Linux 蜂鸣器实验-基于正点原子IMX6ULL开发板
从软件的角度考虑,蜂鸣器驱动和 LED 灯驱动是一样的,都是控制 IO 输出高低电平。本实验来编写蜂鸣器的 Linux 驱动,也算是 pinctrl 和 gpio 子系统的巩固。
1 蜂鸣器驱动原理
I.MX6U-ALPHA 开发板上的蜂鸣器通过 SNVS_TAMPER1 引脚来控制,在 Linux 下编写蜂鸣器驱动需要做以下工作
①、在设备树中添加 SNVS_TAMPER1 引脚的 pinctrl 信息。
②、在设备树中创建蜂鸣器节点,在蜂鸣器节点中加入 GPIO 信息。
③、编写驱动程序和测试 APP,和上一篇《pinctrl 和 gpio 子系统实验-基于正点原子IMX6ULL开发板》LED 驱动程序和测试 APP 基本一样
2 硬件原理图分析
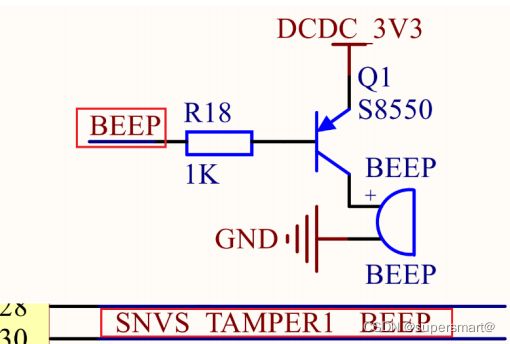
2 硬件原理图分析
3 实验程序编写
3.1 修改设备树文件
1、添加 pinctrl 节点
I.MX6U-ALPHA开发板上的BEEP使用了SNVS_TAMPER1这个PIN,打开imx6ull-alientek-emmc.dts,在 iomuxc 节点的 imx6ul-evk 子节点下创建一个名为“pinctrl_beep”的子节点,节点 内容如下所示:
pinctrl_beep: beepprp{
fsl,pins = <
MX6ULL_PAD_SNVS_TAMPER1__GPIO5_IO01 0x10b0
>;
}; 第 3 行,将 SNVS_TAMPER1 这 个 PIN 复用为 GPIO5_IO01。
2、添加 BEEP 设备节点
在根节点“/”下创建 BEEP 节点,节点名为“ beep ”,节点内容如下:
beep{
compatible = "alientek,beep";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_beep>;
beep-gpios = <&gpio5 1 GPIO_ACTIVE_HIGH>;
status= "okay";
}; 第 4 行, pinctrl-0 属性设置蜂鸣器所使用的 PIN 对应的 pinctrl 节点。
第 5 行, beep-gpio 属性指定了蜂鸣器所使用的 GPIO 。
3 、检查 PIN 是否被其他外设使用
先检查 PIN 为 SNVS_TAMPER1 这个 PIN 有没有被其他的 pinctrl 节点使用,如果有使用的话就要屏蔽掉。
再检查GPIO5_IO01 这个 GPIO 有没有被其他外设使用,如果有的话也要屏蔽掉。
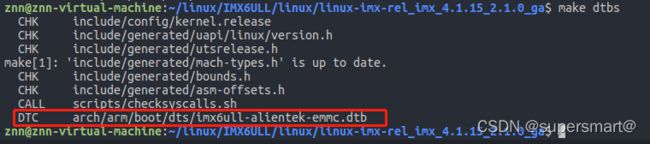
编译设备树
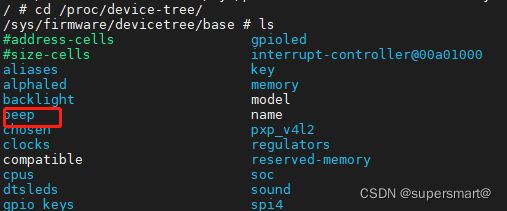
然后使用新编译出来的 imx6ull-alientek-emmc.dtb 文件启动 Linux 系统,进入“/proc/device-tree”目录中查看“beep”节点是否存在

3.2 蜂鸣器驱动程序编写
3.2 蜂鸣器驱动程序编写
新建vscode工程,工程创建好以后新建 beep.c 文件,在 beep.c 里面输入如下内容:
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define BEEP_CNT 1
#define BEEP_NAME "beep"
#define BEEPOFF 0
#define BEEPON 1
/*beep 设备结构体*/
struct beep_dev
{
dev_t devid;
int major;
int minor;
struct cdev cdev;
struct class *class;
struct device *device;
struct device_node *nd;
int beep_gpio;
};
struct beep_dev beep; /*BEEP*/
static int beep_open(struct inode *inode, struct file *filp)
{
filp->private_data = &beep;
return 0;
}
static int beep_release(struct inode *inode, struct file *filp)
{
return 0;
}
static ssize_t beep_write(struct file *filp, const char __user *buf,
size_t count, loff_t *ppos)
{
int ret;
unsigned char databuf[1];
struct beep_dev *dev = filp->private_data; //得到私有数据就是得到beep结构体
ret = copy_from_user(databuf, buf, count);
if (ret < 0)
{
return -EFAULT;
}
if (databuf[0] == BEEPON)
{
gpio_set_value(dev->beep_gpio, 0); //打开蜂鸣器,低电平
}
else if (databuf[0] == BEEPOFF)
{
gpio_set_value(dev->beep_gpio, 1); //关闭蜂鸣器,高电平
}
return 0;
}
/*操作集*/
static const struct file_operations beep_fops = {
.owner = THIS_MODULE,
.write = beep_write,
.open = beep_open,
.release = beep_release,
};
/*驱动入口函数*/
static int __init beep_init(void)
{
int ret = 0;
/***********注册字符设备驱动 **************/
/* 1、创建设备号 */
beep.major = 0;
if (beep.major)
{ /*给定主设备号*/
beep.devid = MKDEV(beep.major, 0);
ret = register_chrdev_region(beep.devid, BEEP_CNT, "BEEP_NAME");
}
else
{
ret = alloc_chrdev_region(&beep.devid, 0, BEEP_CNT, "BEEP_NAME");
beep.major = MAJOR(beep.devid);
beep.minor = MINOR(beep.devid);
}
if (ret < 0)
{
goto fail_devid;
}
printk("beep major =%d, minor =%d \r\n", beep.major, beep.minor);
/*2,初始化cdev*/
beep.cdev.owner = THIS_MODULE;
cdev_init(&beep.cdev, &beep_fops);
/*3,添加cdev*/
ret = cdev_add(&beep.cdev, beep.devid, BEEP_CNT);
if (ret)
goto fail_cdevadd;
/*4,创建类*/
beep.class = class_create(THIS_MODULE, BEEP_NAME);
if (IS_ERR(beep.class))
{
ret = PTR_ERR(beep.class);
goto fail_class;
}
/*5,创建设备*/
beep.device = device_create(beep.class, NULL, beep.devid, NULL, BEEP_NAME);
if (IS_ERR(beep.device))
{
ret = PTR_ERR(beep.device);
goto fail_device;
}
/**************设置 BEEP 所使用的 GPIO ***************/
/* 1、获取设备节点:beep */
beep.nd = of_find_node_by_path("/beep");
if (beep.nd == NULL)
{
ret = -EINVAL;
goto fail_nd;
}
/* 2、 获取设备树中的 gpio 属性,得到 BEEP 所使用的 GPIO 编号 */
beep.beep_gpio = of_get_named_gpio(beep.nd, "beep-gpios", 0);
if (beep.beep_gpio < 0)
{
ret = -EINVAL;
goto fail_nd;
}
/*3,申请BEEP所使用的GPIO引脚*/
ret = gpio_request(beep.beep_gpio, "beep-gpio");
if (ret)
{
printk("Can't request beep gpio \r\n");
goto fail_nd;
}
/* 4、设置 GPIO5_IO01 为输出,并且输出高电平,默认关闭 BEEP */
ret = gpio_direction_output(beep.beep_gpio, 0);
if (ret < 0)
{
goto fail_set;
}
/*5,输出低电平,关闭BEEP*/
gpio_set_value(beep.beep_gpio, 0);
return 0;
fail_set:
gpio_free(beep.beep_gpio);
fail_nd:
device_destroy(beep.class, beep.devid);
fail_device:
class_destroy(beep.class);
fail_class:
cdev_del(&beep.cdev);
fail_cdevadd:
unregister_chrdev_region(beep.devid, BEEP_CNT);
fail_devid:
return ret;
}
/*驱动出口函数*/
static void __exit beep_exit(void)
{
/*关闭蜂鸣器*/
gpio_set_value(beep.beep_gpio, 1);
/*注销字符设备驱动*/
cdev_del(&beep.cdev);
unregister_chrdev_region(beep.devid, BEEP_CNT);
device_destroy(beep.class, beep.devid);
class_destroy(beep.class);
gpio_free(beep.beep_gpio);
}
module_init(beep_init);
module_exit(beep_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("supersmart"); 3.3 编写测试 APP
新建名为 beepAPP.c 的文件,同以前实验ledAPP.c 内容基本一样,然后输入如下所示内容:
#include
#include
#include
#include
#include
#include
#include
/*
*argc:应用程序参数个数
* argv[]:具体的参数内容,字符串形式
* ./beepAPP <0:1> 0 关蜂鸣器,1 开蜂鸣器
* ./beepAPP /dev/beep 0 关蜂鸣器
* ./beepAPP /dev/beep 1 开蜂鸣器
*/
#define BEEPOFF 0
#define BEEPON 1
int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
unsigned char databuf[1];
if (argc != 3)
{
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if (fd < 0)
{
printf("file %s open failed!\r\n", filename);
return -1;
}
databuf[0] = atoi(argv[2]); /*将字符转化为数字*/
retvalue = write(fd, databuf, sizeof(databuf));
if (retvalue < 0)
{
printf("BEEP Control Failed ! \r\n");
close(fd);
return -1;
}
close(fd);
return 0;
}
4 运行测试
4.1 编译驱动程序和测试 APP
1、编译驱动程序
编写 Makefile 文件
4.1 编译驱动程序和测试 APP
1、编译驱动程序
编写 Makefile 文件
KERNELDIR := /home/znn/linux/IMX6ULL/linux/linux-imx-rel_imx_4.1.15_2.1.0_ga
CURRENT_PAHT := $(shell pwd)
obj-m := beep.o
build :kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PAHT) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PAHT) clean编译驱动模块

2、编译测试 APP
使用以下命令编译生成beepAPP这个应用程序。
使用以下命令编译生成beepAPP这个应用程序。
arm-linux-gnueabihf-gcc beepAPP.c -o beepAPP![]()
4.2 运行测试
将beep.ko 和 beepApp 这两个文件拷贝到 rootfs/lib/modules/4.1.15 目录中。

重启开发板,进入到目录 lib/modules/4.1.15 中,输入如下命令加载 beep.ko 驱动模块:
![]()
打开蜂鸣器,蜂鸣器鸣叫
![]()
关闭蜂鸣器,蜂鸣器停止鸣叫
![]()
卸载驱动
