第十三届蓝桥杯嵌入式备赛-STM32G431-进阶模块调试⑤IIC调试24C02、MCP4017
目录
0.前言
1.功能要求
电路原理图
2.STM32Cubemx初始化
3.程序实现
main.c相关初始化
24C02
M24CO2_Read读数据
M24CO2_Write写数据
MCP4017
MCP4017_Read读数据
MCP4017_Write写数据
4.工程文件
0.前言
这套教程针对于蓝桥杯嵌入式比赛的底层模块调试,针对于比赛进行每个模块的调试,低层模块调试好,对于赛题的实现就会方便很多,虽然有一些应试教育的意味,不过准备这个比赛对于程序整体实现思维还是有着很大帮助,我也从中受益颇多!
1.功能要求
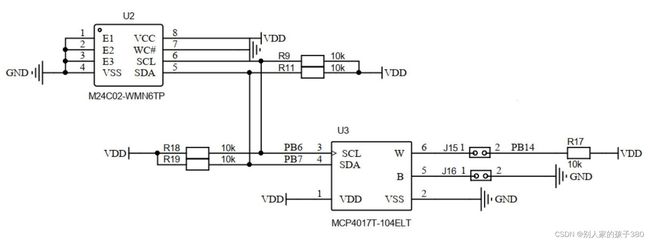
使用官方提供的底层驱动代码i2c_hal.c、i2c_hal.h文件中的函数编写EEPROM:24C02存储器的读写操作以及MCP4017可编程电阻的阻值的写入和读取。(本教程侧重于功能的实现,对原理的讲解较少,请谅解,后续如果有机会会在返回补充)
电路原理图
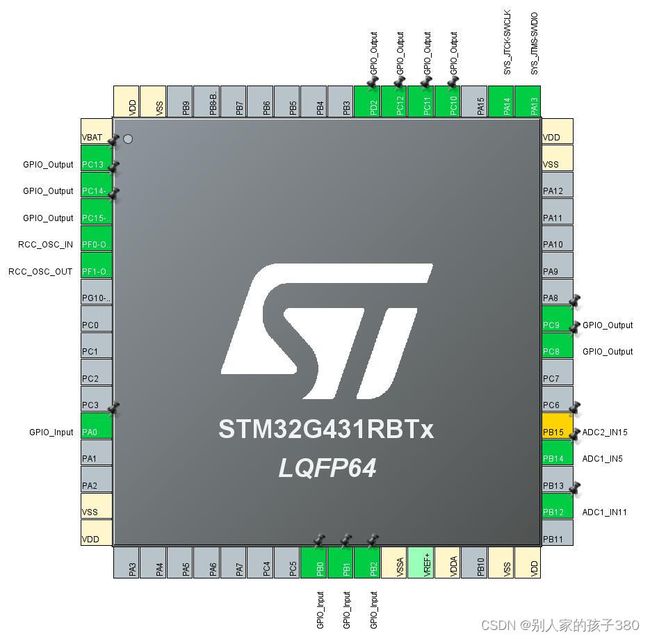
2.STM32Cubemx初始化
与上一讲相同④,无需改动
3.程序实现
首先将赛场提供的底层驱动代码i2c_hal.c、i2c_hal.h添加到自己的工程文件中(本操作为Keil的基本操作,不在赘述),并在main.c中添加头文件
/*main.c*/
#include "i2c_hal.h"main.c相关初始化
main.c中创建MCP相关变量
/*main.c*/
uint16_t MCP_tt=0;//MCP写入计时标志位
uint16_t MCP_Ref=0;//MCP写入标志位
uint16_t MCP_Out=0;//MCP写入的值Task_Time()函数扩充,以执行定时读取ADC值(移步②,查看该函数)
/*main.c*/
void Task_Time(void)
{
if(++Key_tt==10) {Key_tt=0;Key_Ref=1;}//按键扫描计时
if(++Lcd_tt==200) {Lcd_tt=0;Lcd_Ref=1;}//LCD刷新计时
if(++ADC_tt==300) {ADC_tt=0;ADC_Ref=1;}//ADC读取计时
if(++MCP_tt==200) {MCP_tt=0;MCP_Ref=1;}//MCP写入计时
}主循环中添加判断程序(MCP4017_Write(uint16_t info)之后会讲到)
/*main.c*/
while (1)
{
if(MCP_Ref==1)
{
MCP_Ref=0;//清除标志位
MCP4017_Write(MCP_Out);
}
}对IIC进行初始化(主循环之前)
/*main.c*/
I2CInit();24C02
在i2c_hal.c中编写以下函数,并在i2c_hal.h中声明(详细函数解释在注释中)
/*i2c_hal.h*/
uint16_t M24CO2_Read(uint16_t address);
void M24CO2_Write(uint16_t address,uint16_t info);
uint16_t MCP4017_Read(void);
void MCP4017_Write(uint16_t info);M24CO2_Read读数据
该函数实现对M24C02的地址address位置内存值的读取
/*i2c_hal.c*/
uint16_t M24CO2_Read(uint16_t address)
{
uint16_t val;
I2CStart();//开启IIC
I2CSendByte(0xa0);//发送写数据信号
I2CWaitAck();//等待响应
I2CSendByte(address);//发送地址
I2CWaitAck();
I2CStop();//停止IIC
I2CStart();
I2CSendByte(0xa1);//发送读数据信号
I2CWaitAck();
val=I2CReceiveByte();//读取数据
I2CStop();
return val;
}M24CO2_Write写数据
该函数实现对M24C02的地址address位置内存值的写入,写入值为info
/*i2c_hal.c*/
void M24CO2_Write(uint16_t address,uint16_t info)
{
I2CStart();//开启IIC
I2CSendByte(0xa0);//发送写数据信号
I2CWaitAck();//等待响应
I2CSendByte(address);//发送地址
I2CWaitAck();
I2CSendByte(info);//发送要写的数据
I2CWaitAck();
I2CStop();//停止IIC
}MCP4017
在i2c_hal.c中编写以下函数,并在i2c_hal.h中声明
MCP4017_Read读数据
读取此时MCP4017的值
/*i2c_hal.c*/
uint16_t MCP4017_Read(void)
{
uint16_t val;
I2CStart();//开启IIC
I2CSendByte(0x5f);//发送读数据信号
I2CWaitAck();//等待响应
val=I2CReceiveByte();//读取数据
I2CStop();//停止IIC
return val;
}MCP4017_Write写数据
写入MCP4017的值
/*i2c_hal.c*/
void MCP4017_Write(uint16_t info)
{
I2CStart();//开启IIC
I2CSendByte(0x5e);//发送写数据信号
I2CWaitAck();//等待响应
I2CSendByte(info);//发送要写的数据
I2CWaitAck();
I2CStop();//停止IIC
}注:以上调用的函数均定义在文件i2c_hal.c、i2c_hal.h中
/*i2c_hal.h*/
void I2CStart(void);
void I2CStop(void);
unsigned char I2CWaitAck(void);
void I2CSendByte(unsigned char cSendByte);
unsigned char I2CReceiveByte(void);
void I2CInit(void);在Task.c中声明外部变量,即可改变MCP4017电阻值了
/*Task.c*/
extern uint16_t MCP_Out;//MCP写入的值4.工程文件
该工程文件为全10讲所有内容,可以作为参考,不过还是希望读者能够自己手敲一遍,加深记忆
链接:https://pan.baidu.com/s/1LcNszc7_oHWvXcucCezlxg?pwd=hw07
提取码:hw07
自己做的笔记,也希望能对你有帮助!