三相三线制逆变器的dq解耦控制
1. 三相三线制逆变器拓扑
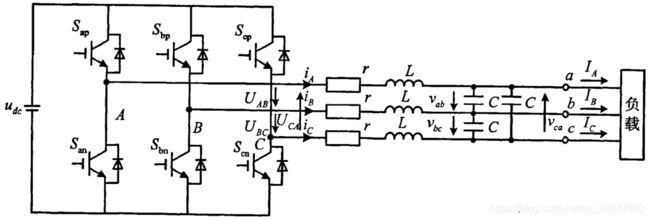
三相三线制逆变器的拓扑如下图所示,其中开关变换器的端口线电压是 U A B U_{AB} UAB, U B C U_{BC} UBC和 U C A U_{CA} UCA,负载线电压是 v a b v_{ab} vab, v b c v_{bc} vbc和 v c a v_{ca} vca,滤波电容为三角形连接,如果变成星型连接,则容值变成3C。假设负载是星型连接,且三相负载的连接点是O点,则可认为三相星型连接电容和三相星型连接负载处于并联状态,便于后面的简化与建模,假定O点是参考电位点,则 U A U_A UA和 v a v_a va分别是A相的端口相电压和负载相电压,而且后面的dq变换都是针对相电压进行的。
2. 建模
2.1 三相dq变换
三相dq变换和单相dq变换类似,都是包含很多种形式,主要是在 s i n θ sin\theta sinθ, c o s θ cos\theta cosθ, − s i n θ -sin\theta −sinθ, − c o s θ -cos\theta −cosθ之间进行切换,其中进行dq变换以及dq求导变换时,应该将 θ \theta θ看做 w t wt wt。MATLAB中常用的两种dq变换矩阵分别是
T a b c − d q = 2 3 [ c o s w t c o s ( w t − 2 π 3 ) c o s ( w t + 2 π 3 ) − s i n w t − s i n ( w t − 2 π 3 ) − s i n ( w t + 2 π 3 ) ] T_{abc-dq}= \frac{2}{3} \begin{bmatrix} coswt & cos(wt-\frac{2\pi}{3}) & cos(wt+\frac{2\pi}{3})\\ -sinwt & -sin(wt-\frac{2\pi}{3}) & -sin(wt+\frac{2\pi}{3}) \end{bmatrix} Tabc−dq=32[coswt−sinwtcos(wt−32π)−sin(wt−32π)cos(wt+32π)−sin(wt+32π)]
T a b c − d q = 2 3 [ s i n w t s i n ( w t − 2 π 3 ) s i n ( w t + 2 π 3 ) c o s w t c o s ( w t − 2 π 3 ) c o s ( w t + 2 π 3 ) ] T_{abc-dq}= \frac{2}{3} \begin{bmatrix} sinwt & sin(wt-\frac{2\pi}{3}) & sin(wt+\frac{2\pi}{3})\\ coswt & cos(wt-\frac{2\pi}{3}) & cos(wt+\frac{2\pi}{3}) \end{bmatrix} Tabc−dq=32[sinwtcoswtsin(wt−32π)cos(wt−32π)sin(wt+32π)cos(wt+32π)]
这两个矩阵均满足 T a b c − d q d i a b c d t = [ d i d d t d i q d t ] − w [ i q − i d ] T_{abc-dq}\frac{d_{iabc}}{d_t}= \begin{bmatrix} \frac{d_{id}}{d_t}\\ \frac{d_{iq}}{d_t} \end{bmatrix} -w \begin{bmatrix} i_q\\ -i_d \end{bmatrix} Tabc−dqdtdiabc=[dtdiddtdiq]−w[iq−id]
所以最终dq解耦控制的表达式是一致的。
2.2三相逆变器数学模型
2.2.1 电压模型
三相逆变器的时域模型如下:
[ v a v b v c ] = [ U A U B U C ] − [ r ∗ i A r ∗ i B r ∗ i C ] − L [ d i A d t d i B d t d i C d t ] \begin{bmatrix} v_a\\ v_b\\ v_c \end{bmatrix}= \begin{bmatrix} U_A\\ U_B\\ U_C \end{bmatrix}- \begin{bmatrix} r*i_A\\ r*i_B\\ r*i_C \end{bmatrix}-L \begin{bmatrix} \frac{d_{iA}}{d_t}\\ \frac{d_{iB}}{d_t}\\ \frac{d_{iC}}{d_t} \end{bmatrix} ⎣⎡vavbvc⎦⎤=⎣⎡UAUBUC⎦⎤−⎣⎡r∗iAr∗iBr∗iC⎦⎤−L⎣⎢⎡dtdiAdtdiBdtdiC⎦⎥⎤
将其进行dq变换,可得:
T a b c − d q [ v a v b v c ] = T a b c − d q [ U A U B U C ] − T a b c − d q [ r ∗ i A r ∗ i B r ∗ i C ] − T a b c − d q L [ d i A d t d i B d t d i C d t ] T_{abc-dq}\begin{bmatrix} v_a\\ v_b\\ v_c \end{bmatrix}= T_{abc-dq}\begin{bmatrix} U_A\\ U_B\\ U_C \end{bmatrix}- T_{abc-dq}\begin{bmatrix} r*i_A\\ r*i_B\\ r*i_C \end{bmatrix}-T_{abc-dq}L \begin{bmatrix} \frac{d_{iA}}{d_t}\\ \frac{d_{iB}}{d_t}\\ \frac{d_{iC}}{d_t} \end{bmatrix} Tabc−dq⎣⎡vavbvc⎦⎤=Tabc−dq⎣⎡UAUBUC⎦⎤−Tabc−dq⎣⎡r∗iAr∗iBr∗iC⎦⎤−Tabc−dqL⎣⎢⎡dtdiAdtdiBdtdiC⎦⎥⎤
上式中一共四项,其中前三相就是简单的dq变换,但是最后一项的dq变换涉及到导数的dq变换,需要进行处理。
T a b c − d q [ i A i B i C ] = [ i d i q ] T_{abc-dq}\begin{bmatrix} i_A\\ i_B\\ i_C \end{bmatrix}= \begin{bmatrix} i_d\\ i_q\\ \end{bmatrix} Tabc−dq⎣⎡iAiBiC⎦⎤=[idiq]
[ d i d d t d i q d t ] = d T a b c − d q i a b c d t = T a b c − d q d i A B C d t + i A B C d T a b c − d q d t \begin{bmatrix} \frac{d_{id}}{d_t}\\ \frac{d_{iq}}{d_t} \end{bmatrix} = \frac{d_{{T_{abc-dq}}i_{abc}}}{d_t}= T_{abc-dq}\frac{d_{iABC}}{d_t}+i_{ABC}\frac{d_{T_{abc-dq}}}{d_t} [dtdiddtdiq]=dtdTabc−dqiabc=Tabc−dqdtdiABC+iABCdtdTabc−dq
T a b c − d q d i A B C d t = T a b c − d q [ d i A d t d i B d t d i C d t ] T_{abc-dq}\frac{d_{iABC}}{d_t}=T_{abc-dq} \begin{bmatrix} \frac{d_{iA}}{d_t}\\ \frac{d_{iB}}{d_t}\\ \frac{d_{iC}}{d_t} \end{bmatrix} Tabc−dqdtdiABC=Tabc−dq⎣⎢⎡dtdiAdtdiBdtdiC⎦⎥⎤
T a b c − d q d i A B C d t = [ d i d d t d i q d t ] − w [ i q − i d ] T_{abc-dq}\frac{d_{iABC}}{d_t}= \begin{bmatrix} \frac{d_{id}}{d_t}\\ \frac{d_{iq}}{d_t} \end{bmatrix} -w \begin{bmatrix} i_q\\ -i_d \end{bmatrix} Tabc−dqdtdiABC=[dtdiddtdiq]−w[iq−id]
经过上面的计算,可以得出:
[ v d v q ] = [ U d U q ] − r [ i d i q ] − L [ d i d d t d i q d t ] + ω L [ i q − i d ] \begin{bmatrix} v_d\\ v_q\\ \end{bmatrix}= \begin{bmatrix} U_d\\ U_q\\ \end{bmatrix}-r \begin{bmatrix} i_d\\ i_q\\ \end{bmatrix}-L \begin{bmatrix} \frac{d_{id}}{d_t}\\ \frac{d_{iq}}{d_t}\\ \end{bmatrix}+ \omega L \begin{bmatrix} i_q\\ -i_d\\ \end{bmatrix} [vdvq]=[UdUq]−r[idiq]−L[dtdiddtdiq]+ωL[iq−id]
且可以证明,两种dq变换均满足这个表达式。可以发现,这个表达式和之前推导的三相整流器的dq解耦表达式不一致,这是由于电感电流的正方向和之前推导的相反,此处是变换器流向电网。
2.2.2 电流模型
将三角形连接的电容转换成星型连接后,容值变成3C。根据KCL方程可以列出:
3 C [ d v a d t d v b d t d v c d t ] = [ i A i B i C ] − [ I A I B I C ] 3C\begin{bmatrix} \frac{d_{va}}{d_t}\\ \frac{d_{vb}}{d_t}\\ \frac{d_{vc}}{d_t} \end{bmatrix}= \begin{bmatrix} i_A\\ i_B\\ i_C \end{bmatrix}- \begin{bmatrix} I_A\\ I_B\\ I_C \end{bmatrix} 3C⎣⎢⎡dtdvadtdvbdtdvc⎦⎥⎤=⎣⎡iAiBiC⎦⎤−⎣⎡IAIBIC⎦⎤
经过dq变换之后,可得:
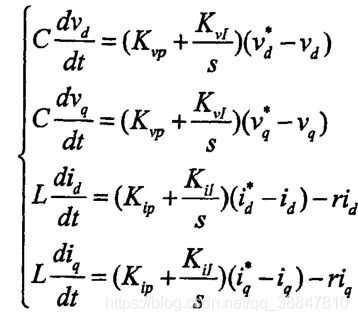
C [ d v d d t d v q d t ] = ω C [ v q − v d ] + 1 3 [ i d i q ] − 1 3 [ I d I q ] C\begin{bmatrix} \frac{d_{vd}}{d_t}\\ \frac{d_{vq}}{d_t}\\ \end{bmatrix}= \omega C \begin{bmatrix} v_q\\ -v_d\\ \end{bmatrix}+\frac{1}{3} \begin{bmatrix} i_d\\ i_q\\ \end{bmatrix}-\frac{1}{3} \begin{bmatrix} I_d\\ I_q\\ \end{bmatrix} C[dtdvddtdvq]=ωC[vq−vd]+31[idiq]−31[IdIq]
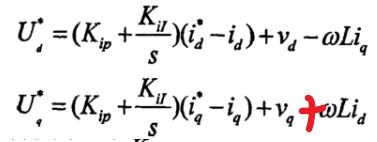
3. dq解耦控制
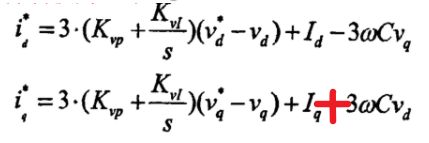
建立完数学模型之后,若采用PI控制,则只需要将dq变换后的表达式中的求导项替换成PI表达式即可。值得注意的是,由于滤波电容是三角形连接,所以电压环中耦合项用的是3C, 但是如果换成星型连接,则耦合项中用的是C。也就是说三角形连接的电容C,等效成星型连接的3C,而我们分析控制系统时是根据星型连接来做的。
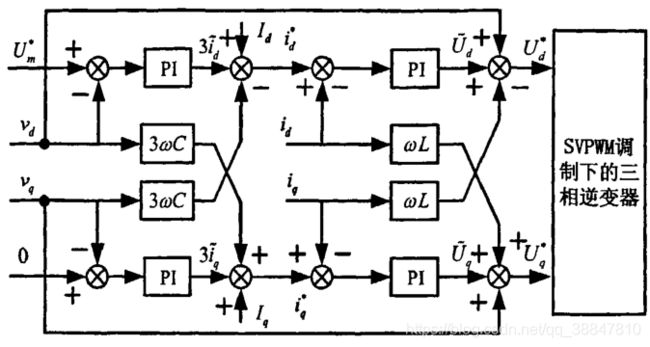 综上所述,逆变器负载电压的电压环输出为电感电流的目标值,而电感电流的电流环输出是端口电压的目标值,将端口电压进行调制,就会得到开关信号。其实体现的就是预测控制的思想。
综上所述,逆变器负载电压的电压环输出为电感电流的目标值,而电感电流的电流环输出是端口电压的目标值,将端口电压进行调制,就会得到开关信号。其实体现的就是预测控制的思想。
参考资料
三相逆变器输出电压不平衡的控制研究