STM32——ADC采集
目录
ADC简介
ADC主要特征
ADC功能框图
ADC引脚
电压输入范围
通道选择
单次转换模式
连续转换模式
转换顺序
规则序列
注入序列
触发源
转换时间
中断
转换结束中断
模拟看门狗中断
DMA请求
代码讲解
宏定义:
ADC简介
12位ADC是一种逐次逼近型模拟数字转换器,它有多达18个通道,可以测量16个外部和2个内部信号源。各通道的A/D转换可以单次、连续、扫描或间断模式执行.ADC的结果可以是左对齐或者是右对齐方式存储在16位数据寄存器中。
模拟看门狗特性允许应用程序检测输入电压是否超出用户定义的高/低阈值。
ADC的输入时钟不得超过14MHZ,它是由PCLK2经分频产生。
ADC主要特征
- 12位分辨率
- 转换结束、注入转换结束和发生模拟看门狗事件时产生中断
- 单次和连续转换模式
- 从通道0到通道n的自动扫描模式
- 自校准
- 带内嵌数据一致性的数据对齐
- 采样间隔时间可以按通道分别编程
- 规则转换和注入转换均有外部触发选项
- 间断模式
- 双重模式(带2个或以上ADC的器件)
- ADC转换时间
- ADC供电要求:2.4V到3.6v
- ADC输入范围:Vref-
- 规则通道转换期间有DMA请求产生
ADC功能框图
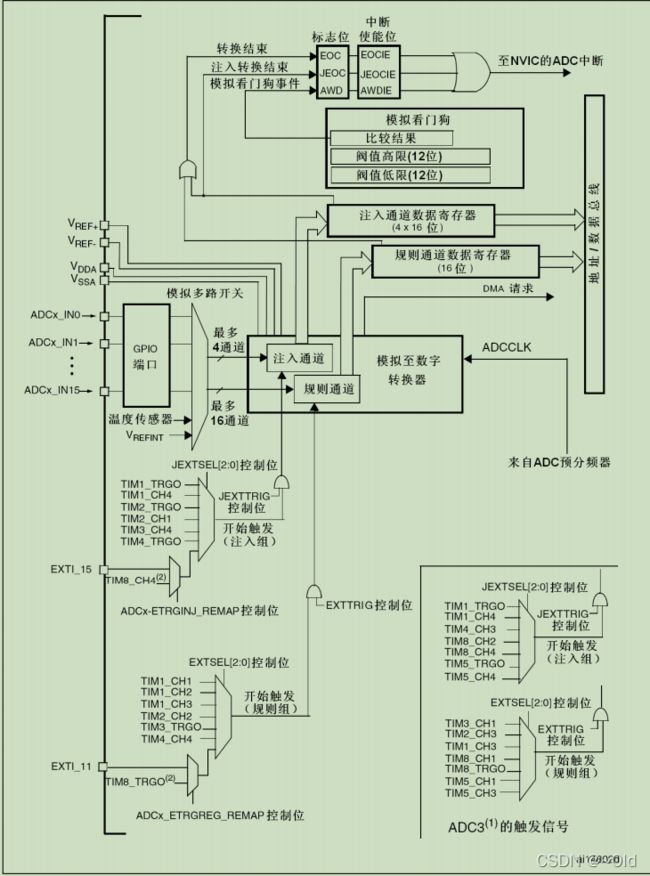
注意:1、ADC3的规则转换和注入转换触发与ADC1和ADC2的不同
2、TIM8_CH4和TIM8_TRGO及他们的重映射位只存在于大容量产品中
ADC引脚
| 名称 | 信号类型 | 注解 |
| Vref+ | 输入,模拟参考正极 | ADC使用的高端。正极参考电压,2.4V<=Vref+<=VDDA |
| VDDA | 输入,模拟电源 | 等效于VDD的模拟电源且:2.4V<=VDDA<=VDD(3.6V) |
| Vref- | 输入,模拟参考负极 | ADC使用的低端/负极参考电压,Vref=VSSA |
| VSSA | 输入,模拟电源地 | 等效于VSS的模拟电源地 |
| ADCx_IN[15:0] | 模拟输入信号 | 16个模拟输入通道 |
VDDA和VSSA应该分别连接到VDD和VSS。
电压输入范围
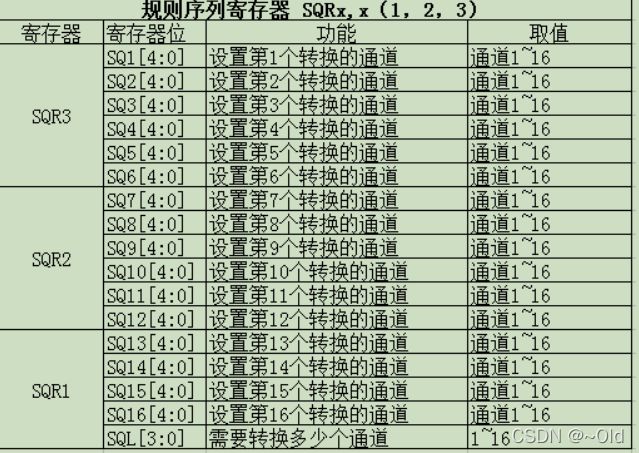
ADC输入范围为Vref- 有16个通道,可以把转换组织分成两组:规则组和注入组。在任意多个通道上以任意顺序进行的一系列转换构成成组转换。例如,可以如下顺序完成转换:通道3、通道8、通道2、通道0、通道2、通道15。 规则组:由多达16个转换组成,规则通道和它们的转换顺序在ADC_SQRx寄存器中选择,规则组中转换的总数应写入ADC_SQR1寄存器的了L[3:0]位中 注入组:由多达4个转换组成,注入通道和它们的转换顺序在ADC_JSQR寄存器中选择,注入组里的转换总数目应写入ADC_JSQR寄存器的L[1:0]中 单次转换模式下,ADC只执行一次转换,该模式下即可通过设置ADC_CR2寄存器的ADON位(只适用于规则通道)启动也可通过外部触发启动(适用于规则通道或注入通道),这时CONT位为0. 一旦选择通道的转换完成: -转换数据被存储在16位ADC_DR寄存器中 -EOC(转换结束)标志被设置 -如果设置了EOCIE,则产生中断 -转换数据被存储在16位的ADC_DRJ1寄存器中 -JEOC(注入转换结束)标志被设置 -如果设置了JEOCIE位,则产生中断 在连续转换模式中,当前面ADC转换一结束马上就启动另一次转换。此模式可通过外部触发启动或通过设置ADC_CR2寄存器上的ADON位启动,此时的CONT位是1. 每个转换后: -规则数据被存储在16位的ADC_DR寄存器中 -EOC(转换结束)标志被设置 -如果设置了EOCIE,则产生中断 -转换数据被存储在16位的ADC_DRJ1寄存器中 -JEOC(注入转换结束)标志被设置 -如果设置了JEOCIE位,则产生中断 规则通道:顾名思义,规则就是规矩的意思,我们平时一般使用的就是这个通道,或者应该说我们用到的就是这个通道,没有什么要特别注意的。 注入通道:注入,可以理解为插入,插队的意思,就是一种不安分的意思,它是一种在规则通道转换的时候强行插入的一种转换通道,如果在规则通道转换过程中,有注入通道插队,那么就要先转换完注入通道,等注入通道完成之后,再回到规则通道的转换流程。这点跟中断程序很像,都是不安分的主,所以注入通道只有在规则通道存在时才会出现。 规则序列寄存器有3个,分别为SQR3、SQR2、SQR1。SQR3控制着规则序列中的第一个到第六个转换,对应的位为:SQ1[4:0]~SQ6[4:0],第一次转换的是位 4:0 SQ1[4:0],如果通道 16 想第一 次转换,那么在 SQ1[4:0] 写 16 即可。SQR2 控制着规则序列中的第 7 到第 12 个转换,对应的位 为:SQ7[4:0]~SQ12[4:0],如果通道 1 想第 8 个转换,则 SQ8[4:0] 写 1 即可。SQR1 控制着规则序 列中的第 13 到第 16 个转换,对应位为:SQ13[4:0]~SQ16[4:0],如果通道 6 想第 10 个转换,则 SQ10[4:0] 写 6 即可。具体使用多少个通道,由 SQR1 的位 L[3:0] 决定,最多 16 个通道。 注入序列寄存器JSQR只有一个,最多支持4个通道,具体多少个由JSQR的JL[2:0]决定。如果JL的值小于4的话,则JSQR跟SQR决定转换顺序的设置不一样,第一次转换的不是JSQR1[4:0];而是JCQRx[4:0],x=4-JL,跟SQR刚好相反,如果 JL=00(1 个转换),那么转换的顺序是从 JSQR4[4:0] 开始,而不是从 JSQR1[4:0] 开始,这个要注意,编程的时候不要搞错。当 JL 等于 4 时,跟 SQR 一样。 通道选好了,转换的顺序也设置好了,那接下来就开始转换了,ADC的转换可以由ADC控制寄存器2:ADC_CR2的ADON这个位来控制,写1的时候开始转换,写0的时候停止转换,这个是最简单也是最好理解的开启ADC转换的控制方式。 除了这种控制方法,ADC还支持触发转换,这个触发包括内部定时器触发和外部IO触发。触发源有很多,具体选择哪一种触发源,由ADC控制寄存器2:ADC_CR2的EXTSEL[2:0]和JEXTSEL [2:0]位来控制。EXTSEL[2:0]用于选择规则通道的触发源JEXTSEL [2:0]用于选择注入通道的触发源。选定好触发源之后,触发源是否要激活,则由 ADC控制寄存器2:ADC_CR2 的 数据转换结束后可以产生中断,中断分为3种:规则通道转换结束中断,注入转换通道转换结束中断,模拟看门狗中断。其中转换结束很好理解,跟我们平时接触的中断一样,有相应的中断标志位和中断使能位,我们还可以根据中断类型写相应的中断服务程序。 当被ADC转换的模拟电压低于阈值或者高于阈值时,就会产生中断,前提是我们开起了模拟看门狗中断,其中低阈值和高阈值由ADC_LTR和ADC_HTR设置。例如我们设置高阈值是2.5V,那么模拟电压超过2.5V的时候,就会产生模拟看门狗中断,反之低阈值也一样。 规则和注入通道转换结束后,除了产生中断外,还可以产生DMA请求,把转换好的数据直接存储在内存里面。要注意的是只有ADC1和ADC3可以产生DMA请求。 main.c 个人总结 关于ADC程序驱动的编写,STM32官方的例程中有一些帮助,对于程序编写的步骤我总结如下: 2、设置ADC的工作参数并初始化 3、设置ADC工作时钟(在RCC文件的ADC设置) 4、设置ADC转换通道顺序和采样时间 5、配置使能ADC转换完成中断,在中断内读取转换数据 6、如果是DMA读取数据,需要配置ADC的响应DMA 7、使能软件触发ADC转换通道选择
单次转换模式
连续转换模式
转换顺序
规则序列
注入序列

触发源
转换时间
中断
转换结束中断
模拟看门狗中断
DMA请求
代码讲解
ADC初始化结构体详解
typedef struct
{
uint32_t ADC_Mode; //ADC工作模式选择
FunctionalState ADC_ScanConvMode; //ADC扫描(多通道)或者单通道模式选择
FunctionalState ADC_ContinuousConvMode; //ADC单次转换或者连续转换选择
uint32_t ADC_ExternalTrigConv; //ADC转换触发信号选择
uint32_t ADC_DataAlign; // ADC 数据寄存器对齐格式
uint8_t ADC_NbrOfChannel; //ADC采集通道数
}ADC_InitTypeDef;宏定义:
#ifndef __BSP_ADC_H
#define __BSP_ADC_H
#include "stm32f10x.h"
/*定义ADC相关的引脚*/
#define ADC_x_1_GPIO_PORT GPIOC
#define ADC_x_1_PIN_0 GPIO_Pin_1
#define ADC_x_1_PIN_1 GPIO_Pin_2
#define ADC_x_2_GPIO_PORT GPIOC
#define ADC_x_2_PIN_0 GPIO_Pin_3
#define ADC_x_2_PIN_1 GPIO_Pin_4
#define ADC_GPIO_CLK RCC_APB2Periph_GPIOC
#define NUMOFCHANNEL 2
/*定义ADC相关的模式配置*/
#define ADC_x_1 ADC1
#define ADC_x_1_CHANNEL_0 ADC_Channel_11
#define ADC_x_1_CHANNEL_1 ADC_Channel_12
#define ADC_x_1_CLK RCC_APB2Periph_ADC1
#define ADC_x_2 ADC2
#define ADC_x_2_CHANNEL_0 ADC_Channel_13
#define ADC_x_2_CHANNEL_1 ADC_Channel_14
#define ADC_x_2_CLK RCC_APB2Periph_ADC2
/*DMA的相关定义*/
#define DMA_CHANNEL DMA1_Channel1
#define DMA_CLK RCC_AHBPeriph_DMA1
/*ADC中断相关宏定义*/
//#define ADC_IRQ ADC1_2_IRQn
//#define ADC_IRQHandler ADC1_2_IRQHandler
void ADCx_Init(void);
#endif /*__BSP_ADC_H*/
#include "bsp_adc.h"
__IO uint32_t ADC_ConvertedValue[NUMOFCHANNEL]={0,0};
/*
编程思路
(1)初始ADC用到的GPIO;
(2)设置ADC的工作参数并初始化
(3)设置ADC的工作时钟
(4)设置ADC转换通道顺序及采样时间
(5)配置使能ADC转换完成中断,在中断内读取转换完数据
(6)使能ADC
(7)使能软件触发ADC转换
ADC转换结果数据使用中断方式读取,这里没有使用DMA进行数据传输
*/
/*
*@brief ADC相关GPIO引脚初始化
*@param None
*@retval:None
*/
static void ADC_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(ADC_GPIO_CLK,ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Pin = ADC_x_1_PIN_0;
GPIO_Init(ADC_x_1_GPIO_PORT,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = ADC_x_1_PIN_1;
GPIO_Init(ADC_x_1_GPIO_PORT,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = ADC_x_2_PIN_0;
GPIO_Init(ADC_x_2_GPIO_PORT,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = ADC_x_2_PIN_1;
GPIO_Init(ADC_x_2_GPIO_PORT,&GPIO_InitStruct);
}
/*
*@brief ADC模式配置
*@param None
*@retvla None
*/
static void ADC_Mode_Config(void)
{
ADC_InitTypeDef ADC_InitStruct;
DMA_InitTypeDef DMA_InitStruct;
RCC_APB2PeriphClockCmd(ADC_x_1_CLK,ENABLE);
RCC_APB2PeriphClockCmd(ADC_x_2_CLK,ENABLE);
RCC_AHBPeriphClockCmd(DMA_CLK,ENABLE);
DMA_DeInit(DMA_CHANNEL);
/*-------------- Reset DMA init structure parameters values ------------------*/
/* Initialize the DMA_PeripheralBaseAddr member */
DMA_InitStruct.DMA_PeripheralBaseAddr = (uint32_t) ( & ( ADC_x_1->DR ) ) ;
/* Initialize the DMA_MemoryBaseAddr member */
DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)ADC_ConvertedValue;
/* Initialize the DMA_DIR member */
DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralSRC;
/* Initialize the DMA_BufferSize member */
DMA_InitStruct.DMA_BufferSize = NUMOFCHANNEL;
/* Initialize the DMA_PeripheralInc member */
DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
/* Initialize the DMA_MemoryInc member */
DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;
/* Initialize the DMA_PeripheralDataSize member */
DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Word;
/* Initialize the DMA_MemoryDataSize member */
DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_Word;
/* Initialize the DMA_Mode member */
DMA_InitStruct.DMA_Mode = DMA_Mode_Circular;
/* Initialize the DMA_Priority member */
DMA_InitStruct.DMA_Priority= DMA_Priority_High;
/* Initialize the DMA_M2M member */
DMA_InitStruct.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA_CHANNEL,&DMA_InitStruct);
DMA_Cmd(DMA_CHANNEL,ENABLE);
/********************以下是ADC初始化部分************************/
/* Reset ADC init structure parameters values */
/* Initialize the ADC_Mode member */
ADC_InitStruct.ADC_Mode = ADC_Mode_RegSimult;
/* initialize the ADC_ScanConvMode member */
ADC_InitStruct.ADC_ScanConvMode = ENABLE;
/* Initialize the ADC_ContinuousConvMode member */
ADC_InitStruct.ADC_ContinuousConvMode = ENABLE;
/* Initialize the ADC_ExternalTrigConv member */
ADC_InitStruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
/* Initialize the ADC_DataAlign member */
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;
/* Initialize the ADC_NbrOfChannel member */
ADC_InitStruct.ADC_NbrOfChannel = NUMOFCHANNEL;
//初始化ADC
ADC_Init(ADC_x_1,&ADC_InitStruct);
//配置ADC时钟,CLK2的6分频,即12MHZ
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
//配置ADC通道转换顺序为1,第一个转换,采样时间28.5个时钟周期
ADC_RegularChannelConfig(ADC_x_1,ADC_x_1_CHANNEL_0,1,ADC_SampleTime_28Cycles5);
ADC_RegularChannelConfig(ADC_x_1,ADC_x_1_CHANNEL_1,2,ADC_SampleTime_28Cycles5);
ADC_DMACmd(ADC_x_1,ENABLE);
ADC_Cmd(ADC_x_1,ENABLE);
/*******************ADC2初始化配置********************/
ADC_InitStruct.ADC_Mode = ADC_Mode_RegSimult;
ADC_InitStruct.ADC_ScanConvMode = ENABLE;
ADC_InitStruct.ADC_ContinuousConvMode = ENABLE;
ADC_InitStruct.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStruct.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStruct.ADC_NbrOfChannel = NUMOFCHANNEL;
ADC_Init(ADC_x_2,&ADC_InitStruct);
//配置ADC时钟,CLK2的6分频,即12MHZ
RCC_ADCCLKConfig(RCC_PCLK2_Div6);
//配置ADC通道转换顺序为1,第一个转换,采样时间28.5个时钟周期
ADC_RegularChannelConfig(ADC_x_2,ADC_x_2_CHANNEL_0,1,ADC_SampleTime_28Cycles5);
ADC_RegularChannelConfig(ADC_x_2,ADC_x_2_CHANNEL_1,2,ADC_SampleTime_28Cycles5);
//使用外部触发ADC转换
ADC_ExternalTrigConvCmd(ADC_x_2, ENABLE);
ADC_Cmd(ADC_x_2,ENABLE);
//ADC转换结束产生中断,在中断服务函数中读取转换值
// ADC_ITConfig(ADC_x,ADC_IT_EOC,ENABLE);
/*************ADC1*************/
//初始化ADC校准寄存器
ADC_ResetCalibration(ADC_x_1);
//等待校准寄存器初始化完成
while(ADC_GetResetCalibrationStatus(ADC_x_1));
//ADC开始校准
ADC_StartCalibration(ADC_x_1);
//等待校准完成
while(ADC_GetCalibrationStatus(ADC_x_1));
/*************ADC2**************/
//初始化ADC校准寄存器
ADC_ResetCalibration(ADC_x_2);
//等待校准寄存器初始化完成
while(ADC_GetResetCalibrationStatus(ADC_x_2));
//ADC开始校准
ADC_StartCalibration(ADC_x_2);
//等待校准完成
while(ADC_GetCalibrationStatus(ADC_x_2));
//由于没有采用外部触发,所以使用软件触发ADC转换
ADC_SoftwareStartConvCmd(ADC_x_1,ENABLE);
}
/*
*@brief ADC中断配置
*@param None
*@retval:None
*/
//static void ADC_NVIC_Config(void)
//{
// NVIC_InitTypeDef NVIC_InitStruct;
//
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0);
// NVIC_InitStruct.NVIC_IRQChannel = ADC_IRQ;
//
// NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
//
// NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
//
// NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
//
//
// NVIC_Init(&NVIC_InitStruct);
//}
/*
*brief ADC初始化
*@param None
*retval None
*/
void ADCx_Init(void)
{
ADC_GPIO_Config();
ADC_Mode_Config();
// ADC_NVIC_Config();
}
/*
双重ADC多通道采集实验
*/
#include "stm32f10x.h"
#include "bsp_uart.h"
#include "led.h"
#include "bsp_adc.h"
extern __IO uint32_t ADC_ConvertedValue[NUMOFCHANNEL];
float ADC_ConvertedValueLocal[NUMOFCHANNEL*2];
void Delay(uint32_t count)
{
for(;count!=0;count--);
}
int main(void)
{
uint16_t temp0=0,temp1=0,temp2=0,temp3=0;
GPIO_LED_Config();
USART1_Config();
ADCx_Init();
printf("**********这是一个ADC测试实验***********\n");
while(1)
{
temp0 = (ADC_ConvertedValue[0]&0xFFFF0000)>>16;//ADC2CH1
temp1 = (ADC_ConvertedValue[0]&0xFFFF);//ADC1 CH1
temp2 = (ADC_ConvertedValue[1]&0xFFFF0000)>>16;//ADC2 CH2
temp3 = (ADC_ConvertedValue[1]&0xFFFF);//ADC1 CH2
ADC_ConvertedValueLocal[0] = (float)temp0/4096*3.3; //ADC2 CH1
ADC_ConvertedValueLocal[1] = (float)temp1/4096*3.3; //ADC1 CH1
ADC_ConvertedValueLocal[2] = (float)temp2/4096*3.3; //ADC2 CH2
ADC_ConvertedValueLocal[3] = (float)temp3/4096*3.3; //ADC1 CH2
printf("\r\nADC1的通道11的值为:%f",ADC_ConvertedValueLocal[1]);
printf("\r\nADC1的通道12的值为:%f",ADC_ConvertedValueLocal[3]);
printf("\r\nADC2的通道13的值为:%f",ADC_ConvertedValueLocal[0]);
printf("\r\nADC1的通道14的值为:%f",ADC_ConvertedValueLocal[2]);
printf("\r\r\r\n");
Delay(0xffffee);
}
}
1、初始ADC用到的GPIO