【蓝桥杯】【嵌入式组别】第十一节:实时时钟RTC
实时时钟RTC
- RTC简介
- 程序设计
RTC简介
- 可以提供一个自动唤醒服务,让单片机从低功耗模式恢复到正常工作模式。
- RTC是一个独立BCD码(二进制编码的十进制数)的定时器和计数器。
- 可以提供时间,日期,年等信息
- 只要外部的供电电压还在供电范围,RTC就不会停止计数
- 数字校准精度高
- RTC的时钟源可以选择LSE或者HSI(都是外部晶振)
- RTC也可以选择内部的LSI32位慢速时钟源
程序设计
- 【模板】作为STM32CUBEMX生成代码的工程;
- 启用RTC的时钟、日历功能;
- 根据需求,配置RTC的时钟、初始化状态,并把输入到RTC模块的时钟配置成1Hz!
- 将rtc.c 和rtc.h移植到【编程工程】
4.1main.c包含#include“rtc.h”
4.2 stm32g4xx hal confh 中启动RTC模块
4.3 时钟初始化,一定要初始化LSI作为RTC的时钟源
4.4 调用HAL RTC GetTime和HAL RTC GetDate获取时间和日期!
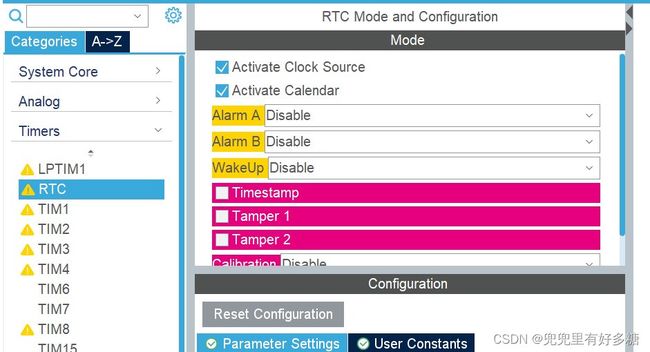
找到timers下面的RTC,然后勾选前面两个选项,就会开启RTC的时钟源和计时功能:
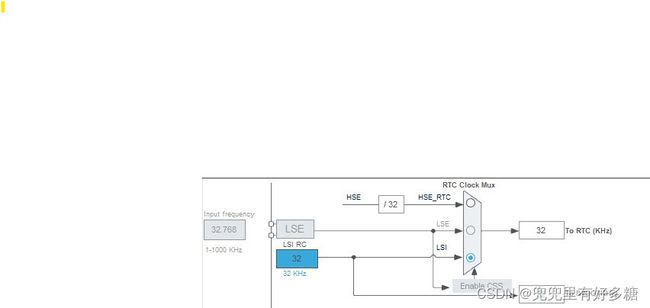
然后我们可以看到时钟树中已经默认配置时钟源为LSI(32khz内部低速时钟),就保持默认即可。
下一步就是配置分频值和预分频值,使得RTC的频率为1HZ。

此处给出的默认的分频值和预分频值的分频是:
128*256=32768(分频是从0开始的,所以127其实分频是128),也就是如果RTC接的晶振频率是32768HZ,那么经过127的预分频和255的分频之后,RTC的频率就是1HZ。
但是我们现在接的时钟源是32KHZ,所以这个值是有问题的。所以我们应该改这两个值。
比如改成31和999就可以了。

然后下面的一些参数可以按照如下设置,便于我们观察现象:

之后就可生成代码,然后进行移植了。
最重要的要记住的一点就是RTC的移植还要带一步初始化LSI为RTC的时钟源:
就是用模板里面的main.c中的下面这段程序:
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_RTC|RCC_PERIPHCLK_ADC12;
PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;
PeriphClkInit.RTCClockSelection = RCC_RTCCLKSOURCE_LSI;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
替换掉编程文件main.c中的下面这段:
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_ADC12;
PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
然后编写RTC的启动程序:
RTC_TimeTypeDef rtc_time;
RTC_DateTypeDef rtc_date;
void RTC_Process(void)
{
HAL_RTC_GetTime(&hrtc,&rtc_time,RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc,&rtc_date,RTC_FORMAT_BIN);
}
完整的main.c如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2021 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "gpio.h"
#include "led.h"
#include "key.h"
#include "i2c.h"
#include "dac.h"
#include "rtc.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//Led执行程序
__IO uint32_t ledTick =0,keyTick=0;
u8 led_ctrl=0xff;
void LED_Process(void)
{
if(uwTick-ledTick<500)return;
ledTick=uwTick;
LED_Control(led_ctrl);
led_ctrl=~led_ctrl;
}
//KEY
void KEY_Process(void)
{
if(uwTick-keyTick<10)return;
keyTick=uwTick;
Key_Read();
// if(Trg&0x01)
// {
// LED_Control(0x01);
// }
if(Trg)
{
LED_Control(Trg);
}
}
//EEPROM
u8 val_24c02=0;
//DAC
u16 dac_ch1_val,dac_ch2_val;
void DAC_Process(void)
{
dac_ch1_val=(1.1f/3.3f*4095);//输出1.1V
dac_ch2_val=(2.1f/3.3f*4095);//输出2.2V
HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_1,DAC_ALIGN_12B_R,dac_ch1_val);//0->0V;4095->3.3V
HAL_DAC_Start(&hdac1,DAC_CHANNEL_1);
HAL_DAC_SetValue(&hdac1,DAC_CHANNEL_2,DAC_ALIGN_12B_R,dac_ch2_val);//0->0V;4095->3.3V
HAL_DAC_Start(&hdac1,DAC_CHANNEL_2);
}
//RTC
RTC_TimeTypeDef rtc_time;
RTC_DateTypeDef rtc_date;
void RTC_Process(void)
{
HAL_RTC_GetTime(&hrtc,&rtc_time,RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc,&rtc_date,RTC_FORMAT_BIN);
}
//LCD
void LCD_Process(void)
{
u8 display_buf[20];
sprintf((char*)display_buf,"%02d-%02d-%02d",rtc_time.Hours,rtc_time.Minutes,rtc_time.Seconds);
LCD_DisplayStringLine(Line0,display_buf);
sprintf((char*)display_buf,"%04d-%02d-%02d",rtc_date.Year,rtc_date.Month,rtc_date.Date);
LCD_DisplayStringLine(Line1,display_buf);
sprintf((char*)display_buf,"EEPROM:%d",val_24c02);
LCD_DisplayStringLine(Line2,display_buf);//输出百分号:%
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
LCD_Init();
LED_Control(0x00);
MX_DAC1_Init();
MX_RTC_Init();
I2CInit();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
LCD_Clear(Blue);
LCD_SetBackColor(Blue);
LCD_SetTextColor(White);
EEPROM_Write(0x10,0x55);
val_24c02=EEPROM_Read(0x10);
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
LED_Process();
KEY_Process();
DAC_Process();
RTC_Process();
LCD_Process();
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
/** Initializes the peripherals clocks
*/
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_RTC|RCC_PERIPHCLK_ADC12;
PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK;
PeriphClkInit.RTCClockSelection = RCC_RTCCLKSOURCE_LSI;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/