Cordic的学习之硬件实现
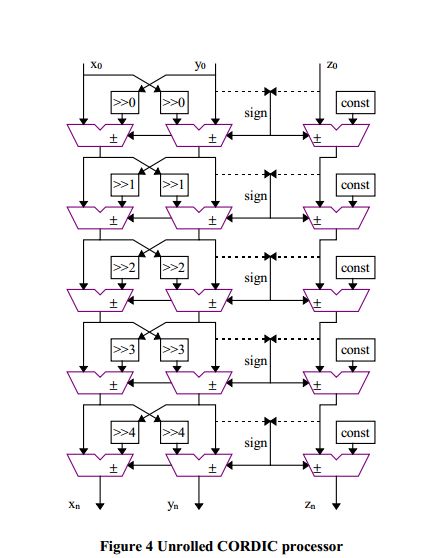
上图为实现Cordic的原理框图。CORDIC的实现可以采用迭代的方式实现,这意味着CORDIC会执行一次迭代n次。CORDIC可以展开实现,即上图的结构,每一个部分处理相同的迭代,执行一次迭代一次。
1 `timescale 1ns / 1ps 2 module Cordic_t1(clk,rst_n,ena,phase_in,sin_out,cos_out,eps); 3 4 input clk; 5 input rst_n; 6 input ena; 7 8 //输入的角度采用16位表示 9 //最高位表示符号位,1为负数。0为正数 10 //接下来的7位,表示角度的整数,可表示范围为0--127 11 //最后的8位,表示小数。可表示范围为0--1 12 input [15:0] phase_in;//16位 13 reg [15:0] phase_in_reg; 14 15 //最高位为符号位,剩下15位为数据位 16 output [15:0] sin_out; //17位 17 output [15:0] cos_out; 18 19 output [15:0] eps; //最后的相角 20 21 reg [15:0] sin_out; 22 reg [15:0] cos_out; 23 reg [15:0] eps; 24 25 //七次迭代的中间存储 26 reg [15:0] x0,y0,z0; 27 reg [15:0] x1,y1,z1; 28 reg [15:0] x2,y2,z2; 29 reg [15:0] x3,y3,z3; 30 reg [15:0] x4,y4,z4; 31 reg [15:0] x5,y5,z5; 32 reg [15:0] x6,y6,z6; 33 reg [15:0] x7,y7,z7; 34 35 //初始化 36 always @(posedge clk or negedge rst_n) 37 begin 38 if(!rst_n) 39 begin 40 x0<=16'd0; 41 y0<=16'd0; 42 z0<=16'd0; 43 end 44 else 45 if(ena) 46 begin 47 x0 <= 16'd19898;//初始化 = 1/Kn = 1/1.6467=0.60725,量化成16bit表示 48 y0 <= 16'd0; 49 z0 <= phase_in_reg; 50 end 51 end 52 53 //level 1--迭代第一次,角度偏移45° 54 always @(posedge clk or negedge rst_n) 55 begin 56 if(!rst_n) 57 begin 58 x1<=16'd0; 59 y1<=16'd0; 60 z1<=16'd0; 61 end 62 else 63 if(ena) 64 if(z0[15]==1'b0) //di = 1 65 begin 66 x1 <= x0 - y0; 67 y1 <= y0 + x0; 68 z1 <= z0 - 16'd11520; //45deg 69 end 70 else 71 begin 72 x1 <= x0 + y0; 73 y1 <= y0 - x0; 74 z1 <= z0 + 16'd11520; //45deg 75 end 76 end 77 //level 2--迭代第二次,角度偏移26.56° 78 always@(posedge clk or negedge rst_n) 79 begin 80 if(!rst_n) 81 begin 82 x2<=16'b0; 83 y2<=16'b0; 84 z2<=16'b0; 85 end 86 else if(ena) 87 if(z1[15]==1'b0) 88 begin 89 x2 <= x1-{y1[15],y1[15:1]}; 90 y2 <= y1+{x1[15],x1[15:1]}; 91 z2 <= z1 - 16'b0_0010110_10001111; 92 end 93 else 94 begin 95 x2 <= x1+{y1[15],y1[15:1]}; 96 y2 <= y1-{x1[15],x1[15:1]}; 97 z2 <= z1 + 16'b0_0010110_10001111; 98 end 99 end 100 //level 3--迭代第三次,角度偏移14.04° 101 always@(posedge clk or negedge rst_n) 102 begin 103 if(!rst_n) 104 begin 105 x3<=16'b0; 106 y3<=16'b0; 107 z3<=16'b0; 108 end 109 else if(ena) 110 if(z2[15]==1'b0) 111 begin 112 x3 <= x2-{{2{y2[15]}},y2[15:2]}; 113 y3 <= y2+{{2{x2[15]}},x2[15:2]}; 114 z3 <= z2-16'b0_0001110_00001010; 115 end 116 else 117 begin 118 x3 <= x2+{{2{y2[15]}},y2[15:2]}; 119 y3 <= y2-{{2{x2[15]}},x2[15:2]}; 120 z3 <= z2+16'b0_0001110_00001010; 121 end 122 end 123 //leve 4--迭代第四次,角度偏移7.13° 124 always @(posedge clk or negedge rst_n) 125 begin 126 if(!rst_n) 127 begin 128 x4<=16'b0; 129 y4<=16'b0; 130 z4<=16'b0; 131 end 132 else if(ena) 133 if(z3[15]==1'b0) 134 begin 135 x4 <= x3-{{3{y3[15]}},y3[15:3]}; 136 y4 <= y3+{{3{x3[15]}},x3[15:3]}; 137 z4 <= z3-16'b0_0000111_00100001; 138 end 139 else 140 begin 141 x4 <= x3+{{3{y3[15]}},y3[15:3]}; 142 y4 <= y3-{{3{x3[15]}},x3[15:3]}; 143 z4 <= z3+16'b0_0000111_00100001; 144 end 145 end 146 147 //leve 5--迭代第五次,角度偏移3.58° 148 always @(posedge clk or negedge rst_n) 149 begin 150 if(!rst_n) 151 begin 152 x5<=16'b0; 153 y5<=16'b0; 154 z5<=16'b0; 155 end 156 else 157 if(ena) 158 if(z4[15]==1'b0) 159 begin 160 x5 <= x4 - {{4{y4[15]}},y4[15:4]}; 161 y5 <= y4 + {{4{x4[15]}},x4[15:4]}; 162 z5 <= z4 - 16'b0_0000011_10010100; //4deg 163 end 164 else 165 begin 166 x5 <= x4 + {{4{y4[15]}},y4[15:4]}; 167 y5 <= y4 - {{4{x4[15]}},x4[15:4]}; 168 z5 <= z4 + 16'b0_0000011_10010100; //4deg 169 end 170 end 171 172 //leve 6--迭代第6次,角度偏移1.79° 173 always @(posedge clk or negedge rst_n) 174 begin 175 if(!rst_n) 176 begin 177 x6<=16'b0; 178 y6<=16'b0; 179 z6<=16'b0; 180 end 181 else 182 if(ena) 183 if(z5[15]==1'b0) 184 begin 185 x6 <= x5 - {{5{y5[15]}},y5[15:5]}; 186 y6 <= y5 + {{5{x5[15]}},x5[15:5]}; 187 z6 <= z5 - 16'b0_0000001_11001010; //2deg 188 end 189 else 190 begin 191 x6 <= x5 + {{5{y5[15]}},y5[15:5]}; 192 y6 <= y5 - {{5{x5[15]}},x5[15:5]}; 193 z6 <= z5 + 16'b0_0000001_11001010; //2deg 194 end 195 end 196 //leve 7--迭代第7次,角度偏移0.9° 197 always @(posedge clk or negedge rst_n) 198 begin 199 if(!rst_n) 200 begin 201 x7<=16'b0; 202 y7<=16'b0; 203 z7<=16'b0; 204 end 205 else 206 if(ena) 207 if(z6[15]==1'b0) 208 begin 209 x7 <= x6 - {{6{y6[15]}},y6[15:6]}; 210 y7 <= y6 + {{6{x6[15]}},x6[15:6]}; 211 z7 <= z6 - 16'b0_0000000_11100110; 212 end 213 else 214 begin 215 x7 <= x6 + {{6{y6[15]}},y6[15:6]}; 216 y7 <= y6 - {{6{x6[15]}},x6[15:6]}; 217 z7 <= z6 + 16'b0_0000000_11100110; 218 end 219 end 220 always@(posedge clk or negedge rst_n) 221 if(!rst_n)begin 222 sin_out<=16'd0;; //17位 223 cos_out<=16'd0; 224 eps<=16'd0; 225 end 226 else 227 begin 228 sin_out<=x7; //17位 229 cos_out<=y7; 230 eps<=z7; 231 end 232 ////把相角象限范围限制在[0,pi/2] 233 //always @(posedge clk or negedge rst_n) 234 //begin 235 // if(!rst_n) 236 // phase_in_reg<=16'd0; 237 // else 238 // if(ena) 239 // begin 240 // case(phase_in[15:14]) 241 // 2'b00:phase_in_reg<=phase_in; 242 // 2'b01:phase_in_reg<=phase_in - 8'h40; //-pi/2 243 // 2'b10:phase_in_reg<=phase_in - 8'h80; //-pi 244 // 2'b11:phase_in_reg<=phase_in - 8'hc0; //-3pi/2 245 // default:; 246 // endcase 247 // end 248 //end 249 ////remain the quadrant information for 'duiqi' 250 //integer i; 251 //reg [1:0]quadrant[15:0]; 252 //always @(posedge clk or negedge rst_n) 253 //begin 254 // if(!rst_n) 255 // for(i=0; i<=15; i=i+1) 256 // quadrant[i]<=2'b00; 257 // else 258 // if(ena) 259 // begin 260 // for(i=0; i<15; i=i+1) 261 // quadrant[i+1]<=quadrant[i]; 262 // quadrant[0]<=phase_in[15:14]; 263 // end 264 //end 265 // 266 //always @(posedge clk or negedge rst_n) 267 //begin 268 // if(!rst_n) 269 // begin 270 // sin_out <= 16'd0; 271 // cos_out <= 16'd0; 272 // eps <= 16'd0; 273 // end 274 // else 275 // if(ena) 276 // case(quadrant[15]) 277 // 2'b00:begin 278 // sin_out <= y6; 279 // cos_out <= x6; 280 // eps <= z6; 281 // end 282 // 2'b01:begin 283 // sin_out <= x6; 284 // cos_out <= ~(y6) + 1'b1; 285 // eps <= z6; 286 // end 287 // 2'b10:begin 288 // sin_out <= ~(y6) + 1'b1; 289 // cos_out <= ~(x6) + 1'b1; 290 // eps <= z6; 291 // end 292 // 2'b11:begin 293 // sin_out <= ~(x6) + 1'b1; 294 // cos_out <= y6; 295 // eps <= z6; 296 // end 297 // endcase 298 //end 299 300 endmodule
这段代码验证的是CORDIC旋转模式下的情况,有关于旋转模式的具体细节参考网址: