基于SLAM的LiDAR提供的以色列北部史前晚期复杂洞穴的形成过程和空间格局
我们介绍了由GeoSLAM Zeb Horizon系统在上加利利(以色列北部)的Har Sifsof洞穴(HSC)进行的基于SLAM的LiDAR扫描,这是一个复杂的喀斯特洞穴,包含丰富且保存完好的考古组合,可追溯到公元前五千年初。在过去十年中,使用地面激光扫描(TLS)系统进行3D洞穴调查迅速增长。然而,这些系统主要适用于扫描易于接近的地下综合体,其特征是大腔室,其中固定扫描站可以舒适地定位并在每次扫描中覆盖广泛的区域。HSC与黎凡特南部丘陵地区的许多其他洞穴一样,其特点是结构混乱,狭窄空间的多样性,旋转挤压,垂直和陡峭的通道。在这样的洞穴中使用TLS系统需要大量的固定扫描点,每个扫描点只捕获洞穴的一小部分,以实现合理的表面覆盖并消除盲点。相比之下,手动携带的基于SLAM的轻量级激光雷达非常适合记录形态复杂的洞穴,因为它允许在“移动中”记录洞穴几何形状,同时不间断地穿过迷宫般的通道。
2016年夏天,来自以色列洞穴研究中心的两位经验丰富的洞穴探险者(V. Boslov和Y. Lisovets)发现了Har Sifsof洞穴。该洞穴位于上加利利的一个温和的朝南山坡上,海拔806米(33°00′32“N 35°25′35”E)(图1)。
图1 Har Sifsof洞穴及其地理背景:a-b.位置地图(根据谷歌地球调整,2021年);c.Har Sifsof和洞穴的水平范围(白色多边形
Terra Rossa土壤与碳酸盐母岩形成,并支持以橡树和Pistacia为主的地中海马奎斯的植被(图2a)。今天,该地区用于放牧牛群,而近几十年来,山坡的很大一部分被清除用于使用重型机械进行园艺(图1c)。

图2a.Har Sifsof洞穴的入口,展示了周围的岩石地形和地中海风情(;b.e段和f2段之间的一个小竖井中的一堵古老石墙;c.R段的石笋和钟乳石
Har Sifsof洞穴通过垂直竖井进入,其入口的当前配置在表面上几乎看不到(图2a)。竖井通向一个完全黑暗和潮湿的地下空间的复杂系统,总长518米,垂直范围42米。这使得HSC成为加利利地区最大,最复杂的洞穴之一。

图3 文中提到的三个老化室洞穴(HSC、Abud和Nahal Qanah)的平面图(左)和剖面图(右)。三处遗址都有丰富的考古发现,可追溯到黎凡特史前晚期。a.红十字国际委员会于2016年绘制的HSC; b.Nahal Qanah洞穴,1981年至1991年间由红十字委员会绘制; c.阿布德洞穴,红十字国际委员会于2009年绘制.
洞穴的整个空间可以分为两个“翼”(以下简称东翼和西翼),在入口竖井的底部分支。每个侧翼由房间、画廊和通道组成,这些通道排列在多个楼层中,由垂直或倾斜的空隙连接(图3a)。这些空间的轮廓通常由巨石和沉积物描绘,而基岩露头仅在地下系统的边缘。这种洞穴结构是黎凡特地中海高地地区老化室洞穴的典型特征,包括史前时代晚期使用的洞穴,例如西约旦中部高地的Nahal Qanah和'Abud(图3b-c)。洞穴沉积在不断滴落的区域,沉积物通过洞穴系统上部的裂缝和小空隙从地表渗入(图2c)。

图4. HSC的标准2D洞穴学映射,呈现平面视图和多个轮廓。粉红色阴影标记松散的沉积物。黄色阴影标记了观察到重新沉积的碎石燧石物品的区域。
该洞穴最初以1:200的比例绘制(绘制等级5C),而某些产生密集分布的考古遗迹区域后来以更大的比例(1:50,1:100)绘制。该测绘阶段的结果是生成了洞穴及其各个组成部分的平面视图、剖面图和横截面(图 4)。总共投入了四天实地绘制洞穴地图,随后在实验室进行了大约八天的图形处理和制图(使用LimeLight软件管理制图数据,使用Microsoft Paint进行制图)。

图5 HSC的垂直剖面与洞穴上方的表面相结合,由合并和二次采样的点云产生。GeoSLAM Zeb Horizon激光雷达系统安装在Matrice 600 Pro无人机上进行1号扫描,并用手携带进行2号至10号扫描
为了准确绘制洞穴及其周围环境,我们使用了GeoSLAM Zeb Horizon LiDAR系统,扫描速率为300,000点/秒,视场视图为360°x270°,最大扫描范围为100米,最小扫描范围设置为1米,以避免记录扫描仪及其操作员。最小范围并不限制对狭窄通道的记录,测量只有几十厘米,因为它们的几何形状是从多个位置记录的,同时携带扫描仪穿过洞穴(图5)。

图6. 激光雷达360软件从合并和二次采样的点云生成的激光雷达扫描视图;a.洞穴的一般剖面图,方位335◦. 该视图是为洞穴记录的整个数据的投影,如(b)中的虚线正方形和洞穴的平面视图(c)所示。在图a和图c中,从洞穴空间向地表上升的主轴由白色箭头标记,并编号(1-8)(a)的高程色标也适用于(b)和(c)。粉红色的线条(a)表示水、沉积物和小型燧石物品可能通过洞穴渗透的主要管道。
在实地考察期间,在技术细节上投入了大量时间,主要是建造绳索系统(主要是单绳技术,SRT),这是进入洞穴所需的,并且能够通过一些更偏远、难以进入的部分(见图4、图6)。洞穴的泥泞和湿滑环境,加上垂直通道,迫使在移动和操纵扫描仪时格外小心。
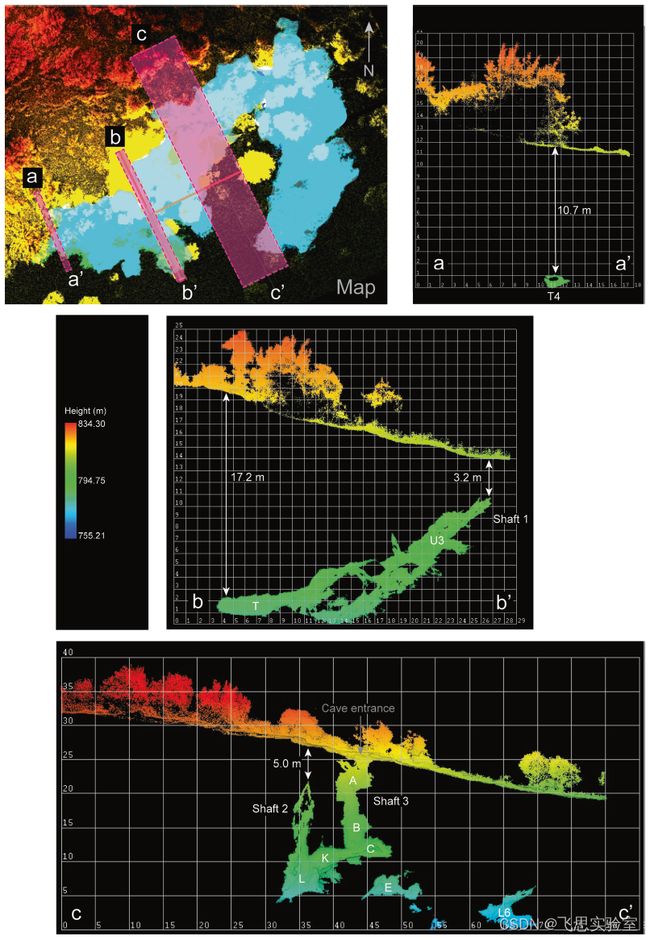
图7.由合并和子采样点云(a-a'、b-b' 和 c-c')产生的三个横截面。每个横截面的位置和宽度由平面视图(左上角)上的粉红色阴影方块指示
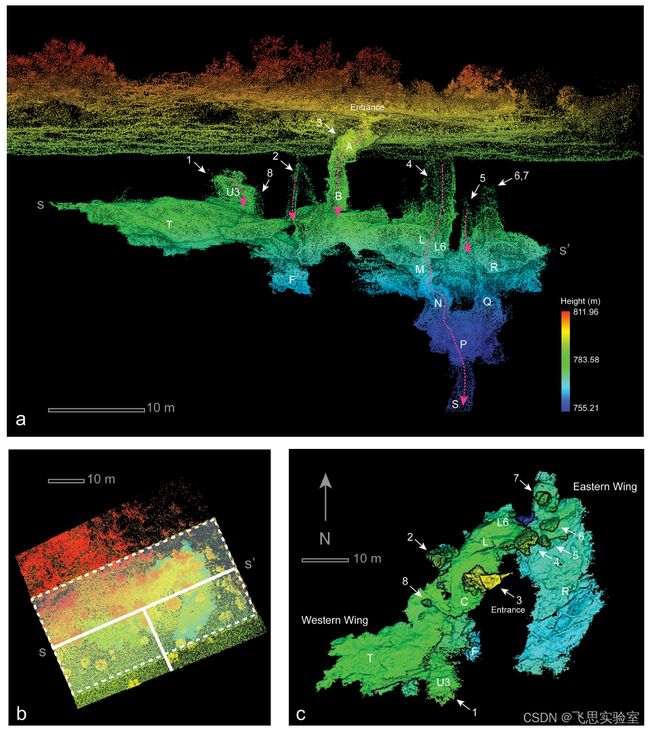
图8.HSC和周围环境的激光雷达扫描镜头,显示了地表地形与地下洞穴结构之间的空间关系
总体而言,在HSC使用基于SLAM的LiDAR系统进行3D洞穴建模被证明是成功的,从而为洞穴及其周围环境创建了单个地理参考点云(图8)。这使我们能够首次检查与地上地形相关的完整洞穴几何形状。
事实证明,基于SLAM的LiDAR系统在恶劣的洞穴环境中运行成功,对几何复杂的洞穴及其近乎亚空中的景观进行了详细的3D扫描。与传统的2D测绘产品相比,可以生成更全面,准确和详细的洞穴图形表示。
源自:Journal of Archaeological Science: Reports 47 (2023) 103745
https://doi.org/10.1016/j.jasrep.2022.103745