs[1])
else:
input_names = self.predictor.get_input_names()
for i in range(len(inputs)):
input_tensor = self.predictor.get_input_tensor(input_names[i])
input_tensor.copy_from_cpu(inputs[input_names[i]])
for i in range(warmup):
self.predictor.zero_copy_run()
output_names = self.predictor.get_output_names()
boxes_tensor = self.predictor.get_output_tensor(output_names[0])
np_boxes = boxes_tensor.copy_to_cpu()
if self.config.mask_resolution is not None:
masks_tensor = self.predictor.get_output_tensor(
output_names[1])
np_masks = masks_tensor.copy_to_cpu()
t1 = time.time()
for i in range(repeats):
self.predictor.zero_copy_run()
output_names = self.predictor.get_output_names()
boxes_tensor = self.predictor.get_output_tensor(output_names[0])
np_boxes = boxes_tensor.copy_to_cpu()
if self.config.mask_resolution is not None:
masks_tensor = self.predictor.get_output_tensor(
output_names[1])
np_masks = masks_tensor.copy_to_cpu()
t2 = time.time()
ms = (t2 - t1) * 1000.0 / repeats
print("Inference: {} ms per batch image".format(ms))
if reduce(lambda x, y: x * y, np_boxes.shape) < 6:
print('[WARNNING] No object detected.')
results = {'boxes': np.array([])}
else:
results = self.postprocess(
np_boxes, np_masks, im_info, threshold=threshold)
return results
def predict_image():
detector = Detector(
FLAGS.model_dir, use_gpu=FLAGS.use_gpu, run_mode=FLAGS.run_mode)
if FLAGS.run_benchmark:
detector.predict(
FLAGS.image_file, FLAGS.threshold, warmup=100, repeats=100)
else:
results = detector.predict(FLAGS.image_file, FLAGS.threshold)
visualize(
FLAGS.image_file,
results,
detector.config.labels,
mask_resolution=detector.config.mask_resolution,
output_dir=FLAGS.output_dir)
def predict_video():
detector = Detector(
FLAGS.model_dir, use_gpu=FLAGS.use_gpu, run_mode=FLAGS.run_mode)
capture = cv2.VideoCapture(0)
fps = 30
width = int(capture.get(cv2.CAP_PROP_FRAME_WIDTH))
height = int(capture.get(cv2.CAP_PROP_FRAME_HEIGHT))
fourcc = cv2.VideoWriter_fourcc(*'mp4v')
video_name = os.path.split(FLAGS.video_file)[-1]
if not os.path.exists(FLAGS.output_dir):
os.makedirs(FLAGS.output_dir)
out_path = os.path.join(FLAGS.output_dir, video_name)
writer = cv2.VideoWriter(out_path, fourcc, fps, (width, height))
index = 1
while (1):
ret, frame = capture.read()
if not ret:
break
print('detect frame:%d' % (index))
index += 1
results = detector.predict(frame, FLAGS.threshold)
if len(results['boxes']) != 0:
for box in results['boxes']:
x1, y1, x2, y2 = box[2:]
font = cv2.FONT_HERSHEY_SIMPLEX
flag = 0
# 这里两个人脸的话box[0]的值就是1.0和2.0,如果是三个人就是1.0和2.0和3.0,所以我这里两个人脸我就写了小于1.5来判断是谁
if box[0] < 1.5:
flag = 1
cv2.putText(frame, 'wyj', (int(x1-5), int(y1-5)), font, 1.2, (255, 255, 0), 2)
else:
cv2.putText(frame, 'xmy', (int(x1 - 5), int(y1 - 5)), font, 1.2, (255, 255, 0), 2)
cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 5)
if flag == 1:
os.system("wmctrl -a \"pycharm\"") #检测到妹妹的脸 命令行打开pycharm
cv2.imshow("1",frame)
cv2.waitKey(3)
writer.release()
cv2.destroyAllWindows()
def print_arguments(args):
print('----------- Running Arguments -----------')
for arg, value in sorted(vars(args).items()):
print('%s: %s' % (arg, value))
print('------------------------------------------')
flag = 0
def showImg():
global flag
cap = cv2.VideoCapture(0)
while 1:
ret,frame = cap.read()
#cv2.imshow("cap",frame)
if flag is 0:
cv2.imwrite("temp.jpg",frame)
flag = 1
if cv2.waitKey(100) & 0xff == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
parser = argparse.ArgumentParser(description=__doc__)
parser.add_argument(
"--model_dir",
type=str,
default="",
help=("Directory include:'__model__', '__params__', "
"'infer_cfg.yml', created by tools/export_model.py."),
required=True)
parser.add_argument(
"--image_file", type=str, default='', help="Path of image file.")
parser.add_argument(
"--video_file", type=str, default='', help="Path of video file.")
parser.add_argument(
"--run_mode",
type=str,
default='fluid',
help="mode of running(fluid/trt_fp32/trt_fp16)")
parser.add_argument(
"--use_gpu",
type=ast.literal_eval,
default=False,
help="Whether to predict with GPU.")
parser.add_argument(
"--run_benchmark",
type=ast.literal_eval,
default=False,
help="Whether to predict a image_file repeatedly for benchmark")
parser.add_argument(
"--threshold", type=float, default=0.5, help="Threshold of score.")
parser.add_argument(
"--output_dir",
type=str,
default="output",
help="Directory of output visualization files.")
FLAGS = parser.parse_args()
print_arguments(FLAGS)
if FLAGS.image_file != '' and FLAGS.video_file != '':
assert "Cannot predict image and video at the same time"
if FLAGS.image_file != '':
predict_image()
predict_video()
上面代码的核心代码,根据个人使用一点修改,核心代码在585行,其他不用改动,内容如下:

# 启动识别,本地运行不可以在aistudio运行!!!!!
在pychram中可打开终端,输入:
python -u deploy/python/infer.py --model_dir output/face
总结
PaddleDetection可以帮助我们很好的实现各种目标检测任务,不需要用户写大量的代码,只需要简单的配置
使用PaddleDetection也可以很轻松的实现本地的部署
如果项目有任何问题,欢迎在评论区留言指出
关注下方《学姐带你玩AI》
回复“500”轻松获取AI必读200篇高分论文
码字不易,欢迎大家点赞评论收藏!