matlab实现纯跟踪算法
对《Pure Pursuit纯跟踪算法Python/Matlab算法实现》该博客matlab算法提升:
该博客链接:https://blog.csdn.net/gophae/article/details/102761138
该博客算法跑的效果:
- 路径没有完整跟下来,可以看出尾部少一块

我在该博客提供算法的基础上做了改进:
下面展示一些 内联代码片。
// An highlighted block
k = 0.1; % look forward gain
Lfc = 1; % look-ahead distance
Kp = 1.0 ; % speed propotional gain
dt = 0.1 ;% [s]
L = 2.9 ;% [m] wheel base of vehicle
cx = 0:0.1:50;
cx = cx';
for i = 1:length(cx)
cy(i) = sin(cx(i)/5)*cx(i)/2; %曲线函数
% cy(i)=(3.75/(3.^5))*(6*i.^5-15*3*i.^4+10*3^2*i.^3);
% cy(i) = i;
end
i = 1;
target_speed = 3;
T = 80;
lastIndex = length(cx); %lastIndex=501
x = 0; y = -3; yaw = 0; v = 2; %初始状态
time = 0;
Lf = k * v + Lfc; %相当于预瞄距离
figure
while T > time
[target_ind,~]= calc_target_index(x,y,cx,cy,Lf) %找到预瞄点
ai = PIDcontrol(target_speed, v,Kp); %pid控速度
[~,After_Lf]= calc_target_index(x,y,cx,cy,Lf)
di = pure_pursuit_control(x,y,yaw,v,cx,cy,target_ind,k,Lfc,L,After_Lf);
[x,y,yaw,v] = update(x,y,yaw,v, ai, di,dt,L)
time = time + dt;
pause(0.05)
plot(cx,cy,'b',x,y,'r-*')
drawnow
hold on
end
function [x, y, yaw, v] = update(x, y, yaw, v, a, delta,dt,L) %更新状态
x = x + v * cos(yaw) * dt;
y = y + v * sin(yaw) * dt;
yaw = yaw + v / L * tan(delta) * dt;
v = v + a * dt;
end
function [a] = PIDcontrol(target_v, current_v, Kp)
a = Kp * (target_v - current_v);
end
function [delta] = pure_pursuit_control(x,y,yaw,v,cx,cy,ind,k,Lfc,L,Lf) %纯跟踪
tx = cx(ind);
ty = cy(ind);
%alpha = atan((ty-y)/(tx-x))-yaw; %实际点的夹角-航向角
alpha=atan2((ty-y),(tx-x))-yaw;
%预瞄距离
delta = atan(2*L * sin(alpha)/Lf) ;
end
function [ind,After_Lf] = calc_target_index(x,y, cx,cy,Lf) %找到最近的那个
N = length(cx); %N=501
Distance = zeros(N,1);
for i = 1:N
Distance(i) = sqrt((cx(i)-x)^2 + (cy(i)-y)^2);
end
[distance, location]= min(Distance);
ind = location; %第几个数
Relative_distance=distance; %实际的数
% LL = 0;
% while Lf > LL && (ind + 1) < length(cx)
% dx = cx(ind + 1 )- cx(ind);
% dy = cx(ind + 1) - cx(ind);
% LL = LL + sqrt(dx * 2 + dy * 2);
% ind = ind + 1;
% end
%
h=sqrt(Lf^2-Relative_distance^2);
sum=0;
z=1;
while z<(length(cx)-ind-1)
sum=sum+sqrt((cx(ind+z+1)-cx(ind+z))^2+(cy(ind+z+1)-cy(ind+z))^2);
z=z+1;
if (sum>=h)
break;
end
end
After_Lf=sqrt(sum^2+Relative_distance^2);
% if After_Lf>=3
% After_Lf=3
% else
% After_Lf=After_Lf
% end
ind=z+ind;
end
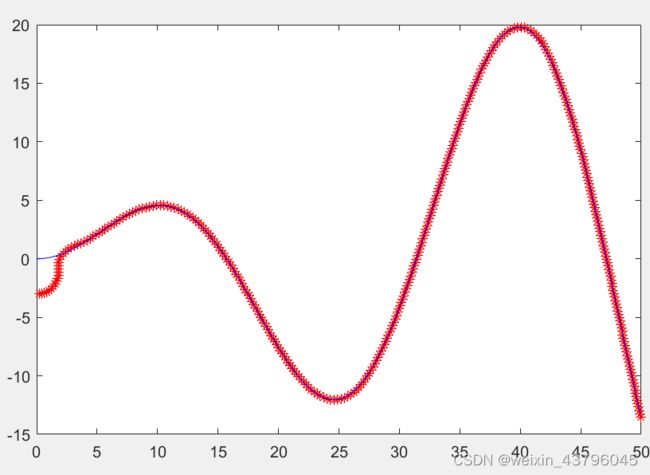
实现效果: