基于树莓派的智能家居控制系统设计
基于树莓派的智能家居控制系统设计
完整文件下载
基于树莓派的智能家居控制系统设计
https://download.csdn.net/download/G1842965496/85802405
论文参考:基于树莓派的智能家居控制系统论文参考
https://blog.csdn.net/G1842965496/article/details/130071066
一、功能介绍
1.通过手机APP、语音识别等控制家电,对门锁,灯光、电风扇等设备进行控制,开发回家模式,睡觉模式等应用场景。
2.通过视频监控、火灾报警、震动报警和人体感应报警保证家居的安全。
3.将温湿度检测数据和家居安防状况实时同步到用户的手机APP进行显示。
4.遥控控制可以保证在没有网络的情况下也可以对家居进行控制。
5.通过翔云平台提供的人脸对比服务完成人脸识别开锁
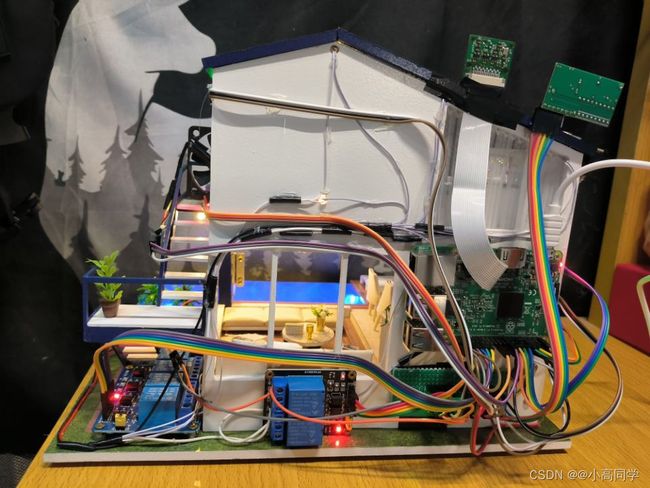
二、实物展示
1.家居模型实物



2.部分功能展示
手机APP
火灾测试
火灾报警
视频监控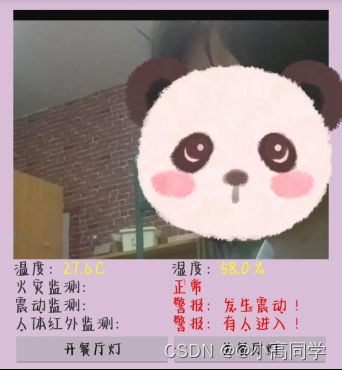
温湿度检测
人脸识别按钮
人脸识别开锁
三、程序(手机APP程序过多不展示)
1.主程序mainPro.c
#include 2.摄像头camera.c
//摄像头
#include "contrlDevices.h"
#include 3.外设设备的头文件contrlDevices.h
//外设设备的头文件
#include 4.控制的头文件inputCommand.h
//控制的头文件
#include 5.语音模块voiceContrl.c
//语音控制设备
#include 6.蜂鸣器buzzser.c
//蜂鸣器
#include "contrlDevices.h"
int buzzerOpen(int pinNum)
{
digitalWrite(pinNum, LOW);
}
int buzzerClose(int pinNum)
{
digitalWrite(pinNum, HIGH);
}
int buzzerInit(int pinNum)
{
pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, HIGH);
printf("蜂鸣器初始化成功\n");
}
struct Devices buzzer = {
.deviceName = "buzzser",
.pinNum = 7,
.open = buzzerOpen,
.close = buzzerClose,
.deviceInit = buzzerInit};
struct Devices *addBuzzerToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &buzzer;
}
else
{
buzzer.next = phead;
phead = &buzzer;
}
return phead;
}
7.电风扇fan.c
//电风扇
#include "contrlDevices.h"
int fanOpen(int pinNum)
{
// pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, LOW);
}
int fanClose(int pinNum)
{
// pinMode(pinNum, INPUT);
digitalWrite(pinNum, HIGH);
}
int fanCloseInit(int pinNum)
{
// pinMode(pinNum, INPUT);
pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, HIGH);
//printf("电风扇初始化成功\n");
}
int fanCloseStatus(int status)
{
}
struct Devices fan = {
//.deviceName = "fan",
.deviceName = "fan",
.pinNum = 26,
.open = fanOpen,
.close = fanClose,
.deviceInit = fanCloseInit,
.changStatus = fanCloseStatus};
struct Devices *addFanToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &fan;
}
else
{
fan.next = phead;
phead = &fan;
}
return phead;
}
8.人体红外检测human.c
//人体红外检测
#include "contrlDevices.h"
int humanInit(int pinNum)
{
pinMode(pinNum, INPUT);
digitalWrite(pinNum, HIGH);
// printf("人体感应传感器初始化成功\n");
}
int readhumanStatus(int pinNum)
{
return digitalRead(pinNum);
}
struct Devices human = {
.deviceName = "human",
.pinNum = 5,
.deviceInit = humanInit,
.readStatus = readhumanStatus};
struct Devices *addHumanToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &human;
}
else
{
human.next = phead;
phead = &human;
}
return phead;
}
9.火焰传感器fire.c
//火焰传感器
#include "contrlDevices.h"
int fireInit(int pinNum)
{
pinMode(pinNum, INPUT);
digitalWrite(pinNum, HIGH);
}
int readFireStatus(int pinNum)
{
return digitalRead(pinNum);
}
struct Devices fire = {
.deviceName = "fire",
.pinNum = 25,
.deviceInit = fireInit,
.readStatus = readFireStatus};
struct Devices *addFireToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &fire;
}
else
{
fire.next = phead;
phead = &fire;
}
return phead;
}
10.震动传感器shake.c
//震动传感器
#include "contrlDevices.h"
int shakeInit(int pinNum)
{
pinMode(pinNum, INPUT);
digitalWrite(pinNum, HIGH);
}
int readShakeStatus(int pinNum)
{
return digitalRead(pinNum);
}
struct Devices shake = {
.deviceName = "shake",
.pinNum = 1,
.deviceInit = shakeInit,
.readStatus = readShakeStatus};
struct Devices *addShakeToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &shake;
}
else
{
shake.next = phead;
phead = &shake;
}
return phead;
}
11.服务器socketContrl.c
// socket控制
#include 12.客服端(wemos做服务器)client_wemos.c
//树莓派作为客服端 连接wemos D1服务器
#include 13.浴室灯bathroomLight.c
//浴室灯
#include "contrlDevices.h"
int bathroomLightOpen(int pinNum)
{
digitalWrite(pinNum, LOW);
}
int bathroomLightClose(int pinNum)
{
digitalWrite(pinNum, HIGH);
}
int bathroomLightCloseInit(int pinNum)
{
pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, HIGH);
// printf("浴室灯初始化成功\n");
}
int bathroomLightCloseStatus(int status)
{
}
struct Devices bathroomLight = {
//.deviceName = "bathroomLight",
.deviceName = "yu",
.pinNum = 24,
.open = bathroomLightOpen,
.close = bathroomLightClose,
.deviceInit = bathroomLightCloseInit,
.changStatus = bathroomLightCloseStatus};
struct Devices *addBathroomLightToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &bathroomLight;
}
else
{
bathroomLight.next = phead;
phead = &bathroomLight;
}
return phead;
}
14.门锁doorLock.c
//门锁
#include "contrlDevices.h"
int doorLockOpen(int pinNum)
{
digitalWrite(pinNum, LOW);
}
int doorLockClose(int pinNum)
{
digitalWrite(pinNum, HIGH);
}
int doorLockCloseInit(int pinNum)
{
pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, HIGH);
// printf("门锁初始化成功\n");
}
int doorLockCloseStatus(int status)
{
}
struct Devices doorLock = {
//.deviceName = "doorLock",
.deviceName = "lock",
.pinNum = 29,
.open = doorLockOpen,
.close = doorLockClose,
.deviceInit = doorLockCloseInit,
.changStatus = doorLockCloseStatus};
struct Devices *addDoorLockToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &doorLock;
}
else
{
doorLock.next = phead;
phead = &doorLock;
}
return phead;
}
15.卧室灯livingroomLigth.c
//卧室灯
#include "contrlDevices.h"
int livingroomLightOpen(int pinNum)
{
digitalWrite(pinNum, LOW);
}
int livingroomLightClose(int pinNum)
{
digitalWrite(pinNum, HIGH);
}
int livingroomLightCloseInit(int pinNum)
{
pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, HIGH);
// printf("卧室灯初始化成功\n");
}
int livingroomLightCloseStatus(int status)
{
}
struct Devices livingroomLight = {
//.deviceName = "livingroomLight",
.deviceName = "shui",
.pinNum = 21,
.open = livingroomLightOpen,
.close = livingroomLightClose,
.deviceInit = livingroomLightCloseInit,
.changStatus = livingroomLightCloseStatus};
struct Devices *addlivingroomLightToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &livingroomLight;
}
else
{
livingroomLight.next = phead;
phead = &livingroomLight;
}
return phead;
}
16.泳池灯poolLight.c
//泳池灯
#include "contrlDevices.h"
int poolLightOpen(int pinNum)
{
digitalWrite(pinNum, LOW);
}
int poolLightClose(int pinNum)
{
digitalWrite(pinNum, HIGH);
}
int poolLightCloseInit(int pinNum)
{
pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, HIGH);
// printf("泳池灯初始化成功\n");
}
int poolLightCloseStatus(int status)
{
}
struct Devices poolLight = {
//.deviceName = "poolLight",
.deviceName = "yong",
.pinNum = 27,
.open = poolLightOpen,
.close = poolLightClose,
.deviceInit = poolLightCloseInit,
.changStatus = poolLightCloseStatus};
struct Devices *addpoolLightToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &poolLight;
}
else
{
poolLight.next = phead;
phead = &poolLight;
}
return phead;
}
17.餐厅灯restaurantLight.c
//餐厅灯
#include "contrlDevices.h"
int restaurantLightOpen(int pinNum)
{
digitalWrite(pinNum, LOW);
}
int restaurantLightClose(int pinNum)
{
digitalWrite(pinNum, HIGH);
}
int restaurantLightCloseInit(int pinNum)
{
pinMode(pinNum, OUTPUT);
digitalWrite(pinNum, HIGH);
// printf("餐厅灯初始化成功\n");
}
int restaurantLightCloseStatus(int status)
{
}
struct Devices restaurantLight = {
//.deviceName = "restaurantLight",
.deviceName = "chu",
.pinNum = 23,
.open = restaurantLightOpen,
.close = restaurantLightClose,
.deviceInit = restaurantLightCloseInit,
.changStatus = restaurantLightCloseStatus};
struct Devices *addrestaurantLightToDeviceLink(struct Devices *phead)
{
if (phead == NULL)
{
return &restaurantLight;
}
else
{
restaurantLight.next = phead;
phead = &restaurantLight;
}
return phead;
}
18.客厅灯upstairLight.c
//客厅灯
#include 19.视频监控脚本start_web_video.sh
cd ../mjpg-streamer/mjpg-streamer-experimental/
./mjpg_streamer -i "./input_raspicam.so" -o "./output_http.so -w ./www"