51单片机DS18B20温度传感器原理及实验
目录
-
-
-
-
- DS18B20简介
- 外部结构
- 内部结构
- 数据温度的读取
- 实验
- 程序实现
- 附
-
-
-
DS18B20简介
DS18B20 是由 DALLAS 半导体公司推出的一种的“一线总线(单总线)”接口的温度传感器。与传统的热敏电阻等测温元件相比,它是一种新型的体积小、适用电压宽、与微处理器接口简单的数字化温度传感器。
- 特点
1、适应电压范围更宽,电压范围:3.0~5.5V,在寄生电源方式下可由数据线供电。
2、独特的单线接口方式,DS18B20 在与微处理器连接时仅需要一条口线即可实现微处理器与 DS18B20 的双向通讯。
3、DS18B20 支持多点组网功能,多个 DS18B20 可以并联在唯一的三线上,实现组网多点测温。
4、DS18B20 在使用中不需要任何外围元件,全部传感元件及转换电路集成在形如一只三极管的集成电路内。
5、温范围-55℃~+125℃,在-10~+85℃时精度为±0.5℃
6、可编程的分辨率为 9~12 位,对应的可分辨温度分别为 0.5℃、0.25℃、0.125℃ 和 0.0625℃,可实现高精度测温。
7、在 9 位分辨率时最多在 93.75ms 内把温度转换为数字,12 位分辨率时最多在 750ms 内把温度值转换为数字,速度更快。
8、测量结果直接输出数字温度信号,以"一根总线"串行传送给 CPU,同时可传送 CRC 校验码,具有极强的抗干扰纠错能力。
9、负压特性:电源极性接反时,芯片不会因发热而烧毁,但不能正常工作。
外部结构
- 外部实物图
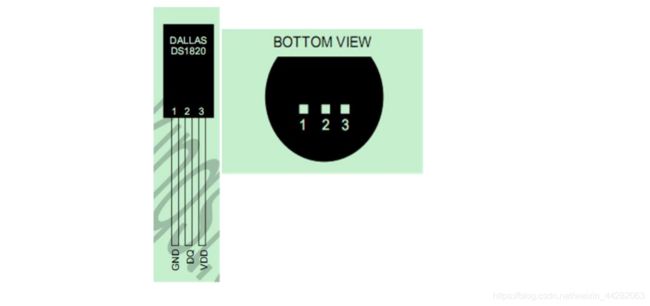
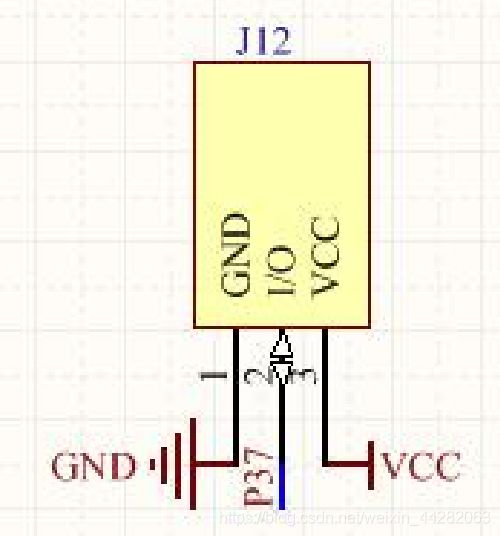
从 DS18B20 外观图可以看到,当我们正对传感器切面(传感器型号字符那一面)时,传感器的管脚顺序是从左到右排列。管脚 1 为 GND,管脚 2 为数据DQ,管脚 3 为 VDD。
如果把传感器插反,那么电源将短路,传感器就会发烫,很容易损坏,所以一定要注意传感器方向。
内部结构
- 内部结构图
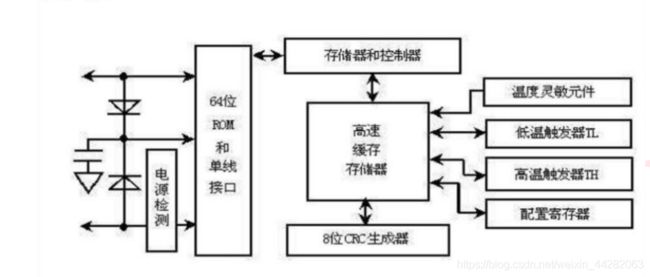
ROM 中的 64 位序列号是出厂前被光刻好的,它可以看作是该 DS18B20 的地址序列号。光刻 ROM 的作用是使每一个 DS18B20 都各不相同,这样就可以实现一根总线上挂接多个 DS18B20 的目的。
DS18B20 温度传感器的内部存储器包括一个高速的暂存器 RAM 和一个非易失性的可电擦除的 EEPROM,后者存放高温度和低温度触发器 TH、TL 和配置寄存器。
- 配置寄存器
结构:

配置寄存器是配置不同的位数来确定温度和数字的转化,低五位一直都是"1",TM 是测试模式位,用于设置 DS18B20 在工作模式还是在测试模式。在 DS18B20 出厂时该位被设置为 0,用户不需要去改动。R1 和
R0 用来设置 DS18B20 的精度(分辨率),可设置为 9,10,11 或 12 位,对应的分辨率温度是 0.5℃,0.25℃,0.125℃和 0.0625℃。在初始状态下默认的精度是 12 位,即 R0=1、 R1=1。
R0 和 R1 配置如图:

- 高速暂存存储器
高速暂存存储器由 9个字节组成,其分配如下:

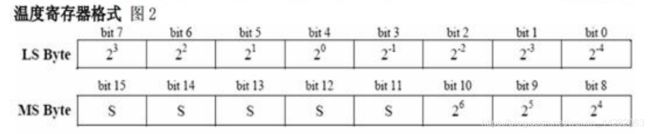
当温度转换命令(44H)发布后,经转换所得的温度值以二字节补码形式存放在高速暂存存储器的第 0 和第 1 个字节。
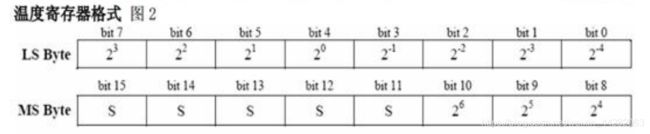
如图,存储的两个字节,一个字节8位共16位,高字节的前 5 位是符号位 S,单片机可通过单线接口读到该数据,读取时低位在前,高位在后。
如果测得的温度大于 0,这 5 位为‘ 0’,只要将测到的数值乘以 0.0625(默认精度是 12 位)即可得到实际温度;如果温度小于 0,这 5 位为‘ 1’,测到的数值需要取反加 1 再乘以 0.0625 即可得到实际温度。
举个例子:
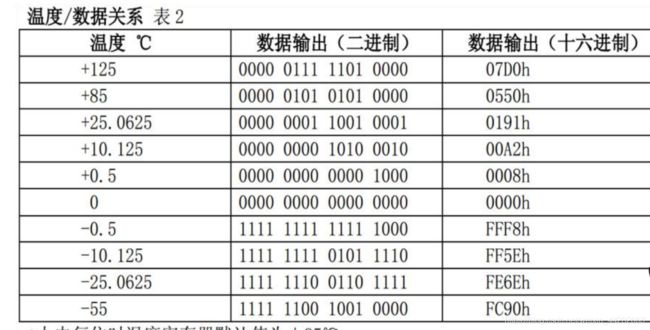
以85度为例,温度大于0,所以看到两个字节的前5位为0,然后二进制转十进制:26+24+22+20=85.
数据输出十六进制是 0X0550,因为高字节的高 5位为 0,表明检测的温度是正温度,0X0550 对应的十进制为 1360,将这个值乘以 12 位精度 0.0625,所以可以得到+85 度
数据温度的读取
- 由于DS18B20 是单总线器件,所有的单总线器件都要求采用严格的信号时序,以保证
数据的完整性。
DS18B20 时序包括如下几种:初始化时序、写(0 和 1)时序、读(0 和 1)时序。 DS18B20 发送所有的命令和数据都是字节的低位在前。 - 初始化时序:

单总线上的所有通信都是以初始化时序开始。主机输出低电平,保持低电平时间至少 480us(该时间的时间范围可以从 480 到 960 微妙),以产生复位脉冲。接着主机释放总线,外部的上拉电阻将单总线拉高(外部上来电阻接高电平),延时 15~60 us,并进入接收模式。接着 DS18B20 拉低总线 60~240 us,以产生低电平应答脉冲,若为低电平,还要做延时,其延时的时间从外部上拉电阻将单总线拉高算起最少要480 微妙。
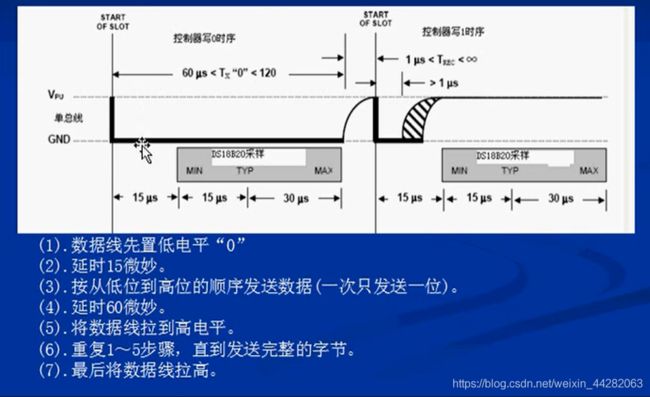
- 写时序
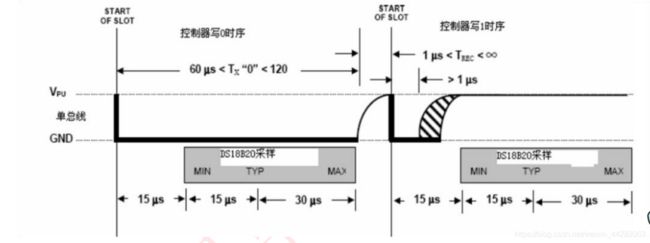
写时序包括写 0 时序和写 1 时序。所有写时序至少需要 60us,且在 2 次独立的写时序之间至少需要 1us 的恢复时间,两种写时序均起始于主机拉低总线。写 1 时序:主机输出低电平,延时 2us,然后释放总线,延时 60us。写 0时序:主机输出低电平,延时 60us,然后释放总线,延时 2us。
- 读时序
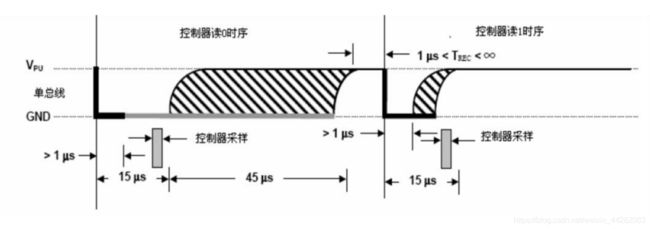
单总线器件仅在主机发出读时序时,才向主机传输数据,所以,在主机发出读数据命令后,必须马上产生读时序,以便从机能够传输数据。所有读时序至少需要 60us,且在 2 次独立的读时序之间至少需要 1us 的恢复时间。每个读时序都由主机发起,至少拉低总线 1us。主机在读时序期间必须释放总线,并且在时序起始后的 15us 之内采样总线状态。
- 温度读取过程
DS18B20 的典型温度读取过程为:复位→发 SKIP ROM 命令(0XCC)→发开始转换命令(0X44)→延时→复位→发送 SKIP ROM 命令(0XCC)→发读存储器命令(0XBE)→连续读出两个字节数据(即温度)→结束。
实验
- 实现功能
系统运行时,插上 DS18B20 温度传感器,数码管显示检测的温度值。 - 实现原理
动态数码管显示原理
(查看动态数码管显示原理笔记)
DS18B20温度读取原理
原理图:
程序实现
第一部分
- 头文件
#ifndef __TEMP_H_
#define __TEMP_H_
#include
//---重定义关键词---//
#ifndef uchar //条件定义
#define uchar unsigned char //无符号字符型
#endif
#ifndef uint
#define uint unsigned int //无符号整型
#endif
//--定义使用的IO口--//
sbit DSPORT=P3^7;
//--声明全局函数--//
void Delay1ms(uint );
uchar Ds18b20Init();
void Ds18b20WriteByte(uchar com);
uchar Ds18b20ReadByte();
void Ds18b20ChangTemp();
void Ds18b20ReadTempCom();
int Ds18b20ReadTemp();
#endif
第二部分
- 传感器温度读取过程
(1)初始化时序

如图,先将总线拉高,延时后,DS18B20做出相应将总线拉低,则初始化完成。
uchar Ds18b20Init()
{
uchar i;
DSPORT = 0; //将总线拉低480us~960us
i = 70;
while(i--);//延时642us
DSPORT = 1; //然后拉高总线,如果DS18B20做出反应会将在15us~60us后总线拉低
i = 0;
while(DSPORT) //等待DS18B20拉低总线
{
Delay1ms(1);
i++;
if(i>5)//等待>5MS,说明总线没有被拉低,初始化失败
{
return 0;//初始化失败
}
}
return 1;//若为低电平,直接跳过while循环初始化成功
}
(2)写时序
void Ds18b20WriteByte(uchar dat)
{
uint i, j;
for(j=0; j<8; j++)//8位数据
{
DSPORT = 0; //每写入一位数据之前先把总线拉低1us
i++;
DSPORT = dat & 0x01; //然后写入一个数据,从最低位开始。位运算的与运算,只要数据中有0,则相与后为0,只有为1相与为1
i=6;//延时初值
while(i--); //延时68us,因为持续时间最少60us
DSPORT = 1; //然后释放总线,至少1us给总线恢复时间才能接着写入第二个数值
dat >>= 1; //移位,从低位向高位写入数据,所以,最低为写入后,向右移,原来的次低位代替原来的低位。
}
}
(3)读时序

uchar Ds18b20ReadByte()
{
uchar byte, bi;
uint i, j;
for(j=8; j>0; j--)
{
DSPORT = 0;//先将总线拉低1us
i++;
DSPORT = 1;//然后释放总线
i++;
i++;//延时6us等待数据稳定
bi = DSPORT; //读取数据,从最低位开始读取
/*将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉那位补0。*/
byte = (byte >> 1) | (bi << 7); //先将byte右移1位,然后bi左移7位,相或得到数据
i = 4; //读取完之后等待48us再接着读取下一个数
while(i--);
}
return byte;
}
- 指令操作
RAM指令表

ROM指令表

(1)转换温度启动指令
void Ds18b20ChangTemp()
{
Ds18b20Init(); //初始化
Delay1ms(1); //延时
Ds18b20WriteByte(0xcc); //写入跳过ROM操作命令(cc)
Ds18b20WriteByte(0x44); //温度转换命令(44)
//Delay1ms(100); //等待转换成功,而如果你是一直刷着的话,就不用这个延时了
}
(2)读取温度命令
void Ds18b20ReadTempCom()
{
Ds18b20Init();
Delay1ms(1);
Ds18b20WriteByte(0xcc); //跳过ROM操作命令
Ds18b20WriteByte(0xbe); //发送读取温度命令
}
(3)读取温度
共16字节,先读低位再读高位
int Ds18b20ReadTemp()
{
int temp = 0;
uchar tmh, tml;
Ds18b20ChangTemp(); //先写入转换命令
Ds18b20ReadTempCom(); //然后等待转换完后发送读取温度命令
tml = Ds18b20ReadByte(); //读取温度值共16位,先读低字节
tmh = Ds18b20ReadByte(); //再读高字节
temp = tmh;
temp <<= 8; //移位运算,高字节左移8位,变为16位的高字节
temp |= tml; //位运算中的或运算,组合
return temp; //高8位和低8位的组合
}
第三部分
- 主函数
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
#include"temp.h"
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
sbit LSA=P2^2;
sbit LSB=P2^3;
sbit LSC=P2^4;
char num=0;
u8 DisplayData[8];
u8 code smgduan[10]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f}; //数码管段选数据
/*******************************************************************************
* 函 数 名 : delay
* 函数功能 : 延时函数,i=1时,大约延时10us
*******************************************************************************/
void delay(u16 i)
{
while(i--);
}
/*
* 函 数 名 : datapros()
* 函数功能 : 温度读取处理转换函数
* 输 入 : temp
* 输 出 : 无
*/
void datapros(int temp)
{
float tp;
if(temp< 0) //当温度值为负数
{
DisplayData[0] = 0x40;
//因为读取的温度是实际温度的补码,所以减1,再取反求出原码
temp=temp-1;
temp=~temp;
tp=temp;
temp=tp*0.0625*100+0.5;
//留两个小数点就*100,+0.5是四舍五入,因为C语言浮点数转换为整型的时候把小数点
//后面的数自动去掉,不管是否大于0.5,而+0.5之后大于0.5的就是进1了,小于0.5的就
//算加上0.5,还是在小数点后面。
}
else
{
DisplayData[0] = 0x00;
tp=temp;//因为数据处理有小数点所以将温度赋给一个浮点型变量
//如果温度是正的那么,那么正数的原码就是补码它本身
temp=tp*0.0625*100+0.5;
}
DisplayData[1] = smgduan[temp/10000];
DisplayData[2] = smgduan[temp % 10000/ 1000];
DisplayData[3] = smgduan[temp % 10000%1000/100]|0x80;
DisplayData[4] = smgduan[temp % 100/10];
DisplayData[4] = smgduan[temp % 100%10];
}
/*******************************************************************************
* 函数名 :DigDisplay()
* 函数功能 :数码管显示函数
* 输入 : 无
* 输出 : 无
*******************************************************************************/
void DigDisplay()
{
u8 i;
for(i=0;i<6;i++)
{
switch(i) //位选,选择点亮的数码管,
{
case(0):
LSA=1;LSB=1;LSC=1; break;//显示第0位
case(1):
LSA=0;LSB=1;LSC=1; break;//显示第1位
case(2):
LSA=1;LSB=0;LSC=1; break;//显示第2位
case(3):
LSA=0;LSB=0;LSC=1; break;//显示第3位
case(4):
LSA=1;LSB=1;LSC=0; break;//显示第4位
case(5):
LSA=0;LSB=1;LSC=0; break;//显示第5位
}
P0=DisplayData[i];//发送数据
delay(100); //间隔一段时间扫描
P0=0x00;//消隐
}
}
/*
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*/
void main()
{
while(1)
{
datapros(Ds18b20ReadTemp()); //数据处理函数
DigDisplay();//数码管显示函数
}
}
附
数码管显示原理
编程讲解