路径规划的二次规划方法-知识总结
路径规划的二次规划方法-知识总结
关于路径规划的优化方法,常见的有二次规划QP,样条二次规划SQP,这里以Apollo的优化方法为例子,作为一个笔记的记录,记录一些个人的问题。
二次规划基础知识
二次规划基础:二次型、正定矩阵、海塞矩阵
【机器学习】二次规划
常用二次规划求解器
OSQP :使用ADMM方法求解。 对于规模大的,含有大量等式或不等式约束的问题有较好的求解效率。
qpOASES: 用可行域法,对于约束较少的小规模问题,qpOASES求解更快。
Apollo参考线平滑方法
采用QP形式进行优化:

这些文章讲得还不错:
自动驾驶之轨迹规划5——Apollo规划中的离散点曲线平滑数学原理
Apollo参考线优化之DiscretePointsReferenceLineSmoother
无人驾驶算法——Baidu Apollo代码解析之ReferenceLine Smoother参考线平滑
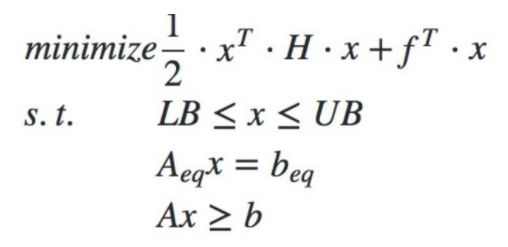
要注意的是,二次规划QP的形式如何去构建,为什么要那样构建:
(1)P矩阵:
这里的P矩阵搭建还是这一篇的描述会比较好:
Apollo参考线优化之DiscretePointsReferenceLineSmoother
例子举例不错,但是这里有些问题:
a. 首先,这里没有将权重变量添加进去:
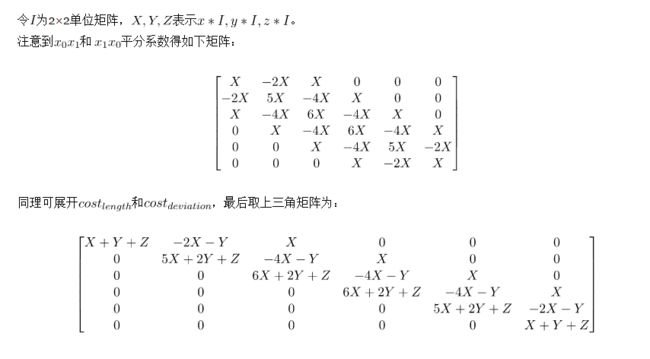
这里的X,Y,Z应该还得乘以每个cost对应的权重变量。另外这里的x,y,z表示的是一个坐标值,而不是一个值,所以I才是2X2单位矩阵。
b. 第二,这里的P为什么只取上三角呢?
值得注意的是,这篇博客它没有取上三角:
无人驾驶算法——Baidu Apollo代码解析之ReferenceLine Smoother参考线平滑
但是从源码和其他博客来说,确实取了上三角:

原因呢?个人见解为:
二次规划问题的P矩阵是一个半正定矩阵,上三角的特征值为对角线元素,只要保证对角线元素大于0,就可以保证特征值都大于0,也即确保P矩阵是正定矩阵,存在全局最优解。
q矩阵的搭建比较简单,注意也要将权重代入:

补充:
正定矩阵是一种实对称矩阵,正定矩阵在实数域上是对称矩阵,这里的数值都是实数,这篇文章:
为什么非零实对称矩阵一定是正定矩阵 证明了实对称矩阵一定是正定矩阵。
二次规划的类别
所谓二次规划问题,就是目标函数为二次函数,约束函数为线性函数的最优化问题。
我目前接触的有三种:二次规划(QP),序列二次规划(SQP),二次规划样条路径优化。二次规划可看前文的参考线平滑例子。
关于序列二次规划,约束为非线性约束,可看介绍:
序列二次规划——SQP
二次规划样条路径优化目标:
例子可看:
技术文档 | 二次规划(QP)样条路径
二次规划(QP)样条路径优化
【规划】Apollo QSQP接口详解
【路径规划】OSQP曲线平滑 公式及代码
apollo qp_speed_optimzer
二次规划(QP)和序列二次规划(SQP):
二次规划(QP)求解与序列二次规划(SQP)求解非线性规划问题
二次规划的求解
当然,上面都是浅浅地了解学习。还得稍微了解一下求解过程。常用的求解器已经列出来:
OSQP :使用ADMM方法求解。 对于规模大的,含有大量等式或不等式约束的问题有较好的求解效率。
qpOASES: 用可行域法,对于约束较少的小规模问题,qpOASES求解更快。
那么有必要简单理解求解过程:
二次规划问题(qp)和序列二次规划问题(sqp)的简单理解
耗时对比:
关于Quadratic Programming(QP)算法和NMPC求解器(SQP)的研究
对自动驾驶中路径规划算法的思考
(附代码)QP求解器对比
Apollo EM Planner和Lattice Planner的对比
(1) 优缺点
从公式来看,Lattice是在已知轨迹的情况下评估,考虑的因素更为具体和全面。而EM是在轨迹未知的情况下求轨迹,考虑的因素更单纯,公式形式更简单。
总体来说,二者的代价函数均是用来解决同一问题的,因此考虑的因素大体一致,轨迹的平滑、避免碰撞、与参考方程(参考线、前步输出、目标速度等guidance)吻合等因素均纳入了考虑。但是,二者的代价函数没有必然联系。
(2)耗时对比
a. 先看EM Planner,求解器是qpOASES。路径和速度的DP过程其实不怎么耗时,大概只需要2ms,耗时主要在QP的构建和求解过程,以及轨迹数据的坐标系转换(从笛卡尔坐标系转为Frenet),代码测试耗时如下(根据移植Apollo3.5版本的EM):
| 过程 | 耗时(ms),有一定误差偏差范围 |
|---|---|
| 路径规划DP | 1.9 |
| 路径规划QP | 56 |
| 笛卡尔坐标系转为Frenet | 50 |
| Frenet 转为笛卡尔坐标系 | 0.08 |
| 速度规划DP | 0.7 |
| 速度规划QP | 2.3 |
| 程序总耗时 | 111 |
这里的路径规划QP 和速度规划QP 为什么会差别这么大呢?因为QP过程包含了求解P,q矩阵,添加约束,调用qpOASES求解器求解等,经过测试每个步骤的耗时,发现,路径规划QP的AddKernel()函数,耗时很多,约52ms,求解过程也只有0.3ms左右,而速度规划QP过程的AddKernel()函数耗时约0.5ms,求解过程耗时约1.7ms。那么问题来了,为什么,路径规划QP的AddKernel()函数的耗时这么多呢?原来是在添加引导线约束那里,多了笛卡尔坐标系转为Frenet 的步骤。。。速度规划的QP不需要进行坐标转换。
这里要说的是,源先的代码写得有的奇怪:我们在路径DP过程的时候,已经是在SL下进行采样,然后为了可以显示DP路径数据,将Frenet 转为笛卡尔坐标系,这里耗时0.08ms,很少,然后获取历史轨迹(引导线),历史轨迹其实已经包含了XY和SL坐标系,添加引导线约束源码是这样:
void QpSplinePathGenerator::AddHistoryPathKernel() {
if (last_discretized_path_ == nullptr) {
return;
}
PathData last_path_data;
last_path_data.SetReferenceLine(&reference_line_);
last_path_data.SetDiscretizedPath(*last_discretized_path_);
std::vector<double> history_s;
std::vector<double> histroy_l;
for (size_t i = 0; i < last_path_data.frenet_frame_path().size(); ++i) {
const auto p = last_path_data.frenet_frame_path().at(i);
history_s.push_back(p.s());
histroy_l.push_back(p.l() - ref_l_);
}
Spline1dKernel* spline_kernel = spline_solver_->mutable_spline_kernel();
spline_kernel->AddReferenceLineKernelMatrix(
history_s, histroy_l, qp_spline_path_config_.history_path_weight());
}
其中,SetDiscretizedPath这个函数耗时约52ms。但是其实我们应该可以换一种写法,可以在构造函数里面就获取历史轨迹的frenet坐标系内容,并赋值给last_frennet_path_:
void QpSplinePathGenerator::AddHistoryPathKernel()
{
if (last_discretized_path_ == nullptr || last_frennet_path_ == nullptr)
{
return;
}
//last_path_data.SetReferenceLine(&reference_line_);
//last_path_data.SetDiscretizedPath(*last_discretized_path_);
std::vector<double> history_s;
std::vector<double> histroy_l;
for (size_t i = 0; i < last_frennet_path_->size(); ++i)
{
const auto p = last_frennet_path_->at(i);
history_s.push_back(p.s);
histroy_l.push_back(p.d - ref_l_);
}
Spline1dKernel *spline_kernel = spline_solver_->mutable_spline_kernel();
spline_kernel->AddReferenceLineKernelMatrix(history_s, histroy_l, Config_.history_path_weight);
}
这样耗时就减半啦,整个过程耗时变成约60ms,而且没有轨迹生成也没有异常。但是,在QpSplinePathGenerator::Generate函数里有一语句: path_data->SetDiscretizedPath(DiscretizedPath(path_points));
它是对优化后的路径进行转化的,就删除不掉,因为还是得有笛卡尔坐标系,合成的时候才能直接转换。所以,最后EM Planner的总耗时为:57.6933ms - 63.3948ms。
b. Lattice Planner可分为采样规划和二次规划,明显采样规划耗时更多。
采样规划的耗时表如下:
| 主要过程 | 耗时(ms),有一定误差偏差范围 |
|---|---|
| 轨迹生成 | 0.512495 - 1.09752 |
| 轨迹筛选(评价+碰撞检测) | 53.8503 - 93.9556 |
| 程序总耗时 | 54 - 95 |
遇到障碍物的时候,评价函数耗时可谓是剧增,这是采样方法的缺点。
二次规划的耗时表如下:
| 主要过程 | 耗时(ms),有一定误差偏差范围 |
|---|---|
| 轨迹生成 | 1.97102- 2.04251 |
| 轨迹筛选(评价+碰撞检测) | 2.12562 - 11.4235 |
| 程序总耗时 | 4 - 14 |
总结
总的来说,路径的优化方法还是比路径的采样方法好,耗时少,但是采样也有采样的优点。每个场景结合不同的规划算法,会比较合适。