freeRTOS学习 — 消息队列
1、freeRTOS 的消息队列
freeRTOS中提供了任务之间互相通信的另外的一种手段——消息队列。它的作用主要有:
1)为了在任务与任务之间、任务与中断之间的通信而准备的,可以在任务与任务之间,任务与中断之间传递消息;
2)消息队列可以存储有限的、大小固定的数据项目;
它具有的特点有几个:
1)freeRTOS中的消息队列传递的是一个实际的数据,而不是数据的地址。在RTX、ucos-ii、ucos-iii中的消息队列传递的是消息的地址。
2)消息队列不属于某个特定的任务,任何的任务都可以向队列中发送消息,也可以从队列中提取消息。
3)消息队列所能容纳的最大的数据项目就是队列的长度。
2、freeRTOS的消息队列的管理
2.1、队列的出队方式 & 数据存储
通常的队列都是采取先进先出(FIFO)的存储缓冲机制方式,即往队列中发送消息的时候永远是先发到队列的尾部,而从队列中提取消息的时候是从头部提取的。同时freeRTOS也支持 后进先出(LIFO)的方式。
因为freeRTOS的消息队列传递的是实际的数据,所以数据发送到队列中会导致数据拷贝,会浪费一些时间。但是好处在于一旦消息被拷贝到了消息队列中,那么原始的数据缓冲区或者数据就可以删除或者改变,达到反复利用的效果。
2.2、队列的阻塞
队列阻塞的作用是在当任务从队列中获取消息的时候,所指定的一个等待时间。队列在出队和入队都是可以设置阻塞的。有三种阻塞的时间:
不等待:不等待直接执行之后的内容(为0不等待);
定时等待:任务等待一个固定的时间间隔,可以为 0 ~ portMAX_DELAY;
一直等待:设置为 portMAX_DELAY 的时候,会一直等待。
3、freeRTOS的队列的实现示意
按照freeRTOS官方给出的队列的实现,它的链接如下:
http://www.freertos.org/Embedded-RTOS-Queues.html
官方的队列示意图如下:

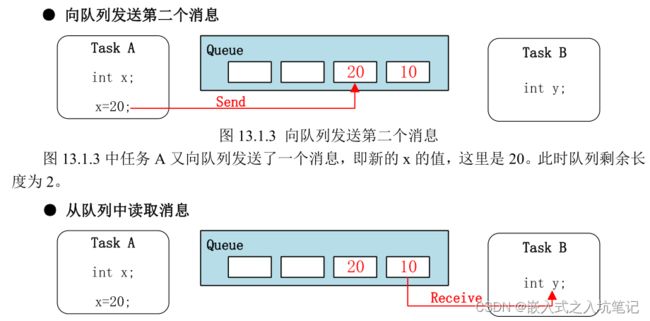

3.1、消息队列的两种通信方式


4、freeRTOS 消息队列实现的API函数:
4.1、创建消息队列
函数原型:
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength, /* 消息个数 */
UBaseType_t uxItemSize ); /* 每个消息大小,单位字节 */
函数描述:
函数 xQueueCreate 用于创建消息队列。
第 1 个参数是消息队列支持的消息个数。即队列长度。
第 2 个参数是每个消息的大小,单位字节。
返回值:如果创建成功会返回消息队列的句柄,失败会返回 NULL。
使用这个函数要注意以下问题:
1)FreeRTOS 的消息传递是数据的复制,而不是传递的数据地址,这点要特别注意。每一次传递都是
uxItemSize 个字节。
2.)uxItemSize:所要发送/接收的消息队列的总字节数。比如要发送10个消息,每个消息占4个字节,所以
uxItemSize = 4(byte) * 10(个) = 40 Byte
4.2、向消息队列中发送消息
1)任务向消息队列发送消息
函数原型:
BaseType_t xQueueSend(
QueueHandle_t xQueue, /* 消息队列句柄 */
const void * pvItemToQueue, /* 要传递数据地址 */
TickType_t xTicksToWait /* 等待消息队列有空间的最大等待时间 */
);
函数描述:
函数 xQueueSend 用于任务中消息发送。
第 1 个参数:是消息队列句柄。
第 2 个参数:要传递的数据地址,每次发送都是将消息队列创建函数 xQueueCreate 所指定的单个消息大
小复制到消息队列空间中。
第 3 个参数:是当消息队列已经满时,等待消息队列有空间时的最大等待时间,单位为系统时钟节拍。
返回值:如果消息成功发送返回 pdTRUE,否则返回errQUEUE_FULL。
使用这个函数要注意以下问题:
1)FreeRTOS 的消息传递是数据的复制,而不是传递的数据地址。
2)此函数是用于任务代码中调用的,故不可以在中断服务程序中调用此函数,中断服务程序中使用的是
xQueueSendFromISR。
3)如果消息队列已经满且第三个参数为 0,那么此函数会立即返回。
4)如果用户将 FreeRTOSConfig.h 文件中的宏定义INCLUDE_vTaskSuspend 配置为 1 且第三个参数配
置为 portMAX_DELAY,那么此发送函数会永久等待直到消息队列有空间可以使用。
5)消息队列还有两个函数 xQueueSendToBack 和 xQueueSendToFront,函数 xQueueSendToBack
实现的是 FIFO 方式的存取,函数 xQueueSendToFront 实现的是 LIFO 方式的读写。一般说的函
数 xQueueSend 等效于 xQueueSendToBack,即实现的是 FIFO 方式的存取。
2)中断中向消息队列发送消息
函数原型:
BaseType_t xQueueSendFromISR
(
QueueHandle_t xQueue, /* 消息队列句柄 */
const void *pvItemToQueue, /* 要传递数据地址 */
BaseType_t *pxHigherPriorityTaskWoken /* 高优先级任务是否被唤醒的状态保存 */
);
函数描述:
函数 xQueueSendFromISR 用于中断服务程序中消息发送。
第 1 个参数:是消息队列句柄。
第 2 个参数:要传递数据地址,每次发送都是将消息队列创建函数 xQueueCreate 所指定的单个消息大
小复制到消息队列空间中。
第3个参数:用于保存是否有高优先级任务准备就绪。如果函数执行完毕后,此参数的数值是pdTRUE,
说明有高优先级任务要执行,否则没有。
返回值:如果消息成功发送返回 pdTRUE,否则返回 errQUEUE_FULL。
使用这个函数要注意以下问题:
1)FreeRTOS 的消息传递是数据的复制,而不是传递的数据地址。正因为这个原因,用户在创建消息队
列时单个消息大小不可太大,因为一定程度上面会增加中断服务程序的执行时间。
2)此函数是用于中断服务程序中调用的,不可以在任务代码中调用此函数,任务代码中使用的是
xQueueSend。
3)消息队列还有两个函数 xQueueSendToBackFromISR 和 xQueueSendToFrontFromISR,函数
xQueueSendToBackFromISR 实现的是 FIFO 方式的存取,函数 xQueueSendToFrontFromISR 实
现的是 LIFO 方式的读写。我们这里说的函数 xQueueSendFromISR 等效于
xQueueSendToBackFromISR,即实现的是 FIFO 方式的存取。
4.3、从消息队列中读取消息
1)任务中读取
函数原型:
BaseType_t xQueueReceive(
QueueHandle_t xQueue, /* 消息队列句柄 */
void *pvBuffer, /* 接收消息队列数据的缓冲地址 */
TickType_t xTicksToWait /* 等待消息队列有数据的最大等待时间 */
);
函数描述:
函数 xQueueReceive 用于接收消息队列中的数据。
第 1 个参数:是消息队列句柄。
第 2 个参数:是从消息队列中复制出数据后所储存的缓冲地址,缓冲区空间要大于等于消息队列创建函
数 xQueueCreate 所指定的单个消息大小,否则取出的数据无法全部存储到缓冲区,从而造成内存溢
出。
第 3 个参数:是消息队列为空时,等待消息队列有数据的最大等待时间,单位系统时钟节拍。
返回值:如果接到到消息返回 pdTRUE,否则返回 pdFALSE。
使用这个函数要注意以下问题:
1)此函数是用于任务代码中调用的,故不可以在中断服务程序中调用此函数,中断服务程序使用的是
xQueueReceiveFromISR 。
2)如果消息队列为空且第三个参数为 0,那么此函数会立即返回。
3)如果将 FreeRTOSConfig.h 文件中的宏定义 INCLUDE_vTaskSuspend 配置为 1 且第三个参数配
置为 portMAX_DELAY,那么此函数会永久等待直到消息队列有数据。
2)中断中读取
BaseType_t xQueueReceiveFromISR( QueueHandle_t xQueue, //消息队列
void * const pvBuffer, //消息的存放位置
BaseType_t * const pxHigherPriorityTaskWoken )
5、队列初始化函数
static void prvInitialiseNewQueue( const UBaseType_t uxQueueLength, //队列长度
const UBaseType_t uxItemSize, //队列项目长度
uint8_t *pucQueueStorage, //队列项目的存储区
const uint8_t ucQueueType, //队列类型
Queue_t *pxNewQueue ) //队列结构
6、队列复位
BaseType_t xQueueGenericReset( QueueHandle_t xQueue, BaseType_t xNewQueue )
消息队列举例:
创建两个任务,一个任务发送三个数据给另外一个任务,另一个任务接收并打印,循环发送,每次发送都对发送的数据增加后发送。代码如下:
1、创建消息队列
QueueHandle_t NewQueue; //消息队列
NewQueue = xQueueCreate(3,sizeof(int)*3); //这一步非常重要,所需字节数 = 每个消息的字节数*队列长度
2、发送消息队列 && 接收消息队列
//task1任务函数
void task1_task(void *pvParameters) //prio = 2
{
u32 recStr[3] = {0};
while(1)
{
xQueueReceive(NewQueue, recStr, 0); //接收消息队列
printf("Tx0 = %d Tx1 = %d Tx2 = %d\r\n",recStr[0],recStr[1],recStr[2]);
LED1 ^= 1;
vTaskDelay(200); //延时n个时钟节拍
}
}
//task2任务函数
void task2_task(void *pvParameters) //prio = 3
{
u32 TxStr[3] = {0};
while(1)
{
xQueueSend(NewQueue, TxStr, portMAX_DELAY); //发送消息队列
TxStr[0] ++;
TxStr[1] += 5;
TxStr[2] += 10;
LED0 ^= 1;
vTaskDelay(500); //延时n个时钟节拍
}
}
对嵌入式技术感兴趣的欢迎关注微信公众号“嵌入式之入坑笔记”,一起学习讨论啊!
