基于自适应暗原色的单幅图像去雾算法代码复现
基于自适应暗原色的单幅图像去雾算法代码复现
- 前言
- 一、原文
- 二、代码
- 三、实验效果
-
- (1)透射率对比
- (2)PSNR与SSIM
- 说明
前言
大学四年快毕业了,准备把大学期间做的一些东西给写一下,感兴趣的可以持续关注。
提示:以下是本篇文章正文内容,下面案例可供参考
一、原文

算法原理可以直接在论文中看,论文好像没有给出代码,所以我自己复现了一下,但没有达到论文中的优秀效果。
二、代码
环境是OpenCV,C++,软件用的VS 2022
/*自适应暗通道*/
#include 三、实验效果
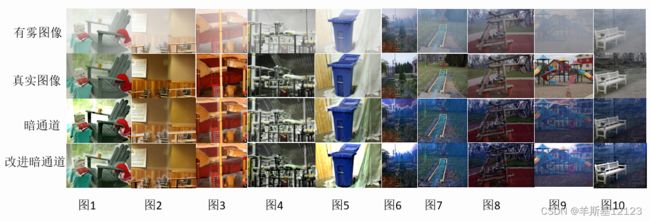
(1)透射率对比
图片是改进前的算法与本文算法对比


有效果,但没有原文中的那么优越。
(2)PSNR与SSIM
图片来源于两个图片数据集,可以从以下链接获取


说明
使用代码请注明出处。