SLAB缓存管理之创建使用
注:本文分析基于linux-4.18.0-193.14.2.el8_2内核版本,即CentOS 8.2
1、关于slab
slab本身就是缓存,伙伴系统以页作为管理单位,对小内存块不友好,浪费严重,从而出现slab,将不规则的各个内存块分门别类,进程需要使用时直接在对应slab管理区获取,不用再从伙伴系统中获取和初始化,提高效率的同时也减少内存碎片。针对slab缓存管理的各个结构关系,可参考《SLAB缓存管理各结构关系》,了解了各个结构体之间的关系,对于slab的管理逻辑也就清楚了大半,再来实际看看slab的创建就事半功倍了。
2、创建slab管理结构
只要是有经常申请释放相同大小内存的场景小,都可以创建自己的slab管理区,slab的创建通过kmem_cache_create_usercopy,我们以ext4_inode_cache这个slab管理区为例,
static int __init init_inodecache(void)
{
//创建名为ext4_inode_cache的slab管理区
ext4_inode_cachep = kmem_cache_create_usercopy("ext4_inode_cache",
sizeof(struct ext4_inode_info), 0,
(SLAB_RECLAIM_ACCOUNT|SLAB_MEM_SPREAD|
SLAB_ACCOUNT),
offsetof(struct ext4_inode_info, i_data),
sizeof_field(struct ext4_inode_info, i_data),
init_once);
if (ext4_inode_cachep == NULL)
return -ENOMEM;
return 0;
}
这里ext4_inode_cache就是我们在/proc/slabinfo中看到的slab名称,
[root@localhost ~]# cat /proc/slabinfo | grep "ext4_inode_cache"
ext4_inode_cache 57789 59265 1176 27 8 : tunables 0 0 0 : slabdata 2195 2195 0
kmem_cache_create_usercopy实际创建的是kmem_cache的管理结构,用来统管ext4_inode_cache这个slab管理区,创建这个结构时也会查看是否系统中有可复用的结构,没有才会真正的去系统内存中分配,
struct kmem_cache *
kmem_cache_create_usercopy(const char *name,
unsigned int size, unsigned int align,
slab_flags_t flags,
unsigned int useroffset, unsigned int usersize,
void (*ctor)(void *))
{
struct kmem_cache *s = NULL;
...
if (!usersize)
//尝试复用slab中已经存在的kmem_cache,复用的基本条件是
//创建size与已存在的kmem_cache的size比较接近,且小于等于后者
s = __kmem_cache_alias(name, size, align, flags, ctor);
if (s)
goto out_unlock;
cache_name = kstrdup_const(name, GFP_KERNEL);
if (!cache_name) {
err = -ENOMEM;
goto out_unlock;
}
//没有可复用的,需要新分配一个
s = create_cache(cache_name, size,
calculate_alignment(flags, align, size),
flags, useroffset, usersize, ctor, NULL, NULL);
...
return s;
}
static struct kmem_cache *create_cache(const char *name,
unsigned int object_size, unsigned int align,
slab_flags_t flags, unsigned int useroffset,
unsigned int usersize, void (*ctor)(void *),
struct mem_cgroup *memcg, struct kmem_cache *root_cache)
{
struct kmem_cache *s;
int err;
if (WARN_ON(useroffset + usersize > object_size))
useroffset = usersize = 0;
err = -ENOMEM;
//通过zalloc分配一个kmem_cache
s = kmem_cache_zalloc(kmem_cache, GFP_KERNEL);
if (!s)
goto out;
s->name = name;
s->size = s->object_size = object_size;
s->align = align;
s->ctor = ctor;
s->useroffset = useroffset;
s->usersize = usersize;
err = init_memcg_params(s, root_cache);
if (err)
goto out_free_cache;
//初始化kmem_cache中其他变量
err = __kmem_cache_create(s, flags);
if (err)
goto out_free_cache;
s->refcount = 1;
//系统上所有的slab管理区都挂到slab_caches链表
list_add(&s->list, &slab_caches);
memcg_link_cache(s, memcg);
out:
if (err)
return ERR_PTR(err);
return s;
out_free_cache:
destroy_memcg_params(s);
kmem_cache_free(kmem_cache, s);
goto out;
}
分配kmem_cache结构后,需要做一些初始化,然后将该结构挂载到slab_caches链表,这样系统中所有的slab管理区就形成了一个链表,这个链表上就是/proc/slabinfo中包含的所有slab。
3、创建slab对象
创建kmem_cache结构后,实际需要使用的slab对象并没有分配,需要等到进程实际需要用对象时才会从伙伴系统中分配内存,并初始化为slab对象,挂载到slab管理结构上。
3.1 kmem_cache_alloc
slab对象的分配通过kmem_cache_alloc实现,我们还是以ext4_inode_cache为例,
static struct inode *ext4_alloc_inode(struct super_block *sb)
{
struct ext4_inode_info *ei;
ei = kmem_cache_alloc(ext4_inode_cachep, GFP_NOFS);
...
}
kmem_cache_alloc的第一个入参就是上面步骤中创建的ext4 slab管理区,
kmem_cache_alloc -> slab_alloc -> __do_cache_alloc
kmem_cache_alloc经过一些列的调用走到__do_cache_alloc,进行真正的slab对象分配。
3.2 __do_cache_alloc
主要逻辑:
- 从当前node上获取空闲缓存对象
- 当前node内存不够,到其他node获取空闲slab对象
static __always_inline void *
__do_cache_alloc(struct kmem_cache *cache, gfp_t flags)
{
void *objp;
if (current->mempolicy || cpuset_do_slab_mem_spread()) {
objp = alternate_node_alloc(cache, flags);
if (objp)
goto out;
}
//从当前node上获取空闲缓存对象
objp = ____cache_alloc(cache, flags);
/*
* We may just have run out of memory on the local node.
* ____cache_alloc_node() knows how to locate memory on other nodes
*/
if (!objp)
//当前node内存耗尽,尝试到另一个node上获取空闲对象
objp = ____cache_alloc_node(cache, flags, numa_mem_id());
out:
return objp;
}
3.3 ____cache_alloc
主要逻辑:
- 从本地CPU高速缓存结构中获取对象
- 本地CPU高速缓无可用对象,要从其他地方填充
static inline void *____cache_alloc(struct kmem_cache *cachep, gfp_t flags)
{
void *objp;
struct array_cache *ac;
check_irq_off();
//从本地CPU高速缓存结构中获取对象
ac = cpu_cache_get(cachep);
if (likely(ac->avail)) {
ac->touched = 1;
//如果从本地CPU高速缓存结构中还有可用对象,直接获取并返回
objp = ac->entry[--ac->avail];
STATS_INC_ALLOCHIT(cachep);
goto out;
}
STATS_INC_ALLOCMISS(cachep);
//本地CPU高速缓无可用对象,要填充
objp = cache_alloc_refill(cachep, flags);
/*
* the 'ac' may be updated by cache_alloc_refill(),
* and kmemleak_erase() requires its correct value.
*/
ac = cpu_cache_get(cachep);
out:
/*
* To avoid a false negative, if an object that is in one of the
* per-CPU caches is leaked, we need to make sure kmemleak doesn't
* treat the array pointers as a reference to the object.
*/
if (objp)
kmemleak_erase(&ac->entry[ac->avail]);
return objp;
}
3.4 cache_alloc_refill
主要逻辑:
- 先尝试从node共享缓存中获取空闲slab对象填充到本地CPU缓存
- node共享缓存不行,则尝试从slabs_partial和slabs_free上获取空闲对象填充
- 以上都不行,就只能找上级伙伴系统分配页框,并初始化为slab对象并填充
static void *cache_alloc_refill(struct kmem_cache *cachep, gfp_t flags)
{
int batchcount;
struct kmem_cache_node *n;
struct array_cache *ac, *shared;
int node;
void *list = NULL;
struct page *page;
check_irq_off();
node = numa_mem_id();
ac = cpu_cache_get(cachep);
batchcount = ac->batchcount;
if (!ac->touched && batchcount > BATCHREFILL_LIMIT) {
//touched的值在获取对象时置1,如果为0,说明最近都没有使用,不需要填充太多
batchcount = BATCHREFILL_LIMIT;
}
//获取当前node的kmem_cache_node结构,后面需要检查三个slab链表的状态
n = get_node(cachep, node);
BUG_ON(ac->avail > 0 || !n);
//获取node共享高速缓存
shared = READ_ONCE(n->shared);
//如果当前node上没有可用对象,且(不存在节点共享缓存或者共享缓存被用完)
//这时需要去上一级内存系统,即伙伴系统里获取空闲页面并填充到slab管理结构中
if (!n->free_objects && (!shared || !shared->avail))
goto direct_grow;
spin_lock(&n->list_lock);
shared = READ_ONCE(n->shared);
//如果有node共享缓存,尝试从这里获取空闲对象填充
if (shared && transfer_objects(ac, shared, batchcount)) {
shared->touched = 1;
goto alloc_done;
}
//node共享缓存没戏,换个路径
while (batchcount > 0) {
//尝试从slabs_partial和slabs_free上获取空闲对象
page = get_first_slab(n, false);
if (!page)
goto must_grow;
check_spinlock_acquired(cachep);
batchcount = alloc_block(cachep, ac, page, batchcount);
//调整slab链表,我们刚获取的这个page如果里面的对象用完了就挂到slabs_full
//如果没用完就挂到slabs_partial链表
fixup_slab_list(cachep, n, page, &list);
}
must_grow:
//node上空闲对象更新,减去放到本地CPU缓存的数量
n->free_objects -= ac->avail;
alloc_done:
spin_unlock(&n->list_lock);
fixup_objfreelist_debug(cachep, &list);
direct_grow:
//各种路径都没有空闲对象了,只能找上一级boss——buddy system要资源了
if (unlikely(!ac->avail)) {
/* Check if we can use obj in pfmemalloc slab */
if (sk_memalloc_socks()) {
void *obj = cache_alloc_pfmemalloc(cachep, n, flags);
if (obj)
return obj;
}
//从伙伴系统分配页框,并初始化为slab管理对象
page = cache_grow_begin(cachep, gfp_exact_node(flags), node);
/*
* cache_grow_begin() can reenable interrupts,
* then ac could change.
*/
//再次确定本地CPU缓存是否可用,防止分配页框是其他进程也做了相同操作
ac = cpu_cache_get(cachep);
if (!ac->avail && page)
//填充batchcount个空闲对象回本地CPU缓存中,剩下的才放回结点slab链表上
alloc_block(cachep, ac, page, batchcount);
//做些善后工作,比如把页框挂载到对应的slab链表,以及更新统计信息
cache_grow_end(cachep, page);
if (!ac->avail)
return NULL;
}
ac->touched = 1;
return ac->entry[--ac->avail];
}
3.5 cache_grow_begin
主要逻辑:
- 从伙伴系统获取页框
- 分配空闲对象数组
- 初始化slab对象
static struct page *cache_grow_begin(struct kmem_cache *cachep,
gfp_t flags, int nodeid)
{
void *freelist;
size_t offset;
gfp_t local_flags;
int page_node;
struct kmem_cache_node *n;
struct page *page;
...
//从上级伙伴管理系统上获取一个空闲slab对象,页面数为cachep->gfporder
page = kmem_getpages(cachep, local_flags, nodeid);
if (!page)
goto failed;
page_node = page_to_nid(page);
n = get_node(cachep, page_node);
/* Get colour for the slab, and cal the next value. */
n->colour_next++;
if (n->colour_next >= cachep->colour)
n->colour_next = 0;
offset = n->colour_next;
if (offset >= cachep->colour)
offset = 0;
offset *= cachep->colour_off;
/* Get slab management. */
//分配空闲对象数组
freelist = alloc_slabmgmt(cachep, page, offset,
local_flags & ~GFP_CONSTRAINT_MASK, page_node);
if (OFF_SLAB(cachep) && !freelist)
goto opps1;
slab_map_pages(cachep, page, freelist);
kasan_poison_slab(page);
//初始化slab上的空闲对象,包括空闲对象数组
cache_init_objs(cachep, page);
if (gfpflags_allow_blocking(local_flags))
local_irq_disable();
return page;
opps1:
kmem_freepages(cachep, page);
failed:
if (gfpflags_allow_blocking(local_flags))
local_irq_disable();
return NULL;
}
3.6 alloc_slabmgmt
主要逻辑:
- 针对空闲对象放置在页框外,需要额外引入一个微型kmem_cache,需要分配地址
- 针对空闲对象放置在页框内,则使用页框最后的几个字节作为存放地址
static void *alloc_slabmgmt(struct kmem_cache *cachep,
struct page *page, int colour_off,
gfp_t local_flags, int nodeid)
{
void *freelist;
//获取页面的虚拟地址
void *addr = page_address(page);
//设置首个对象的地址
page->s_mem = addr + colour_off;
page->active = 0;
if (OBJFREELIST_SLAB(cachep))
freelist = NULL;
else if (OFF_SLAB(cachep)) {
//空闲对象索引数组在slab外,则需要从freelist_cache中分配对象
//相当于嵌入了另一个微型的kmem_cache结构
freelist = kmem_cache_alloc_node(cachep->freelist_cache,
local_flags, nodeid);
if (!freelist)
return NULL;
} else {
//如果在slab内部,则使用slab最后的空间来存放空闲对象索引数组
freelist = addr + (PAGE_SIZE << cachep->gfporder) -
cachep->freelist_size;
}
return freelist;
}
3.7 cache_grow_end
主要逻辑:
- 更新各个统计值
- 将新分配得来的slab按照实际使用情况挂载到slabs_free、slabs_full或者slabs_partial链表
static void cache_grow_end(struct kmem_cache *cachep, struct page *page)
{
struct kmem_cache_node *n;
void *list = NULL;
...
spin_lock(&n->list_lock);
//更新当前node上的slab数量
n->total_slabs++;
//如果当前slab所有对象都是空闲,加入slabs_free链表
if (!page->active) {
list_add_tail(&page->slab_list, &n->slabs_free);
n->free_slabs++;
} else
//否则加入slabs_full或者slabs_partial链表
fixup_slab_list(cachep, n, page, &list);
STATS_INC_GROWN(cachep);
//更新当前node上的可用的对象数量
n->free_objects += cachep->num - page->active;
spin_unlock(&n->list_lock);
fixup_objfreelist_debug(cachep, &list);
}
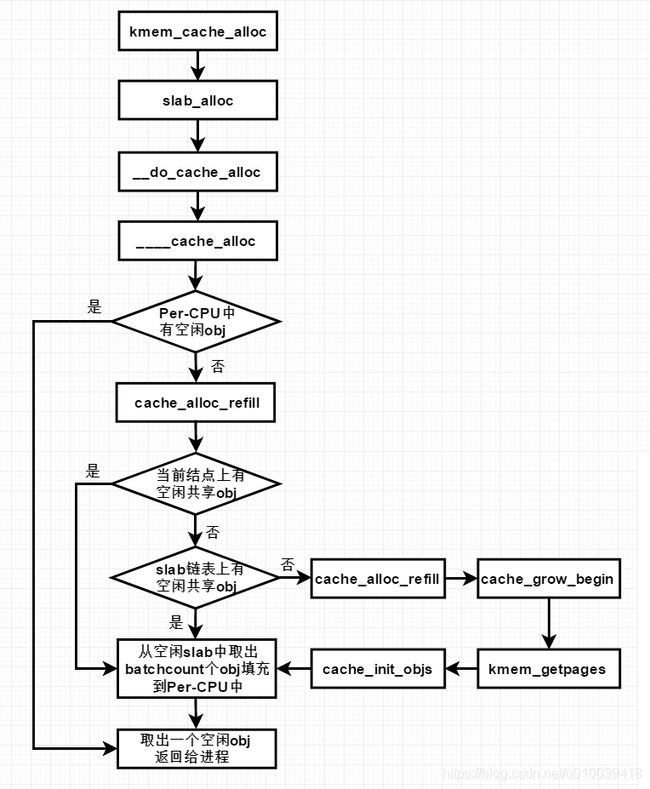
4、slab对象分配流程
整个slab分配流程可以大概用以下流程图描述,总的来说就是有这几级缓存,
- 本地Per-CPU高速缓存
- 当前节点共享slab对象
- slab链表
- 上级伙伴系统
越往后,获取空闲slab对象的代价越大,效率越低,其实和硬件的L1、L2缓存类似。