基于 MM32 的USB Bootloader —— 实现固件在线调试
用途与背景
在MCU开发中,固件的调试离不开烧录工具,烧录工具的种类有很多,常见的比如有ST-Link、J-Link、DAP等等。这些烧录工具的接口都不是统一的,并且它们的引脚接线往往需要非常仔细、慎重,才能保证正确烧录程序并调试。为了解决这个问题,本文提供了一种使用USB线即可完成程序在线调试的方法。USB已经是生活中常见的接口,并且它是以“盲插”的方式接入电脑的,也就是说,不会出现接错的情况。
另外,在SRAM上调试的速度可比flash快很多,并且不用担心flash的寿命问题,但相应的,也就有掉电无法保存的缺陷。
效果演示
当试用板的USB接口接入计算机时,计算机会弹出“U盘”的弹窗,此时,可将MCU的bin固件放入此U盘中(注意:目前Bootloader只检测“project”名称的bin固件),在传输完成后,按下试用板的“D7”按键,实现将“project.bin”固件的内容拷贝到外部sram。之后,MCU跳转到外部sram执行程序。这样就实现了在线调试程序的效果。
想观看效果演示的话,可以查看以下链接:
https://www.bilibili.com/video/BV15B4y1V7Tt/?aid=602151098&cid=810080747&page=1
整体原理介绍
存储分布
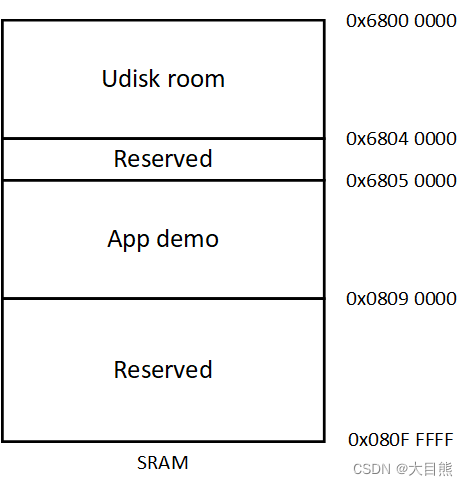
USB Bootloader主要涉及到2个存储区域,一是USB MSC设备的存储区,二是用户app的存储区。这两者目前都存放在SRAM中,其内存分布如下:
USB
USB是一种通用的串行通信方式,其硬件底层使用NAZI编码,并采用差分方式传输,进行了位填充、串行化、反串行化、CRC校验等处理,这些底层的处理都是由芯片硬件完成的,作为开发者无需关注更多。在经历这些底层的传输后,我们真正可以拿到的数据都是从端点取到的,当然,也可以通过端点发送数据。端点是通过端点号来标识的,端点0永远是控制端点,可以双向传输,其余端点只能标志为单向传输。基于端点之上,USB协议栈抽象了接口、配置和设备等概念,对应的,也就有端点描述符、接口描述符、配置描述符和设备描述符等。接口描述符包含了USB设备的功能信息,例如本文涉及到的U盘其实就是在接口描述符中添加MSC接口。更多USB基础知识可以直接上USB官网下载相关文档学习。
FATFS
我们知道,每个U盘在使用之前(如果还没有格式化),需要先格式化操作。在格式化过程中会选择格式化的文件系统。文件系统本质上是一种数据结构,完成数据的索引和存取。在windows的格式化选项中,一般会有fatfs文件系统,fatfs文件系统也是嵌入式领域常用的开源文件系统,因此,需要移植一个fatfs文件系统,实现对存储空间的文件系统制作以及文件数据的存取(也可以自己实现文件系统制作和数据存取,这需要了解文件系统构成,并且会降低程序可读性)。
关键实现
USB MSC存储空间操作
根据USB MSC的相关规范,USB主机会发送以下命令:
- READ FORMAT CAPACITIES 和 READ CAPACITY
"READ FORMAT CAPACITIES"用于获取可格式化的最大容量,"READ CAPACITY"用于获取实际设备存储媒介的容量。在MindMotion的MSC例程中,这两者都回调同一个函数,也即两者返回容量一致,本文在此处将返回的容量改为256k的空间大小。如下:
enum
{
DISK_BLOCK_NUM = 2 * 256, // 256k
DISK_BLOCK_SIZE = 512
};
- READ
USB主机通过该命令读取U盘数据。在TinyUSB协议栈中,设备在接收到该命令时,回调“tud_msc_read10_cb”函数,在该函数添加SRAM读取处理即可。如下:
int32_t tud_msc_read10_cb(uint8_t lun, uint32_t lba, uint32_t offset, void* buffer, uint32_t bufsize)
{
(void) lun;
if ( lba >= DISK_BLOCK_NUM ) return -1;
udisk_sram_read(lba * DISK_BLOCK_SIZE + offset, (uint8_t *)buffer, bufsize);
return bufsize;
}
- WRITE
与READ类似,设备在接收到该命令时,回调“tud_msc_write10_cb”函数,在该函数添加SRAM写入处理即可。如下:
int32_t tud_msc_write10_cb(uint8_t lun, uint32_t lba, uint32_t offset, uint8_t* buffer, uint32_t bufsize)
{
(void) lun;
// out of ramdisk
if ( lba >= DISK_BLOCK_NUM ) return -1;
#ifndef CFG_EXAMPLE_MSC_READONLY
udisk_sram_write(lba * DISK_BLOCK_SIZE + offset, buffer, bufsize);
#else
(void) lba; (void) offset; (void) buffer;
#endif
return bufsize;
}
FATFS移植
进入fatfs官网下载源码,fatfs本质上是实现对数据的组织,其移植十分简单,主要在“diskio.c”文件中,在该文件中,实现对设备实际上存储媒介的状态查询、初始化、读写、和信息查询等接口即可。以下给出读写的代码参考:
DRESULT disk_read (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
BYTE *buff, /* Data buffer to store read data */
LBA_t sector, /* Start sector in LBA */
UINT count /* Number of sectors to read */
)
{
switch (pdrv) {
case DEV_RAM :
FATFS_SRAM_READ(sector * FF_MIN_SS, buff, count * FF_MIN_SS);
return RES_OK;
//case DEV_FLASH :
}
return RES_PARERR;
}
DRESULT disk_write (
BYTE pdrv, /* Physical drive nmuber to identify the drive */
const BYTE *buff, /* Data to be written */
LBA_t sector, /* Start sector in LBA */
UINT count /* Number of sectors to write */
)
{
switch (pdrv) {
case DEV_RAM :
FATFS_SRAM_WRITE(sector * FF_MIN_SS, (uint8_t *)buff, count * FF_MIN_SS);
return RES_OK;
//case DEV_FLASH :
//return res;
}
return RES_PARERR;
}
程序跳转
程序跳转主要包括以下步骤:
- 外设解初始化;
- 中断向量重定向;
- 堆栈指针重定位;
- 跳转到指定地址运行。
可参考如下:
void jump_to_app()
{
printf("jump to app\r\n");
dcd_int_disable(0);
USB_Enable(BOARD_USB_PORT, false);
UART_Enable(BOARD_DEBUG_UART_PORT, false);
SCB->VTOR = APP_START_ADDR;
Jump_To_App();
}
Jump_To_App的实现如下:
Jump_To_App:
ldr r0, = 0x68050000
ldr r0, [r0]
mov sp, r0
ldr r0, = 0x68050000 + 4
ldr r0, [r0]
bx r0
注意事项
由于用户app是运行在sram上的,此时用户程序最好不要有sram的其它相关操作。并且由于bootloader已经使能了fsmc接口的相关引脚时钟,包括GPIOD、GPIOE、GPIOF、GPIOG,为了保证sram能够持续工作,用户app如若需要使用到“GPIOD、GPIOE、GPIOF、GPIOG”端口的相关引脚,不能再去打开这些端口的时钟,否则,sram会被中断导致用户app无法执行,出现“卡死”现象。
更新的用户程序需要做一些修改,主要在于分散加载文件,由于固件在sram上跑,因此程序的加载和运行位置都需要修改,以“plus-f5270_mdk\driver_examples\uart\uart_basic”例程为例,在默认的分散加载文件“mm32f5277e_flash.scf”中修改,具体如下:
#define __ROM_BASE 0x68050000
#define __ROM_SIZE 0x00040000
栈的起始位置可以覆盖之前的位置。
在Keil中默认生成的固件为hex固件,可在设置中配置使其生成bin固件,如下:

拓展与升级
目前,该Bootloader仅仅实现在SRAM中跑程序,可进一步实现将固件数据拷贝到flash,实现程序升级。MM32F5277E9支持XIP,因此也可实现程序放置在外部flash上运行,从而支持大规模的应用。